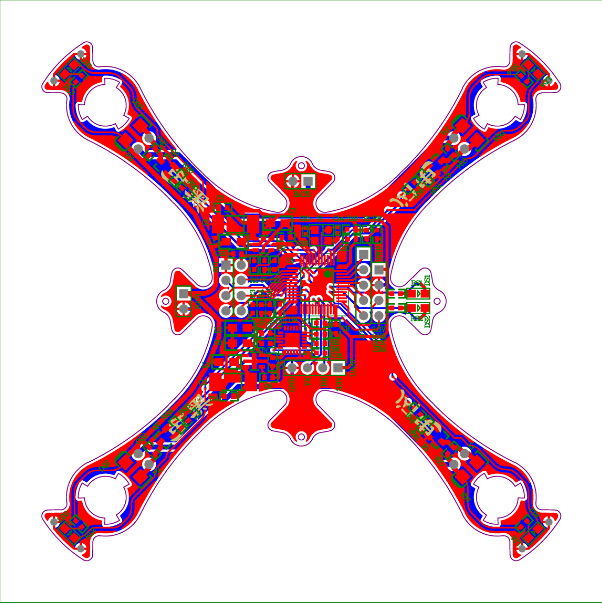
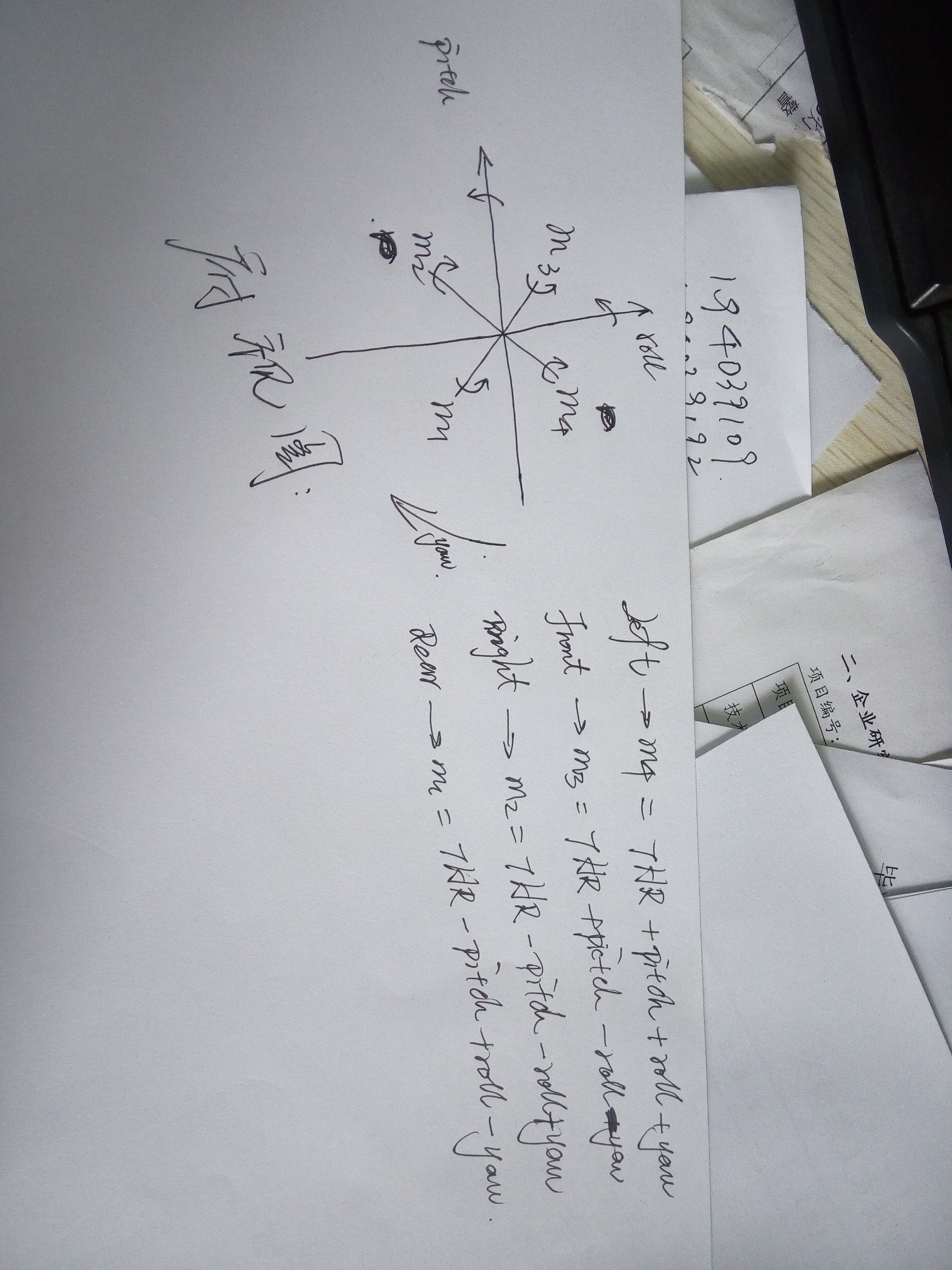
四轴的ROLL,PITCH,YAW的部分算法程序;
//二阶毕卡法
void IMUupdate(float* Roll, float* Pitch, float* Yaw,
float gx, float gy, float gz,
float ax, float ay, float az, float* fusionDt)
{
#ifdef IMUMpu_Set
float delta_2=0;
// float gx, gy, gz, ax, ay, az;
// float Fgx, Fgy, Fgz; // estimated gravity direction
float norm = 0.0f;
// float halfT;
float vx, vy, vz;
float ex, ey, ez;
const static float FACTOR = 0.002;
// 先把这些用得到的值算好
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
// float q0q3 = q0*q3;
float q1q1 = q1*q1;
// float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
// getInitMpu(&gx, &gy, &gz, &ax, &ay, &az);
// gx = Gyrox;
// gy = Gyroy;
// gz = Gyroz;
// ax = Accelx;
// ay = Accely;
// az = Accelz;
/*归一化测量值,加速度计和磁力计的单位是什么都无所谓,因为它们在此被作了归一化处理*/
//normalise the measurements
// norm = invSqrt(ax*ax + ay*ay + az*az);
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3;
//现在把加速度的测量矢量和参考矢量做叉积,把磁场的测量矢量和参考矢量也做叉积。都拿来来修正陀螺。
// error is sum of cross product between reference direction of fields and direction measured by sensors
ex = (ay*vz - az*vy);
ey = (az*vx - ax*vz);
ez = (ax*vy - ay*vx);
/*
// integral error scaled integral gain
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
// adjusted gyroscope measurements
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
*/
// halfT = SysTickUser / 2000;
// *fusionDt = SysTickUser / 1000;
*fusionDt = 0.002;
gx = gx + ex*FACTOR/halfT; //校正陀螺仪测量值 用叉积误差来做PI修正陀螺零偏
gy = gy + ey*FACTOR/halfT;
gz = gz + ez*FACTOR/halfT;
delta_2=(2*halfT*gx)*(2*halfT*gx)+(2*halfT*gy)*(2*halfT*gy)+(2*halfT*gz)*(2*halfT*gz);
q0 = (1-delta_2/8)*q0 + (-q1*gx - q2*gy - q3*gz)*halfT; // 整合四元数率 四元数微分方程 四元数更新算法,二阶毕卡法
q1 = (1-delta_2/8)*q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = (1-delta_2/8)*q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = (1-delta_2/8)*q3 + (q0*gz + q1*gy - q2*gx)*halfT;
/*
// integrate quaternion rate and normalise,四元数更新算法,一阶龙格-库塔法
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
*/
// normalise quaternion
// norm = invSqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm; //w
q1 = q1 / norm; //x
q2 = q2 / norm; //y
q3 = q3 / norm; //z
#endif
// 由四元数计算出Pitch Roll Yaw,乘以57.3是为了将弧度转化为角度,陀螺仪x轴为前进方向
// *Pitch = asin(2 * q2 * q3 + 2 * q0 * q1) * 57.295780; //俯仰角,绕x轴转动
// *Roll = -atan2(2 * q1 * q3 - 2 * q0 * q2, -2 * q1 * q1 - 2 * q2* q2 + 1) * 57.295780; //滚动角,绕y轴转动
// *Yaw = atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2 * q2 - 2 * q3 * q3 + 1) * 57.295780; //偏航角,绕z轴转动
*Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)*57.295780; // pitch
*Roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)*57.295780; // roll
*Yaw = -atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2 * q2 - 2 * q3 * q3 + 1)*57.295780; //偏航角,绕z轴转动
// *Yaw = 0;
if(*Yaw < -180 ){*Yaw = *Yaw + 360;}
if(*Yaw > 180 ){*Yaw = *Yaw - 360;}
}





 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂