
电赛忙完了,开始调试平衡车了。
8-16 开始将在本帖更新学习和调试平衡车过程,以及遇到的问题和一些要注意的东西,希望和大家一起进步
第一次发帖,可能排版会有点问题,望见谅
电赛忙完了,开始调试平衡车了。
8-16 开始将在本帖更新学习和调试平衡车过程,以及遇到的问题和一些要注意的东西,希望和大家一起进步
第一次发帖,可能排版会有点问题,望见谅
8-16更新:(安装,测试)
快递刚好在电赛开始那天到

然后利用 空余时间慢慢把车子拼好了

快递盒和里面全部东西,店家包装保护得真的很好。

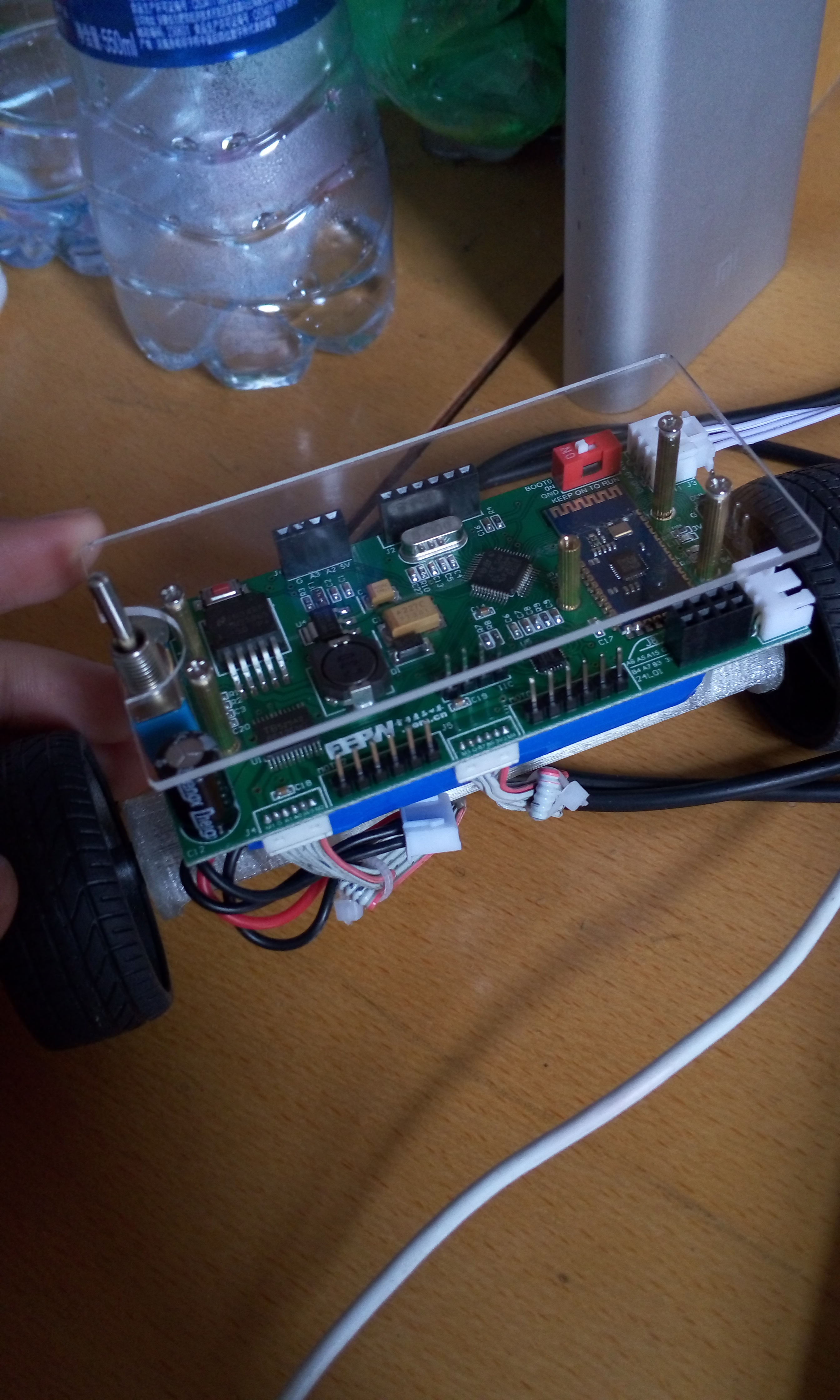
小车上面没有OLED 是因为OLED在另外一个平衡车上,改天再去把OLED 装到这上面来吧
附上小车视频:
视频地址:http://player.youku.com/player.php/sid/XMTMxMTM3NDA0MA==/v.swf
视频地址:http://player.youku.com/player.php/sid/XMTMxMzcyNjYxMg==/v.swf
加上超声波模块和OLED后:
视频地址:http://player.youku.com/player.php/sid/XMTMxMzcyNjU4OA==/v.swf
视频地址:http://player.youku.com/player.php/sid/XMTMxMzcyNjU4MA==/v.swf
在期间的一些小问题:
1. 在下载程序的时候记得把红色开关拨到off 档,虽然实际上没有标off 。

也就是 拨到右手边
2. 下载完后 程序应该就会跑起来,如果下载过程中拿在手上,小车车轮就会狂转。
就像这样:
视频地址:http://player.youku.com/player.php/sid/XMTMxMTM3NDA0NA==/v.swf
把电源开关关了,红色开关拨到ON,保持小车大概直立打开电源开关,看见蓝灯和红灯都闪后,按一下左上角的按键开关就可以看见小车保持直立平衡了。
8-16更新:(MDK安装)
个人觉得keil 还是很人性化的,网上MDK5.14 安装包还是很多的,这里我还是给个链接吧
MDK 5.14百度云 http://pan.baidu.com/s/1bnnjANl
注册机 Keil_ARM_MDK_5.00_Keygen_serial_Crack.zip
破解过程还是很简单的,但是要 每个步骤都罗列出来还是挺麻烦的,实在不懂可以自己百度一下,这里我还是只给个参考的链接吧
在期间的一些小问题:
1. 卖家给的例程 开发平台是MDK4.7,低版本打开可能会无法完成编译,论坛上面更新的例程是MDK5.1
8-17更新:(MDK5.14工程建立)
这里不对模板 工程的建立方法作介绍
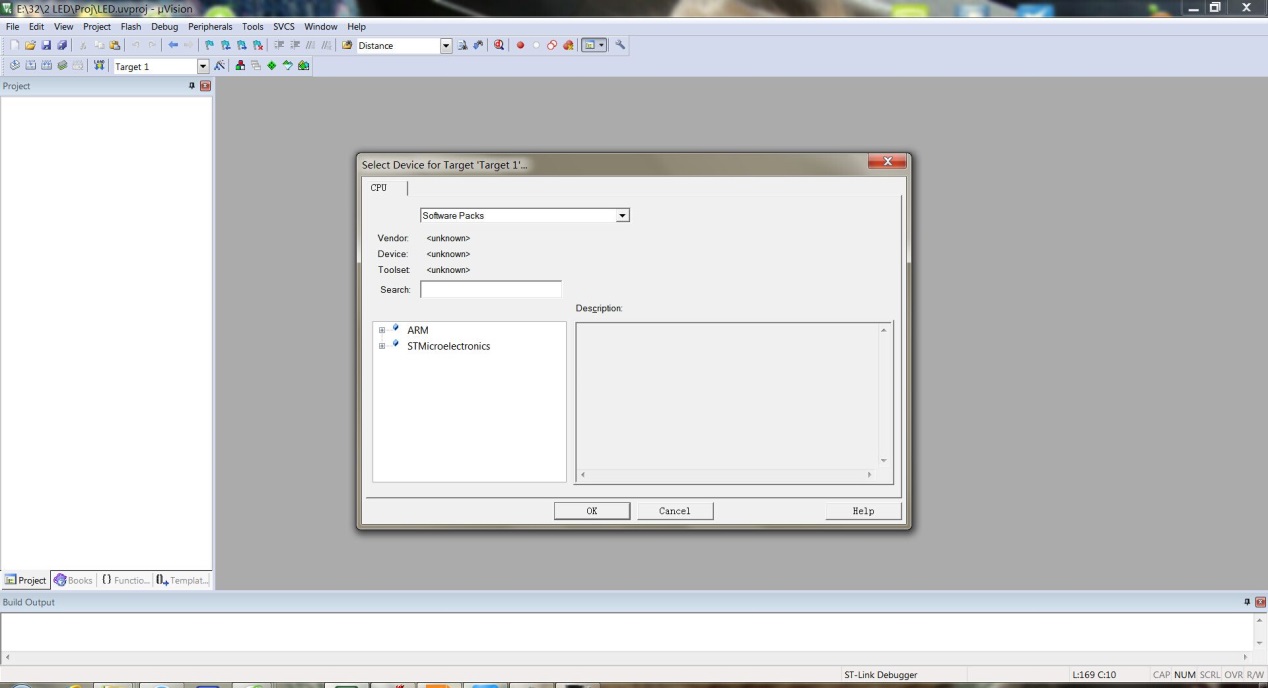
安装好破解过后的MDK5.14 后打开软件,点击Project
新建工程

然后就弹出下面的界面
相应的芯片资料可以去官网下载,一般在安装完成MDK第一次打开是会有提示下载器件包,或者自己打开

进行对应的下载。
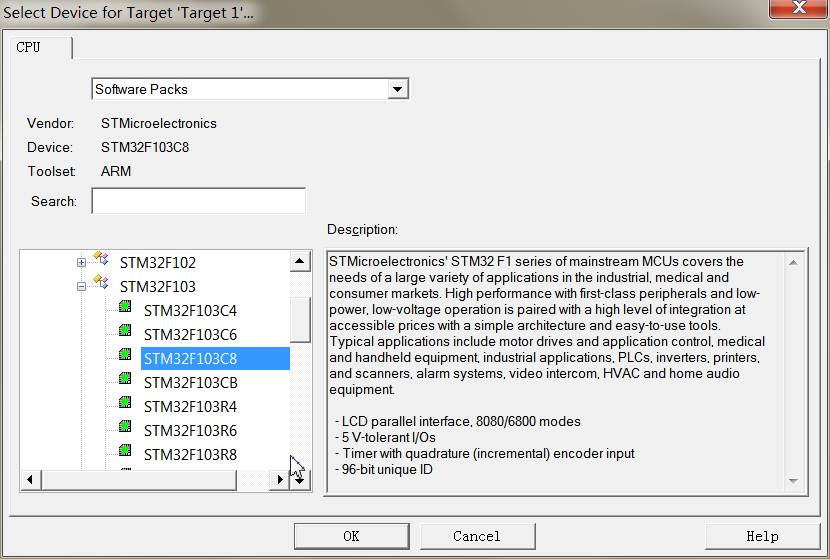
小车上面的是STM32F103C8T6,点击OK
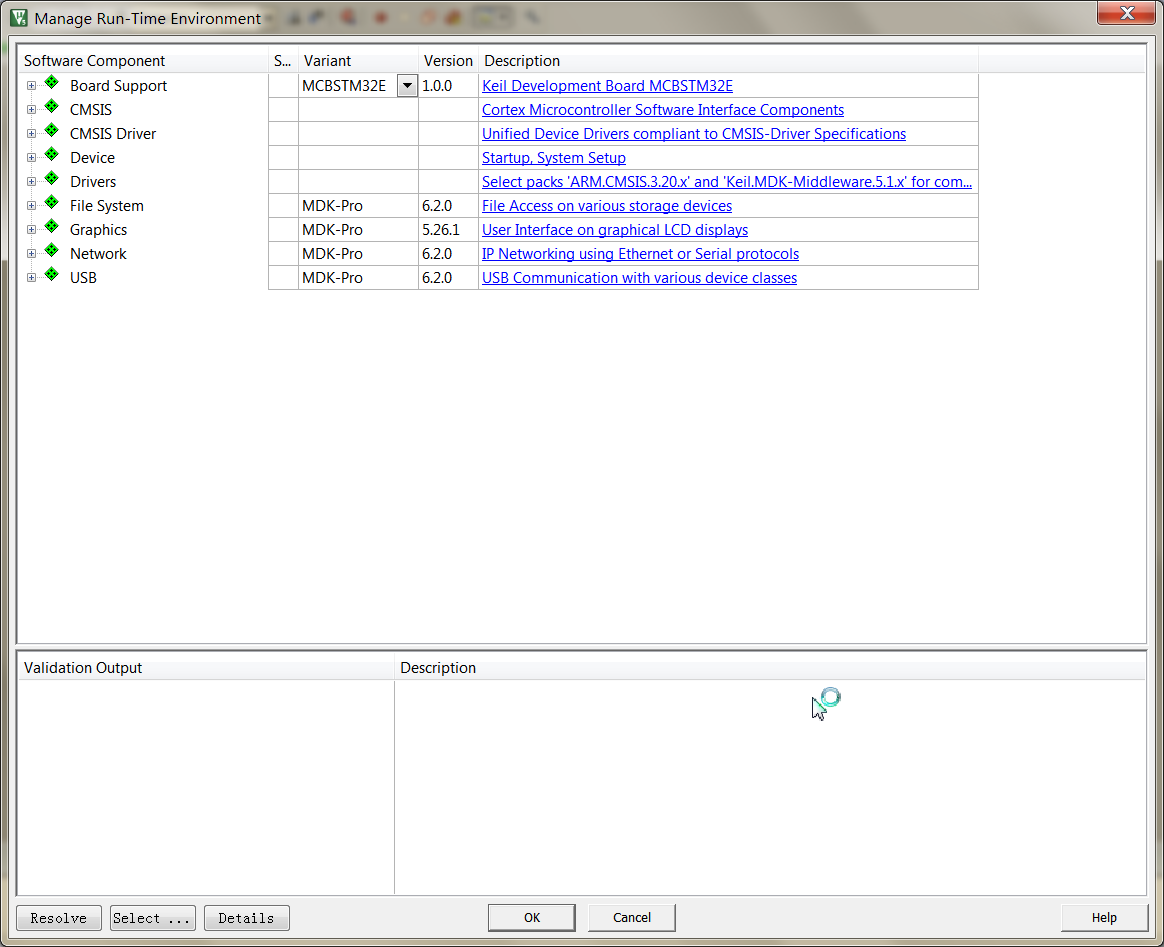
配置自己的工程环境,这里面包括启动文件和核心文件,大家就按自己的需求来配置吧,在这儿我就只用了一些简单的功能。在这儿要注意一下,当你选择某个功能的时候软件会提示你要想这个功能正常工作,可能还会需要某些文件。必选的有CORE和Startup. 配置正确是绿色的,不正确是橙黄色。
下图是简单的一些配置
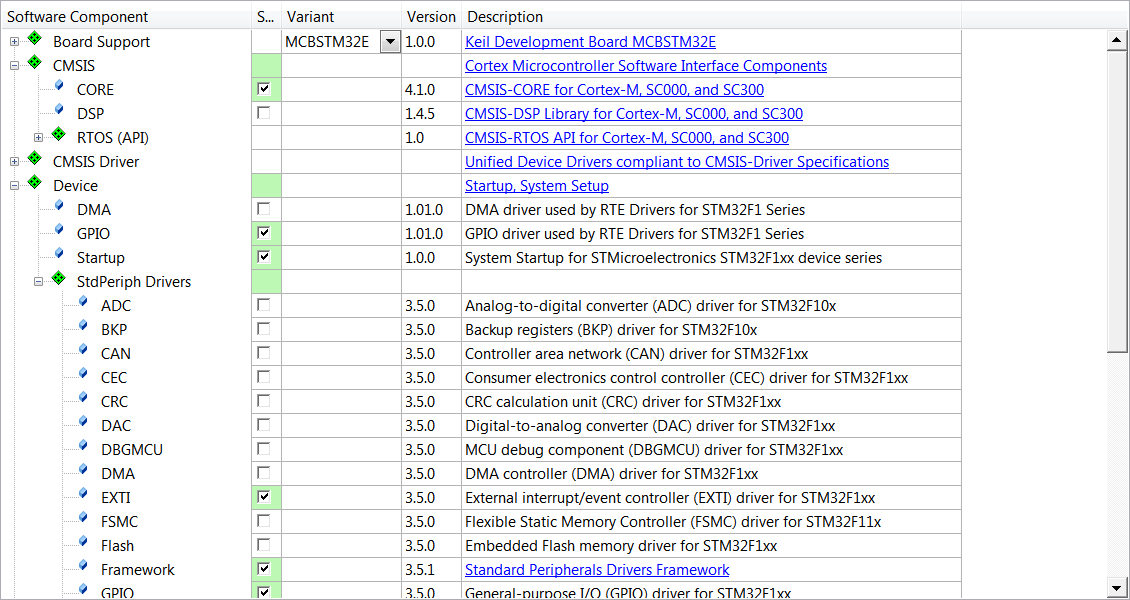

下面贴一张配置不正确的图

可以根据下面的提示来正确配置。
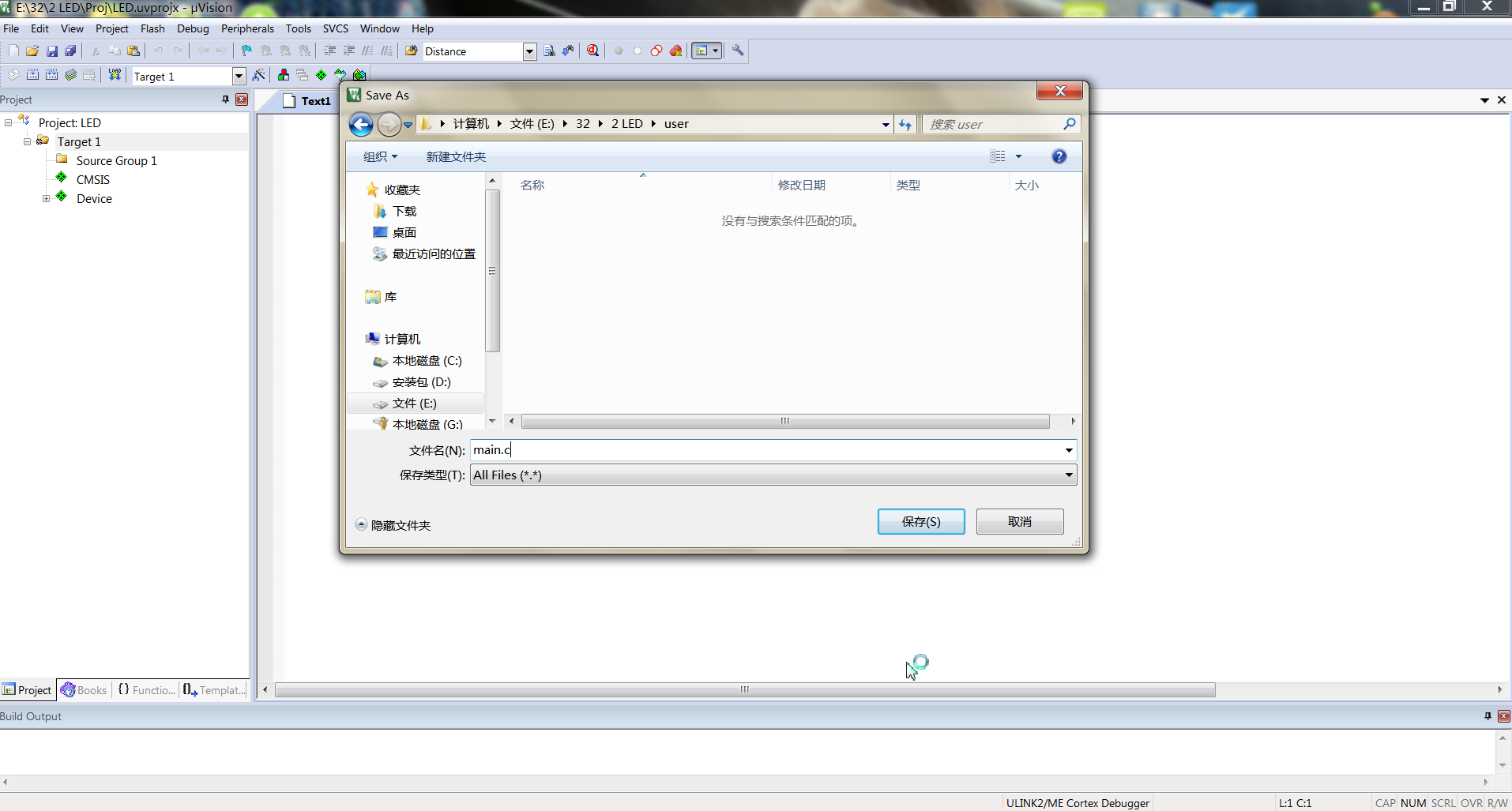
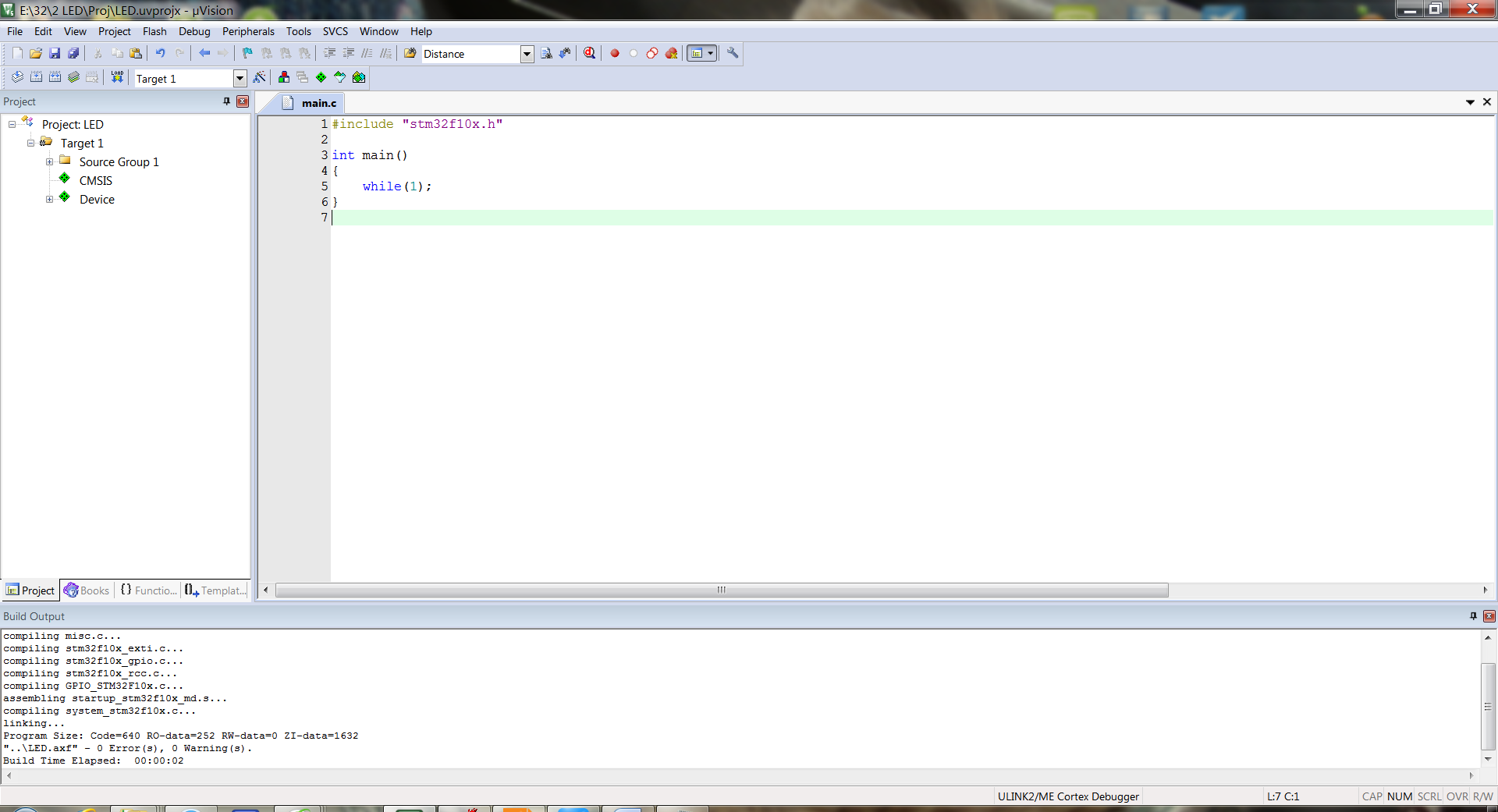
配置完成后新建一个main.c 或者add 一个main.c 文件
编译一下,没有问题
下面再说一下设置自动索引功能,点击![]() 图标
图标

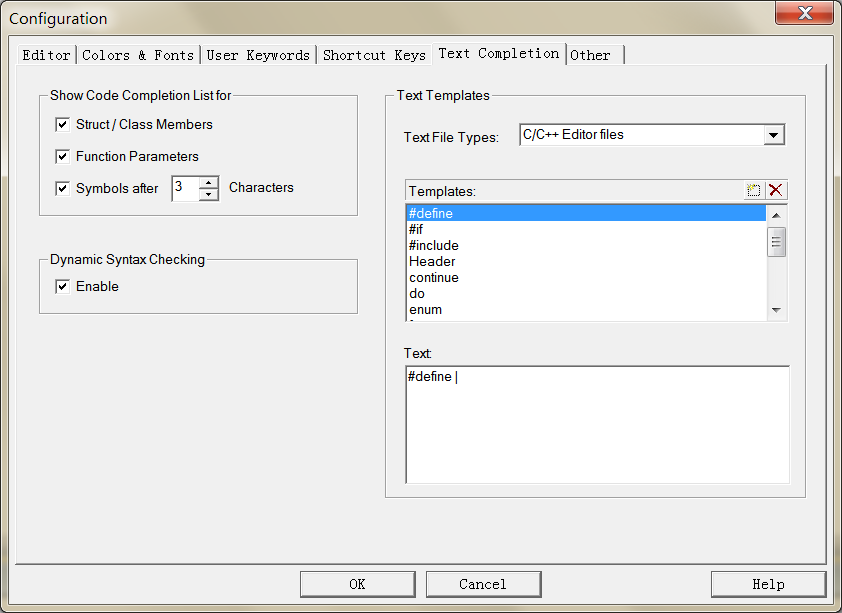
勾上![]() 就可以愉快的敲代码了
就可以愉快的敲代码了
效果图

编辑得好累..有什么不对的地方欢迎指出,我会及时改过来的。
9-7更新:(NRF24L01测试)
然后觉得什么库函数寄存器版本都一样,可能是因为从51开始就自己写库吧  (这个装逼我给满分
(这个装逼我给满分 )
)

先把原来默认注释的程序的 注释去掉,下载到安好24l01的小车上去

在原来的程序里正常情况使用24l01 oled是不显示的.. 具体看一下程序就懂了
具体看一下程序就懂了
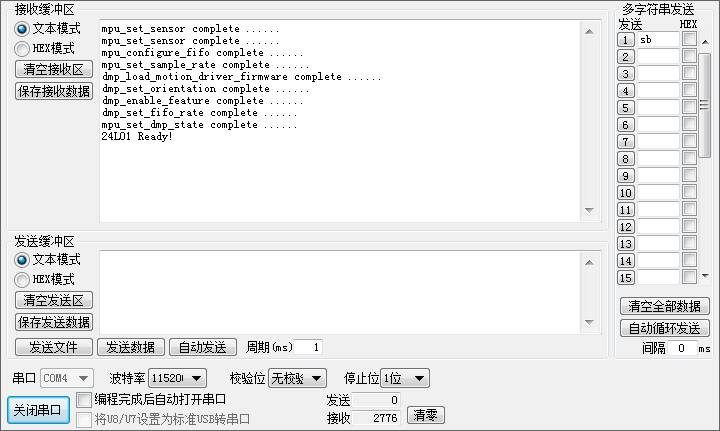
用串口可以查看24l01 的好坏.. 我之前用了块坏的。。搞了半天还以为是程序问题。。幸好我有4块 还有一个问题就是为什么我以前 用51调24l01 调了个星期 = = 除了对寄存器有了更好的了解就是调不出来
我之前用了块坏的。。搞了半天还以为是程序问题。。幸好我有4块 还有一个问题就是为什么我以前 用51调24l01 调了个星期 = = 除了对寄存器有了更好的了解就是调不出来 这次又这么顺利 看人品的吗?
这次又这么顺利 看人品的吗?
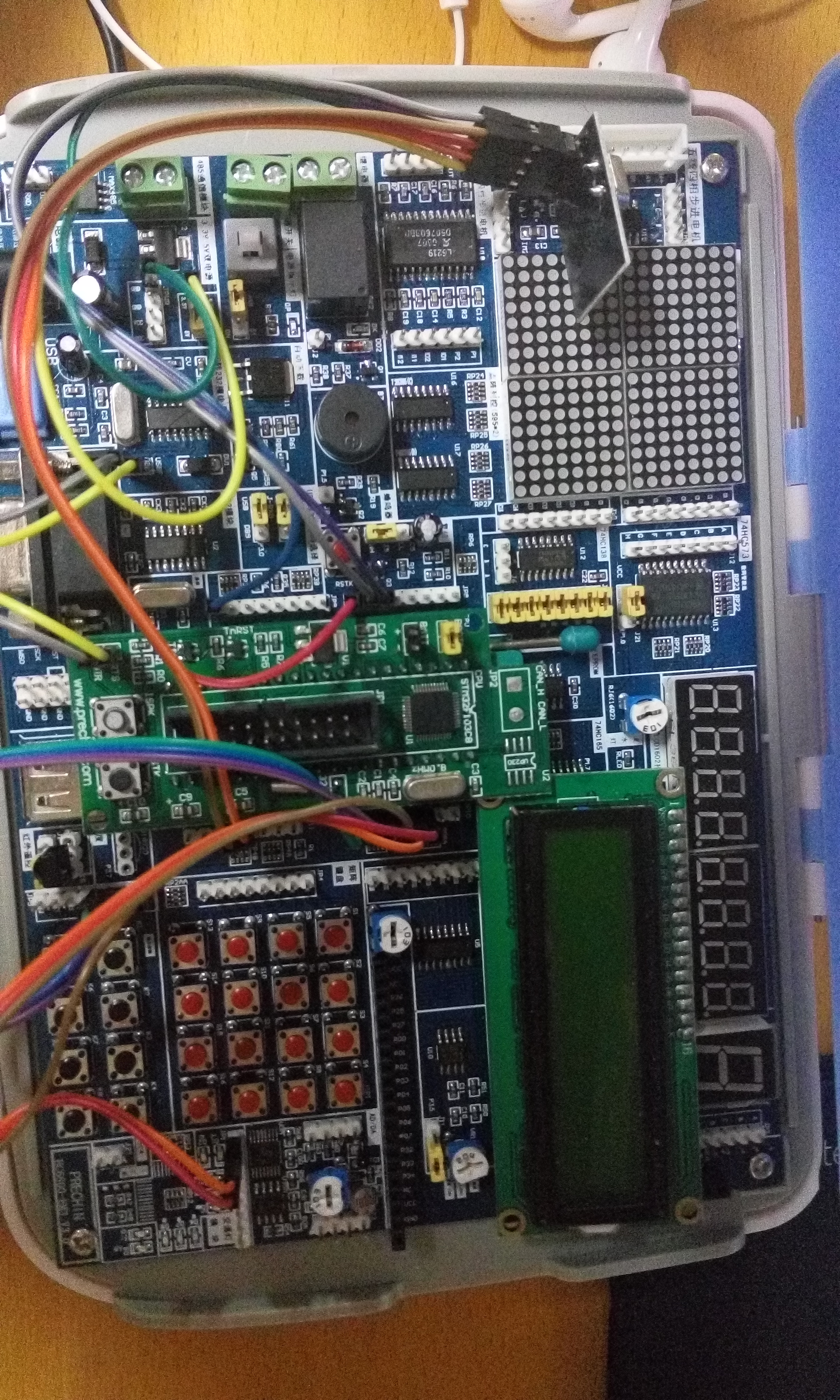
欧,忘了说了,我用的是普中 的板子来当发射端的

视频地址:http://player.youku.com/player.php/sid/XMTMzMDAzNzYxNg==/v.swf
附上之前调24l01参考的网站:
http://forum.eepw.com.cn/thread/249735/1
http://www.zhixinrui.com/forum-47-3.html
注意事项:
使用24l01时记得关了jtag,特别是发送端!有一些端口共用了...
刚好别人买了两个ccd,我就借了个过来玩玩

蓝宙的 3代
蓝宙的上位机和32例程
有人遇到同样的问题吗??
之前一直在调4个轮子的车,弄到不想弄了就来调调平衡车吧
架上CCD的样子,就是平衡的时候有点晃,用热胶粘上去的

首先要注意板子的CCD引脚是不是和CCD的引脚一样,之前我就因为这个一直得不到图像
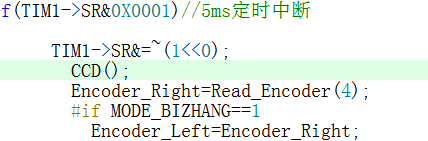
CCD();函数放在5ms中断里面程序会有问题,而且在主函数里面用ccd的话,oled的刷新会明显降低

下面讲一下我用来检测黑线,沿轨迹走的思路,大神勿喷~
看上位机传回的图像,对于程序里面判断黑线的方法,可以先检测出白纸的部分,即adc采集回来的数值大于一个定义好的阀值且在一定的数量
else if(Mid_Cnt <= 10 && ADV[j] > Value) //先有白纸
{
Mid_Cnt++;
Flag_Mid = 1;
}
判断黑线就是在白纸的基础上连续检测到低于阀值的点,即判断为黑线的位置
附上视屏(在源程序的基础上把中线位置显示在oled的角度数值的后面)
视频地址:http://player.youku.com/player.php/sid/XMTM0NTQwOTA1Ng==/v.swf
CCD对于光线的要求很高,在不同的环境下要根据上位机图像来调节阀值,可以用上位机的二值化阀值来改程序里面的阀值设置
if(MID > (Expect +15))
{
Flag_Qian=0;Flag_Hou=0;Flag_Left=0;Flag_Right=1;
}
else if(MID < (Expect -15))
{
Flag_Qian=0;Flag_Hou=0;Flag_Left=1;Flag_Right=0;
}
else
{
Flag_Qian=0;Flag_Hou=0;Flag_Left=0;Flag_Right=0;
}
根据黑线来转弯的程序是直接根据蓝牙控制来写的,不过有一点不好的就是转弯速度有点快,如果想更平稳的话可以自己改一下转弯的速度
视频地址:http://player.youku.com/player.php/sid/XMTM0NTQwMjEyNA==/v.swf
这是调试的时候的视频,因为在宿舍自己搭的环境,灯光不是很好,上位机看到的几乎都是黑色,而且画的跑道弯道有点急
调整了阀值和加了一些灯光在弯道部分之后就好多了
视频地址:http://player.youku.com/player.php/sid/XMTM0NTQwMjEyMA==/v.swf
可以看到在光线好的那部分沿轨迹跑还是不错的,但是后面部分光线有点问题,如果在程序中加入自适应曝光的话在某些情况下会影响平衡,所以 还是自己手动调节阀值比较好。
最后附上程序
CCD检测在adc.c里
阀值,中线预值设置在sys.h里
飞思卡尔CCD循迹的程序
可以参考这个程序
10-13更新: 遥杆控制小车
既然都买回来了,那就装上玩玩呗,不然多无聊啊
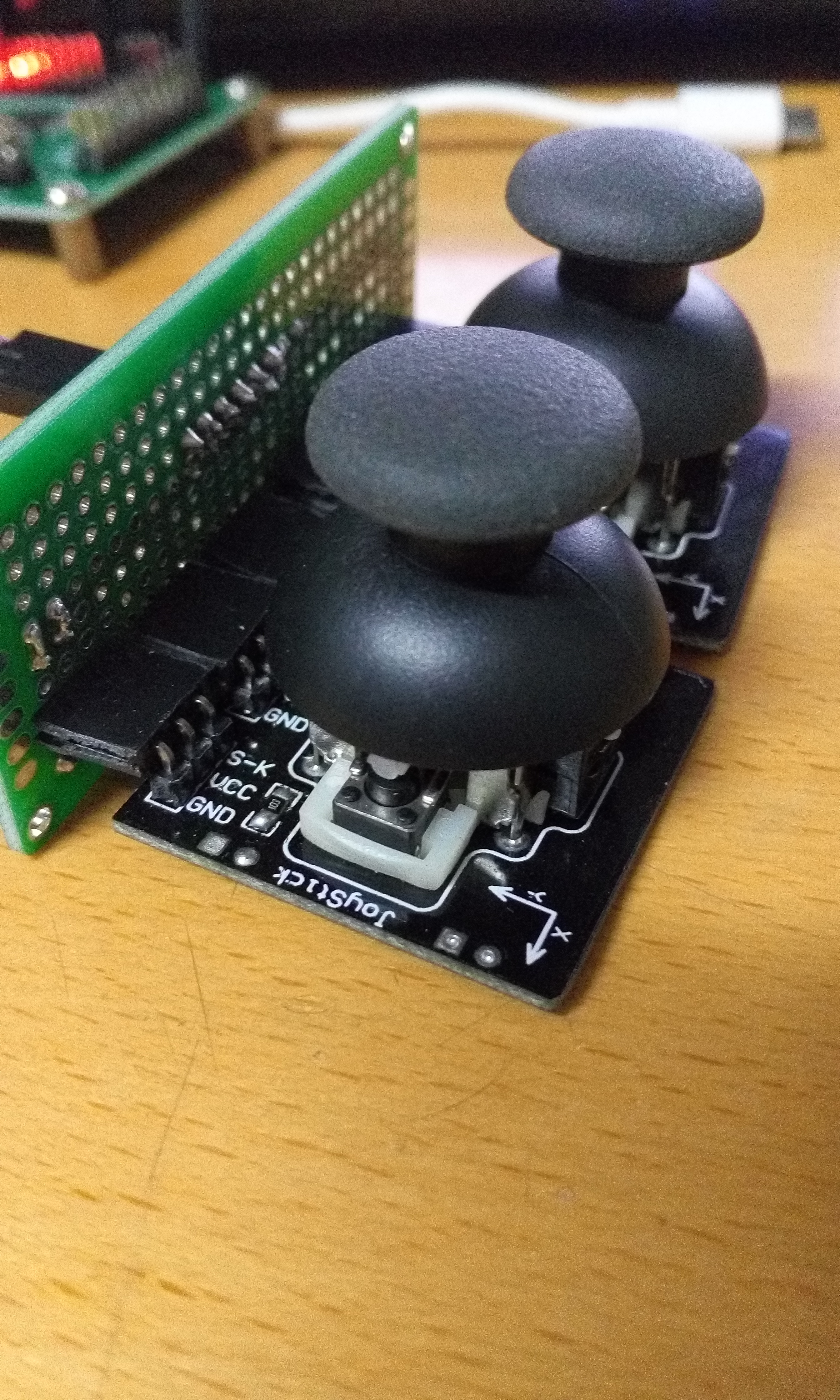
摇杆。。。苦逼的我只能用洞洞板来做转接板。。焊得好累。。

用蓝牙来连接小车,方便,快捷~ 这蓝牙长这幅样子我也不想的,只是之前的底版被我弄烧了,结果我发现主要模块还能用,就拆下来了
当遥杆处于直立状态时,阻值是最大阻值的一半,当按到x正方向最大值时阻值为0,x负方向按到底时阻值最大,y方向同。
这样我们就可以用stm32上的adc来读取遥杆通电后xy的电压值,就可以得到遥杆的状态了。
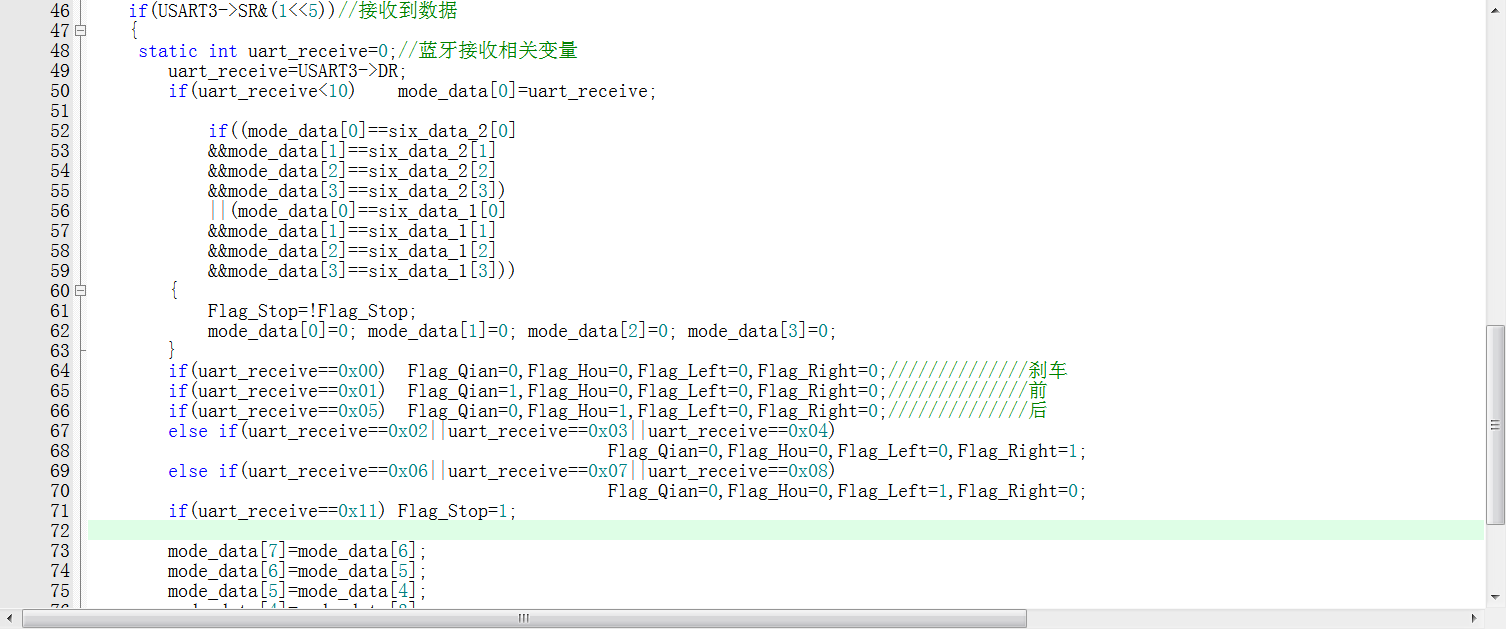
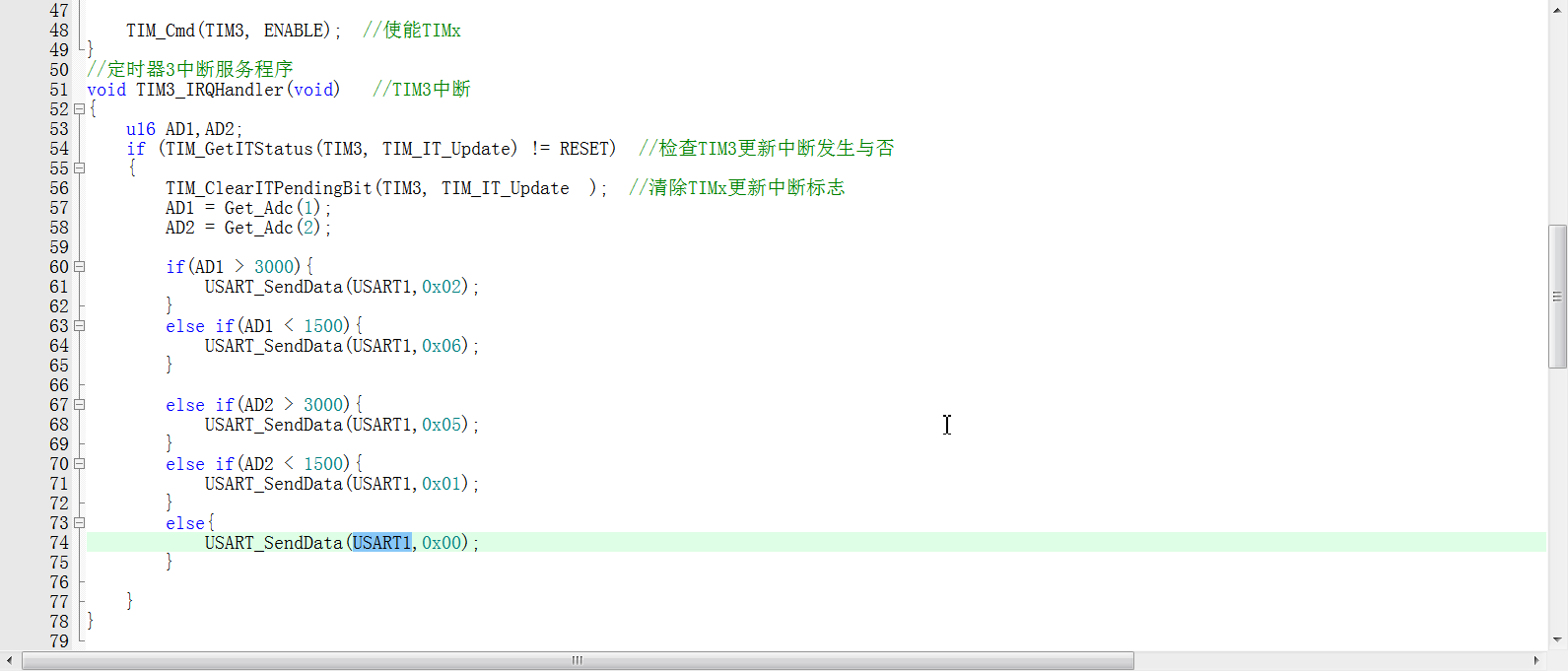
根据小车源程序的蓝牙控制的代码来编写控制端的代码,这里用的是PA0和PA1要读取XY方向的值。
哦。对了,记得把发送端的蓝牙调成蓝牙主模式,连接模式也要注意一下
遥杆在z方向还有一个按键,所以我就加了一个按下这个按键电机停转的功能
![]()

小车的代码里面有一个Flag_Stop标志位,当Flag_Stop == 1时小车就倒下了~
视频如下:
视频地址:http://player.youku.com/player.php/sid/XMTM1OTEwODg0MA==/v.swf
视频地址:http://player.youku.com/player.php/sid/XMTM1OTEwOTI1Ng==/v.swf
| 有奖活动 | |
|---|---|
| 【有奖活动】智能可穿戴设备AR/VR如何引领科技新潮流! | |
| 奖!发布技术笔记,技术评测贴换取您心仪的礼品 | |
| 【有奖活动】震撼来袭!这场直播将直击工程师的心灵! | |
| “我想要一部加热台”活动,不花钱赢取开发好工具!活动开始了哦 | |
| 【有奖活动】伙伴们:您的“需求”解决了吗? | |
| 打赏帖 | |
|---|---|
| 老胖子聊电路--分析一个反馈电路被打赏50分 | |
| 放大↔震荡被打赏50分 | |
| 【换取手持数字示波器】RTduino驱动ssd1306+sht31温湿度计被打赏40分 | |
| 【换取手持数字示波器】称植国产开源TobudOS到雅特力AT32F425被打赏40分 | |
| 【分享评测,赢取加热台】+Telink-泰凌微电子B91点灯篇被打赏20分 | |
| 【换取手持数字示波器】+精英板驱动LCD屏被打赏50分 | |
| 【换取手持数字示波器】+DFR0216全彩灯带WS2812示例分享被打赏50分 | |
| 【换取手持数字示波器】安装雅特力国产IDE-AT32IDE被打赏30分 | |
| 【换取手持数字示波器】+DFR0654板卡驱动数码管和串口功能分享被打赏50分 | |
| 【换取手持数字示波器】+DFPlayerMini模块推喇叭示例分享被打赏50分 | |




 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂