2. 控制系统硬件设计
控制器硬件部分设计见图3所示,主要包括输入信号的采集调理模块、微处理器的接口模块、和对执行机构的输出控制模块。

图3 控制器的硬件模块
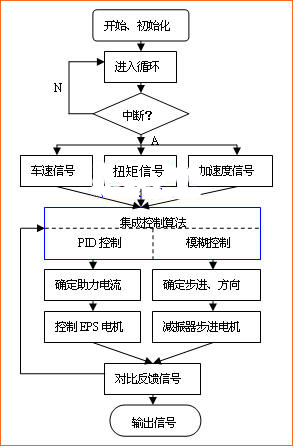
车辆正常行驶时,传感器采集控制系统外部的车身垂直振动加速度、转向轴转矩、车速等状态信号,经调理传送到控制器的电控单元ECU,ECU进行分析计算处理,产生控制信号传输给执行机构,执行机构按控制要求驱动悬架减振器的步进电机和转向系的直流电机,改变减振器的阻尼,同时提供转向助力,实现ASS和 EPS的协调集成控制。
控制器是集成系统的核心,微处理器MCU是控制器的核心,考虑到MCU的速度、集成的资源、输入输出口及其开发环境,本文选用SAMSUNG的 S3C44B0X作为控制器的微处理芯片。S3C44B0X 微处理器片内集成ARM7TDMI核[6],采用0.25umCMOS工艺制造,在ARM7TDMI核基本功能的基础上集成了丰富的外围功能模块,便于低成本设计应用系统。
在输入信号进入MCU之前,需要进行模数转换、电平匹配等信号调理。转向盘信号由转矩传感器提供,转矩传感器由滑块、钢球、环和电位器组成,用来获得转向盘操作力大小和方向信号,转换为电压值传递到MCU的AIN0和AIN1脚。MCU接收到主、副两路对称信号,采样时只需采用一 种电路。输入信号幅值为 0~5V,S3C44B0X的A/D转换器输入电压范围为0~2.5V,故需进行滤波和分压处理,如图4所示。采样滤波为二阶低通有源电路,阻值相同的 R1、R2先将输入信号分压,幅值变为原来的一半,然后与C1构成一阶低通滤波电路,R3与C2构成二级一阶低通滤波,运放起电压跟随作用。
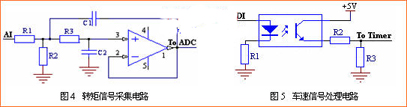
加速度传感器根据压电效应原理,加速度导致晶体变形,产生电荷改变,经电荷放大器放大滤波后经过通过二阶低通有源滤波电路,同图4,再进入模数转换ADC端口。MCU根据车身垂直振动加速度和车轮振动加速度的差值及其变化率进行进一步计算。
车速传感器位于变速箱上,根据车速大小产生成比例的信号,从车速里程表引出,为单极性脉冲信号,电压在9.5V以上,ARM能处理的信号电压为2.5V,所以车速信号的调理主要是信号的电平匹配,设计中采用光电耦合,见图5所示。车速信号DI经光耦转变为5V的脉冲信号,经同阻值电阻R2、R3分压后输到 ARM的计数器,经程序计算得到相应车速。
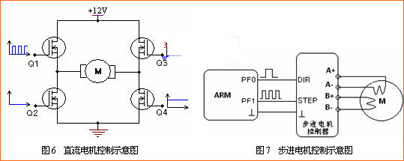
对执行机构的输出控制包括对EPS直流电机和减振器步进电机的控制。直流电机控制可分为励磁控制和电枢控制两种方法。这里采用开关控制方式驱动功率场效应晶体管,通过脉冲宽度调制PWM控制电枢电压实现转速控制。图6所示为直流电机控制示意图[7],定义ARM的端口PE3、PE4、PE5、PE6输出直流电机控制信号,经过四个驱动光耦分别加到四个MOS开关管Q1、Q2、Q3、Q4控制端。当要求电机正转时,Q1受PWM 信号控制,同时Q4被施加高电平导通,Q2、Q3被施加低电平截止;当要求电机反转时,Q3受PWM信号控制,Q2被导通,Q1、Q4被截止,方便实现了电机的方向控制和转速控制。


 (1)
(1)

 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂