
stm32f103 系列,串口有3种工作模式:查询、中断、DMA。本次应用采用DMA中断模式。:DMA是在专门的硬件( DMA)控制下,实现高速外设和主存储器之间自动成批交换数据尽量减少CPU干预的输入,输出操作方式。其USART配置流程:1、串口时钟配置;2、管脚配置(如重映射,管脚模式);3、串口配置;4、DMA配置;中断配置;5、打开串口。
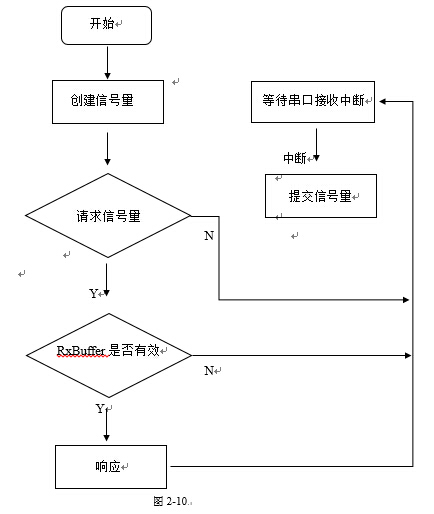
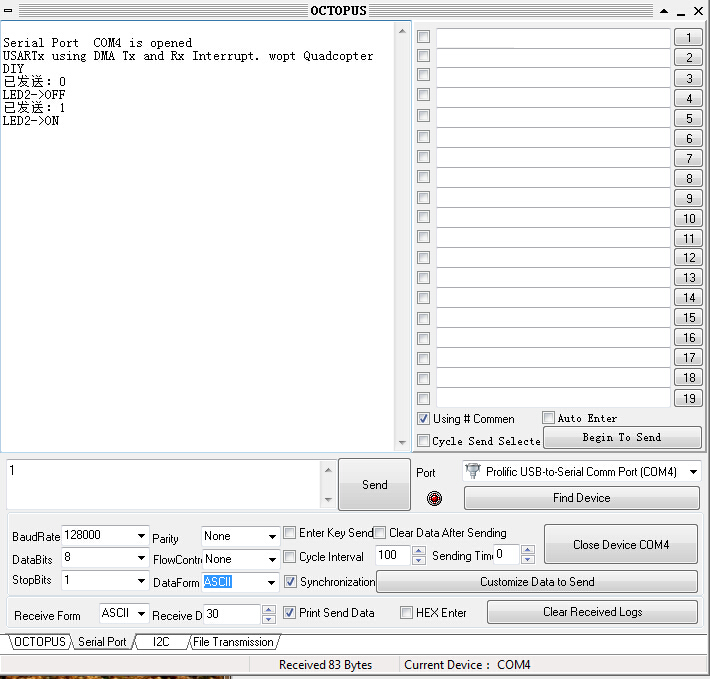
本实验USART(128000 BaudRate,8个数据位,1个停止位,无校验码)功能: 1、开机输出一段字符串; 2、输入 "1" 打开LED,串口输出“LED->ON”; 3、输入 "0" 关闭LED,串口输出“LED->OFF”。
USART程序流程图如图2-10所示。
实验效果图如下。
Quadcopter_usb.rar

 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂