 “圆梦小车DIY套件”推出后,受到了许多爱好者的青睐,深感欣慰!但是,也感到有一些初学者拿到后不知该如何入手?咨询了许多问题。为了减少困惑,我决定逐步基于小车平台写一些示例程序供大家参考,更主要的是期望起到“抛砖引玉”的作用,营造出一个良好的氛围,让“高手”有展示的机会,让初学者有尝试的可能。 “圆梦小车DIY套件”推出后,受到了许多爱好者的青睐,深感欣慰!但是,也感到有一些初学者拿到后不知该如何入手?咨询了许多问题。为了减少困惑,我决定逐步基于小车平台写一些示例程序供大家参考,更主要的是期望起到“抛砖引玉”的作用,营造出一个良好的氛围,让“高手”有展示的机会,让初学者有尝试的可能。
这是第一篇,
圆梦小车(寻迹小车 ) Step by Step 之一
―― 第一个程序“Hello World”
作者:Hanker
前面的章节:
- 车的主体;
- 控制部分中的电机驱动器设计;
- 轨迹采样及逻辑控制部分硬件设计;
- 开环控制功能;
- 电机测速及转速控制;
- 电机驱动部分调试;
- 单MCU控制的程序设计;
- 寻迹小车 FollowMe―― 之八:“圆梦”之旅
“圆梦小车DIY套件”推出后,受到了许多爱好者的青睐,深感欣慰!
但是,也感到有一些初学者拿到后不知该如何入手?咨询了许多问题。为了减少困惑,我决定逐步基于小车平台写一些示例程序供大家参考,更主要的是期望起到“抛砖引玉”的作用,营造出一个良好的氛围,让“高手”有展示的机会,让初学者有尝试的可能。
因为是第一篇,所以顺便将反馈的问题予以回复。
一、 装配注意事项
小车装配时,结构部分要注意:
A. 轮毂由三个部分叠装而成,形成两个槽 ―― 皮带槽和轮胎槽,注意两个槽的宽度不同,不要配错了!!!主要是中间那一层的方向。
B. 电机的小皮带轮装配要按照“装配说明”所示,不要装错方向。
C. 电机安装时,注意电机皮带轮和车轮的皮带槽位置,要在一条直线上。
D. 电机安装时,建议将螺母放在上面,使用M3*8螺丝。
E. 码盘采样器先装,车轮后装,会方便一些;安装码盘采样器用M3*16螺丝,螺母放在上面,这样便于调整。(见上图)
F. 车轮安装后,要调整码盘采样器,避免与车轮碰擦。
G. 车轮轴安装使用M3*16带飞边的螺丝,注意,半圆头处的差别!

H. 如果使用配套的控制板,码盘采样器引出线可剪去4cm;电机引出线可剪去2cm。
控制部分焊接、装配注意:
a) 焊接时可使用一个开口盒子将PCB垫起,便于插件,电阻、电容插件后可先在正面焊一个引脚,固定住器件,之后再在反面焊接。
b) 焊接插座时要对照安装说明,注意插座方向,并且对照原理图,以及连接的对象,检查是否正确,以原理图为准。一定要做这一步,因为这样可以帮助你将实物和原理图对应,理解设计,便于调试。
c) 焊接后不要急于插上芯片,装上电池后,打开开关,检查电源指示灯是否正常,正常后再关闭电源,插上芯片。
d) 焊接驱动三极管D772、D882时,应先用M3*8螺丝固定后再焊接,固定要松紧适度,不要将三极管压碎了。
e) 发光二极管焊接时要注意正、负极,如果没有把握不要贴着PCB焊接。
f) 控制板的晶振(22.1184MHz)在焊好22p电容及单排插座后再焊,不要落底。
g) 扩展板上的晶振也不要落底焊接,避免引起其它部分短路。
h) 5V电源注意原理图上的说明和装配说明的提示!
i) 焊接时,最好在原理图中寻找对应器件时,也思考一下该器件的功能、所起的作用,这样调试遇到问题时就能准确找到症结,如果只是简单“依样画葫芦”,那DIY就没有意义了。搞过PC机DIY的应该有所体验,那个过程对你理解PC机原理有多大帮助!
如果能认真看原理图以及装配说明,DIY应该没有障碍。
二、 小车功能介绍
为了便于后面文章叙述,不产生歧义,这里在介绍功能的同时,将一些常需要涉及的部分约定一个名称,算是“术语定义”吧!这在工程上是基础,看过技术标准的一定注意到,在技术标准中一定有“术语定义”部分,以确保标准的描述准确无误。
结构部分:

(点击看大图)
底盘 ―― 安装所有部件的基础;
电机固定卡 ―― 固定电机;
小皮带轮 ―― 电机转动输出;
码盘采样器 ―― 一种遮断式光电采样器,间隙4mm;
码盘 ―― 由50个约1mm的齿组成,和码盘采样器配合,实现对车轮转动的检测;
轮胎 ―― 增加摩擦力,使用5mm粗的O型圈;
皮带 ―― 传动用,将电机转动传递到车轮,使用1.8mm粗的O型圈;
轨迹采样器安装空隙 ―― 为轨迹采样器安装提供方便;
GP2D12安装位置 ―― 因为GP2D12 是最常用的红外测距传感器,所以预留了一个安装位置,便于用户使用;
控制板安装孔 ―― 用于固定4个六角铜柱,提供控制板的安装位置。

(点击看大图)
球形万向轮 ―― 小车的第三点支撑;
轮毂 ―― 由三部分组成,构成了皮带槽、轮胎槽以及码盘,中间还夹有滚珠轴承,以改善转动性能;
轮轴 ―― 由M3*16 带飞边半圆头螺丝构成;
电机皮带张紧槽 ―― 为4个固定电机的螺丝提供的腰圆孔,便于调节皮带的松紧。
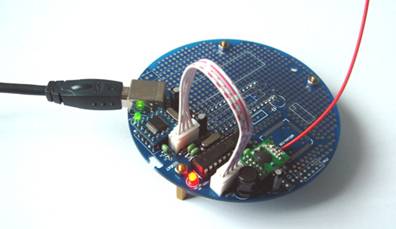
控制部分 ―― 主控板:

(点击看大图)
电源开关 ―― 只控制控制部分的电源,不控制H桥的电源;
电源指示 ―― 监测3V电源(MCU工作电源),正常则亮;
左、右侧H桥保护电路 ―― 使用组合逻辑电路,确保H桥的同侧驱动三极管不同时导通,造成短路。
左、右侧电机正、反转指示 ―― 调试时可以不接电机,降低耗电,同时也方便在小车运动时监测电机输出状态;
主控工作指示 ―― 这个LED是控制部分唯一的“人机界面”,可作为程序正常工作指示,以及调试时监测所期望知道的程序运行状态,是Debug的主要手段之一。
主控UART ―― 控制MCU的UART接口,用于下载程序,与无线接口配合可以实现无线数据通讯,与USB转UART接口配合可以与PC机通讯;
4路轨迹采样电路 ―― 带有背景光消除的反射式采样电路,其功能不一定局限于轨迹采样,后面再详细描述;
码盘采样电路 ―― 左右两路码盘采样预处理,主要是提供了可调整回差的施密特输入处理,以避免采样器停留在码盘齿边沿时造成误信号。
扩展插座 ―― 将MCU的28个引脚及5V电源引到扩展板上,为扩充提供方便,同时使替换控制MCU成为可能。

(点击看大图)
主控电源插座 ―― 提供控制部分的工作电源;
电机电源插座 ―― 提供H桥驱动电源,这样设计一是为了降低干扰,二是为改变电机工作电压提供可能(注意:改变电机工作电压时要相应修改H桥驱动三极管基极电阻);
码盘输入插座 ―― 两路码盘采样器输入,注意焊接引线时与电原理图对应;
电机输出插座 ―― 使用普通2针,主要是为了方便调整电机的转动方向。
控制部分 ―― 扩展板:

USB插口 ―― 因为目前的笔记本电脑已基本无串口,所以使用USB与PC连接;
USB工作指示 ―― 如果焊接正确,且在PC上安装了相应的驱动程序,则连接到PC机后,此LED应亮;
USB转换芯片 ―― 这是一个USB转UART芯片,和PC机上的驱动程序配合,可以利用USB口形成一个虚拟的串口,既避免了没有串口的困惑,也回避了编写USB控制程序的困难。由于STC的MCU下载程序对串口时序有要求,不是每款USB转换芯片都可以使用。
USB转UART接口 ―― TTL电平串口,可以和主控电路连接,实现PC机与小车的通讯,以及控制MCU程序下载。也可以和无线接口连接,构建一个PC机的无线收发接口,还可以对无线接口的MCU编程;
无线接口控制MCU ―― 为了方便实现无线通讯,通过此MCU实现UART通讯向无线通讯的转换,使得控制MCU收发程序不需要任何改动即可实现无线通讯;
无线接口工作指示 ―― 作为无线控制MCU的人机界面,方便监测其工作状态;
无线转UART口 ―― 与控制部分的主控UART相连,可以实现小车无线通讯;与USB转UART相连,可以为PC机增加一个无线收发适配器;
无线收发模块 ―― 433MHz的FSK无线收发模块,价廉物美,十分适合于这种学习性的应用。
MEGA64/128 转换部分 ―― 因为AVR已渐流行,低端的AVR芯片和所选用的控制MCU相差不大,无替换价值;但是MEGA64/128 功能强许多,但其封装限制了学习者,所以此处提供了一个转换区域,便于学习者选用。(买一块单独得转换PCB价格也不菲)
DIP40/窄DIP28MCU焊接区 ―― 因为PIC单片机也广为使用,其多为DIP40 封装,且DIP40 封装的其它MCU也很多,所以设计了一个装换区,以方便选用。
扩展接口 ―― 控制板上的MCU所有引脚都接至此,可方便的适用和测试;
GP2D12预留接口 ―― 因为底盘上设计了GP2D12 的安装位置,所以此处也为其预留的插座位置,以方便使用。
扩展焊盘区 ―― 余下的空间均布满焊盘,以提供发挥的空间。
以上所有术语会在后面的叙述中使用,如遇到且不清楚含义时可查看以确定其位置和功能,帮助理解所描述的内容。
三、 小车的第一个程序
前面介绍小车各部分功能时说过,只有主控工作指示是作为“人机界面”设计的,相当于PC机的显示器,而学过C语言的都知道,开始的第一个程序通常是显示:
Hello World !
所以小车的第一个程序也想控制这唯一的“显示”。
要实现控制主控工作指示,先看一下硬件是如何连接的:

从图中可以看出,主控工作指示由MCU的P3.4控制,低电平亮、高电平灭。根据这个首先编一个简单的程序以实现对它的控制。
这里顺便探讨一个问题:是用C语言开始学习还是用汇编?
我倾向于使用C语言,至少对学过计算机原理的大学生而言如此,因为单片机应用学习主要是掌握这种智能器件的使用特点和过程,而非关注其内部工作原理,使用C语言可以方便的转向任何一种单片机,而不会过多的被某种单片机所羁绊。
汇编语言可以适当了解,在集成开发环境(IDE)下,多留意C语言编译后的汇编代码,看看是如何实现的即可。
言归正传,首先,做一个最简单的程序,控制主控工作指示灯闪烁:
/*******************************************************/
/* 圆梦小车StepbyStep 程序之一 */
/* ―― 控制“主控工作指示” */
/* 20070609 by Dingqi */
/*******************************************************/
// 注:以下文档的 TAB 为 2 个字符!
/*-----------------------------------------------------
这段程序用最简单的方式控制"主控工作指示" ,
目的是示意一下如何装载一段有效的 C 语言程序。
因为程序简单,故所有内容合并在一个文件中。
-------------------------------------------------------*/
#include <STC12C5410AD.h>
/* STC12C5410AD 的头文件,为MCU中各个硬件寄存器定个名称,以便C语言中使用*/
sbit Work_Display = P3^4;
// 根据硬件设计用与“主控工作指示”接近的名称取代硬件名称,使程序减少与硬件的相关性
#define LIGHT 0
// 亮逻辑值,用直观的符号化常数替换与硬件密切相关的逻辑值,增加程序的可读性、可移植性。
#define DARK 1
// 暗逻辑值
#define LIGHT_TIME 1000 // 亮时间,使用符号化常数,便于修改,增加程序可读性
#define DARK_TIME 1000 // 暗时间
#define P3MODE0 0x10 // 00010000,P3.4 设置为开漏输出,其余均为标准 51 口;
#define P3MODE1 0x10 // 00010000,
/*********** 主程序 *****************/
void DelayNms(unsigned int uiNms); // 因为子程序在后面,所以必须在此先声明。
void main(void)
{
// 初始化硬件
P3M0 = P3MODE0; // 因为只涉及 P3 口,所以此处只初始化 P3
P3M1 = P3MODE1;
while(1)
{
Work_Display = LIGHT; // 点亮
DelayNms(LIGHT_TIME);
Work_Display = DARK; // 熄灭
DelayNms(DARK_TIME);
} // 不断循环, 在所有嵌入式应用的主程序中,都有这样一个无限循环.
}
// 延时子程序,实现用软件循环方式延时 N ms
void DelayNms(unsigned int uiNms)
{
unsigned int i,uiCnt_ms;
for(uiCnt_ms=0;uiCnt_ms<uiNms;uiCnt_ms++)
{
for(i=0;i<1400;i++) // 1ms延时循环,此数值由MCU的指令执行时间计算而来, 与时钟和MCU有关
{
}
}
}
使用你所熟悉的编译器编译上述程序,将HEX文件下载到小车中,你将会看到所期望的结果,修改 LIGHT_TIME、DARK_TIME 的数值可随意控制闪烁效果。
注意,必须将STC12C5410AD.h文件拷贝到源程序所在的目录下,否则编译器不认识你所选择的MCU,也就无法将看上去基本与MCU无关的C程序翻译成MCU所能执行的程序。
注意,唯一涉及的硬件P3口比标准51有所改进,详情请看STC12C54的数据手册。
上面的程序并不合理,之所以那样设计,是为了避免开始就为硬件所困扰。从程序中可以看出,所用的计时方式类似于人用“数数”方式计时,费力且不准,最好的方式是有一个“带闹”的计时器,到时候提醒操作。
看下一个程序:
/*********** 主程序 *****************/
bit gb_1msFlag; // 1ms中断标志
void main(void)
{
unsigned int guiDisplayTime; // 显示时间计数器
bit gb_CurDisp; // 记忆当前显示状态
// 初始化硬件
P3M0 = P3MODE0; // 因为只涉及 P3 口,所以此处只初始化 P3
P3M1 = P3MODE1;
/* 初始化定时器 */
TMOD = T0MODE1; // Timer0 工作在模式1 ,16位定时
AUXR = AUXR&CLR_T0X12_C; // Timer0 工作在12分频
TCON = 0; /* 未使用外部中断,所以不用定义中断的触发方式 */
TH0 = TIME1msH_C;
TL0 = TIME1msH_C;
TR0 = TRUE;
/* 初始化中断 */
IE = EnT0_C; // 此处只允许 Timer0 中断,
IPH = NOIP_C; // 此处不设优先级,有各功能模块自身设定
IP = NOIP_C;
// 初始化起始状态 ―― 亮
Work_Display = LIGHT; // 点亮
gb_CurDisp = LIGHT; // 记忆当前状态,
guiDisplayTime = LIGHT_TIME; // 显示时间
gb_1msFlag = FALSE;
EA = TRUE; // 启动中断,开始正常工作
while(1)
{
if(gb_1msFlag == TRUE)
{
gb_1msFlag = FALSE;
guiDisplayTime--; // 计时
if(guiDisplayTime ==0)
{
if(gb_CurDisp == LIGHT)
{
Work_Display = DARK; // 熄灭
gb_CurDisp = DARK;
guiDisplayTime = DARK_TIME;
}
else
{
Work_Display = LIGHT; // 点亮
gb_CurDisp = LIGHT;
guiDisplayTime = LIGHT_TIME;
}
}
}
} // 不断循环, 在所有嵌入式应用的主程序中,都有这样一个无限循环.
}
/********************************************/
/* 定时器 0 中断服务 */
/* 说明: 1ms 中断一次, */
/********************************************/
void Timer0_Int(void) interrupt 1 using 1
{
TH0 = TIME1msH_C;
TL0 = TIME1msL_C;
gb_1msFlag = TRUE;
}
由于篇幅原因,将程序中的宏定义部分略去,可下载YM1_Prog-1A.C看全部内容。
从这个程序可以看出,两个功能完全相同,只是计时任务主要交给了定时器0完成,它通过中断方式设置一个标志,相当于“ALARM”,主程序中只当有了这个标志时才作相应处理,其余时间处于等待状态,为做其它事提供了可能!
至此,我们已可以控制主控工作指示亮、暗了,但似乎单调了些,没有内容。
用一个灯如何表达“hello World”?
莫尔斯电码(Morse code)!
莫尔斯电码(Morse code)是美国人莫尔斯于1844年发明的, 由点(.)、划(-)两种符号组成。
1) 一点为一基本信号单位,一划的长度 = 3点的长度。
2) 在一个字母或数字内,各点、划之间的间隔应为两点的长度。
3) 字母(数字)与字母(数字)之间的间隔为7点的长度。
电码表见附件一。
我们可以控制主控工作指示灯的亮、暗时间模拟“点”、“划”,实现显示“hello World”。
因为程序稍长,不在文中列出,可下载附件中的“SbS_Prog-1B.C”参阅。程序是在前面程序的基础上修改的,主要构思基于如下变量的设计:
unsigned char gucDispBuf[MAX_CHAR_NUM+1]; // 显示缓冲区,存放要显示的字符,为“0”表示结束
unsigned char gucGetCharPtr; // 从显示缓冲区取字符指针
unsigned char gucCharDispBuf[MAX_GAP_NUM];
// 一个字符显示时亮、暗显示序列,存放显示基本时间单位的个数,为“0”表示结束
unsigned char gucGetDispNum; // 取亮、暗基本时间数指针
unsigned char gucDispNumCnt; // 基本时间数计数器
unsigned int guiBaseTime; // 基本时间计数器, 1ms 计数
unsigned char code DISP_CONTENT[MAX_CHAR_NUM+1] = {"HELLOWORLD"};
// 要显示的内容,因为莫尔斯电码没有定义空格
从上面变量的设置可以大概看出程序的构思:
使用一个1ms计数器形成莫尔斯电码的信号单位,构建一个数组存放一个字符的亮、暗控制序列,存放信号单位数。构建一个数组作为显示缓冲区,存放要显示的字符。
通过程序将字符翻译为符合莫尔斯电码的亮、暗控制串。注意:翻译程序中设计了一个常数数组 unsigned char code gucMorseCode[26][9],读者可以比较这个处理与汇编程序的差别,是否可读性大大增强了?
读者可以改变 DISP_CONTENT ,以显示自己想要的内容,还可以修改 BASE_TIME ,方便的改变发送的速度。
四、 结语
做上述程序主要目的是为了让初学者能够找到驾驭单片机的感觉,让他觉得这一切并不神秘,只要有一定的基础知识并且会PC机操作即可。
在此,我想谈一下对“单片机应用”学习目标的一旦看法:
“单片机应用”学习应该是一次实践,它本身没有任何属于自己的知识点,是建筑在“计算机原理”、“C语言编程”、“电子技术基础”等课程基础上的,是这些知识在具体产品(单片机)中的应用。而学习它的目的主要是学会运用上述基础知识看懂某个产品(单片机)的技术资料,并且通过使用之验证自己的理解,培养阅读、设计、实践的能力。
不知大家是否认同?
这是一个开始,之二将着眼于MCU与PC的通讯,人需要交流,机器也同样!
――――――――――――
Hanker
2007年6月10日星期日
资料:
圆梦小车的第一个程序
显示“SOS”的视频
全文PDF下载
附件一:
莫尔斯电码表:
字符 电码符号 字符 电码符号字符
A ● ― N ―●
B ―●●● O ― ― ―
C ―●―● P ●― ―●
D ―●● Q ― ―●―
E ● R ●―●
F ●●―● S ●●●
G ― ―●● T ―
H ●●●● U ●●―
I ●● V ●●●―
J ●― ― ― W ●― ―
K ―●― X ―●●―
L ●―●● Y ―●― ―
M ― ― Z ― ―●●
数字 电码符号 标点符号 电码符号
1 ●― ― ― ― ? ●●― ―●●
2 ●●― ― ― / ―●●―●
3 ●●●― ― ( ) ―●― ―●―
4 ●●●●― ― ― ●●●●―
5 ●●●●● 。 ●―●―●―
6 ―●●●●
7 ― ―●●●
8 ― ― ―●●
9 ― ― ― ―●
0 ― ― ― ― ―
提醒:
由于文章是分开多节上传到网站上,为了方便大家讨论,请把相关的问题集中在这个帖子上,这样可以方便作者回答大家的问题,谢谢!
|







 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂