
1、准备
一台电脑、Linux操作基础
2、环境
操作系统:ubuntu14.04(indigo)
ROS版本:indigo
3、安装
第一步添加sources.list
我们直接添加国内的源吧,下载速度会快很多,完整版的包大小在1g左右
以下三个源,随便添加一个就可以了。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
第二步 添加keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
第三步确保你的软件包索引是最新的
sudo apt-get update
第四步安装
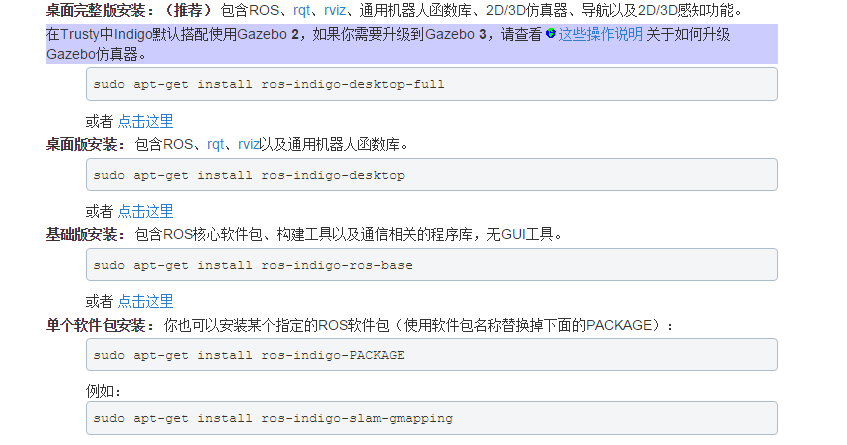
我们安装full这个
sudo apt-get install ros-indigo-desktop-full
然后就可以去喝咖啡去
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
第五步 初始化dep
首先输入
sudo rosdep init
然后输入
rosdep init
第六步 环境设置
如果不进行这一步设置的话,每次打开一个终端就需要source一下,很烦的
输入
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
然后source一下
source ~/.bashrc
第七步 安装rosinstall
这个玩意可以帮你给ros软件包下载很多源码树
sudo apt-get install python-rosinstall
安装结束了
我们可以测试一下安装是否正常,运行一个玩的吧,一个龟
打开一个终端(ctrl+alt+t)
输入
roscore
然后再打开一个终端
输入
rosrun turtlesim turtlesim_node
快看看弹出了什么
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂