
作者:重庆科创职业学院 陶俊 张绍发 杜帅
指导教师:闫俊岭 钱游
作品简介
随着科学技术的发,传统类工艺品虽然强居首位,但是电子类工艺品也不示弱。例如:在淘宝商城上各式各样的电子工艺品成出不穷,且还具有一定实用价值,这是很多传统类工艺品所不具备的。磁悬浮地球仪是一个能克服地球引力悬浮在空中并且保持稳定悬浮的装置。本设计利用电磁感应原理及其单片机编程技术,实现了悬浮地球仪克服地球引力并稳定悬空的效果。而且体积较小,放置方便。
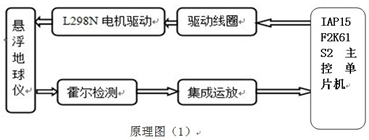
本系统主要以IAP15F2K61S2单片机为主控部分、电机驱动、霍尔传感器、集成运放、电位器、漆包线等外围检测、驱动、调试部分组成。首先由霍尔对悬浮地球仪的位置进行检测,并将检测的信号送到运放器进行放大后送单片机进行PID调节控制。其次单片机将处理的信号经L298N电机驱动送至线圈,最后线圈根据送来了信号对悬浮地球仪的位置进行修正,使之达到稳定状态。
磁悬浮地球仪集神奇与实用为一体,可用作商店广告展示、家具装饰、儿童玩具、电子礼品等。该作品创作新颖,构思巧妙,功能独特,能满足人们对高科技的追求,是实现现代科技生活的完美诠释。
平台选型说明
IAP15F2K61S2
设计说明
1.作品设计原理:
我们磁县浮地球仪设计原理是根据磁铁具有永久性磁场及同性相斥的原理来使浮子悬浮在空中;加用IAP15F2K61S2单片机和PID控制技术并结合线性霍尔元件对磁场的检测作用,来确定浮子的位置;通过四个线圈实时控制浮子左右前后移动,使之保持在平衡位置内。这样我们的浮子就能平稳的悬浮于空中,原理如图(1)。
2.硬件部分:

2.1霍尔定位检测原理:
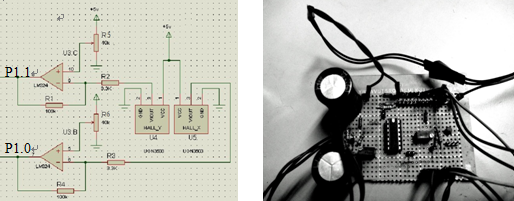
该模块主要通过两个UGN3503霍尔传感器对上主板进行定位检测。其主要工作原理是单片机通过霍尔传感器获取浮子的位置,当发现偏离中心时,就驱动L298D,给线圈通电,把它推回原位置。为了使传感器读数更为精确,电路使用了数字放大器LM324和两个电位器。其中电位器R5是多圈电位器,用来微调放大器的输出范围,电位器R6是普通的旋转电位器,用来粗调上部装置的平衡位置见下图(2)(3)。
2.2单片机PID控制原理:
霍尔输出-->采集ADC-->PID 运算,得到控制偏移量-->TIMER1自动产生PWM波形,占空比受控于PID函数的运算结果-->X,Y电磁铁产生双向磁场,纠正悬浮磁铁的偏移或倾斜。
2.3线圈驱动模块原理:
本作品采用直径为0.27mm的康铜丝漆包线进行缠绕,绕约800匝,制成线圈。每个线圈的电阻大约是40Ω。为了给装置提供足够大的磁力,相同的线圈需要4个,相对的两个线圈,需要把同级连在一起,这样能保证当一组线圈两端加上电压时,一个线圈对上部装置产生拉力,另一个则产生吸力,通过单片机控制L298D模块对线圈进行驱动,从而达到控制上主板位置的目的,见下图(4)(5)。

原理图(4) 实物图(5)
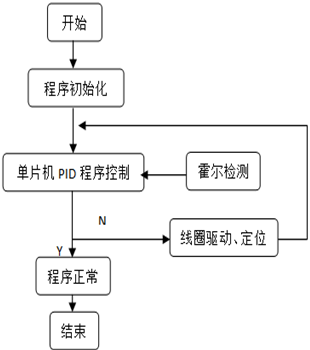
3.软件控制原理:
软件部分采用C语言编写,软件部分侧重于传感器的数据采集和处理,其次就是线圈PWM的控制和显示内容控制,其系统软件流程图见图(6)
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂