
单独开帖,记录本次匠人DIY的过程
1、硬件篇 http://forum.eepw.com.cn/thread/273138/1
DIY组装 http://forum.eepw.com.cn/thread/273138/1 2-8楼
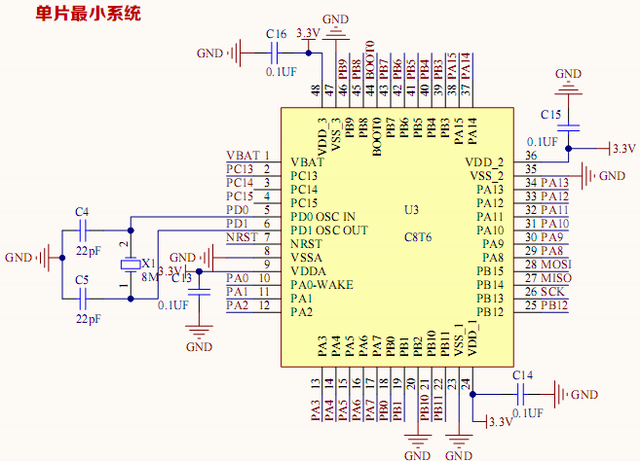
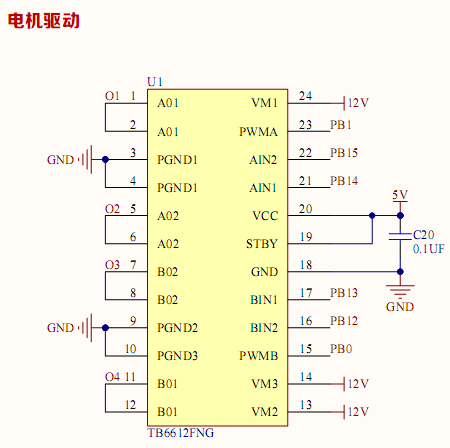
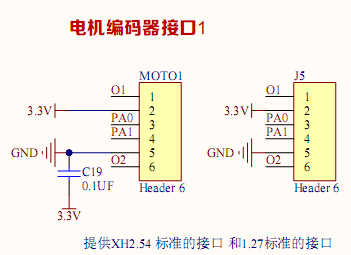
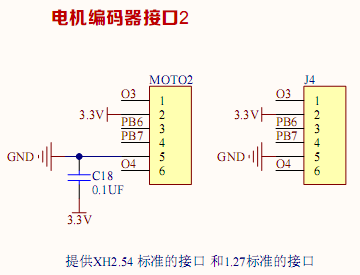
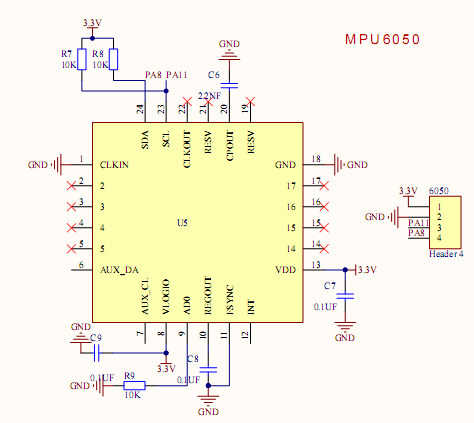
硬件原理图及其分析http://forum.eepw.com.cn/thread/273138/1 10-11楼
2、软件篇 http://forum.eepw.com.cn/thread/273138/2
PID测试试验: http://forum.eepw.com.cn/thread/273138/2 12楼
编码器接口试验 : http://forum.eepw.com.cn/thread/273138/2 13楼
电机PWM脉冲控制:http://forum.eepw.com.cn/thread/273138/2 14楼
系统定时扫描试验: http://forum.eepw.com.cn/thread/273138/2 15楼
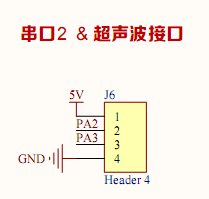
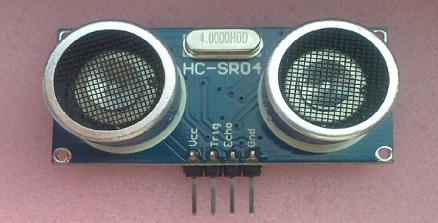
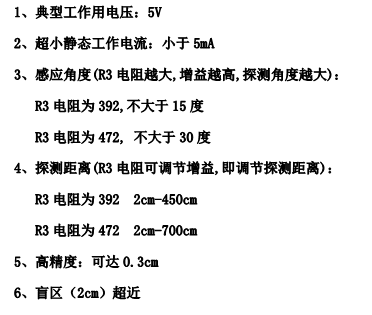
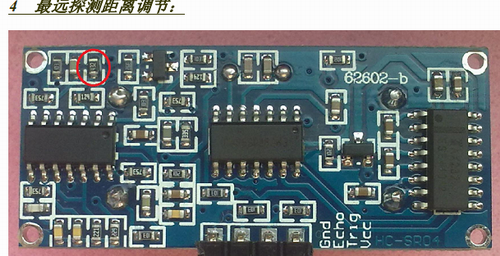
超声波测距试验: http://forum.eepw.com.cn/thread/273138/2 16楼
超声波避障试验: http://forum.eepw.com.cn/thread/273138/2 17楼
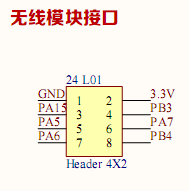
无线控制试验: http://forum.eepw.com.cn/thread/273138/2 18楼
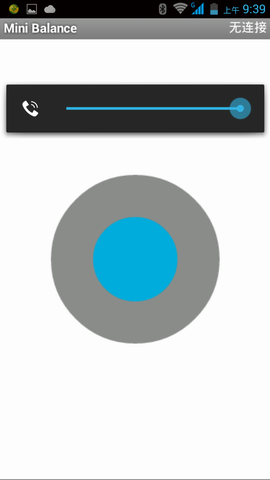
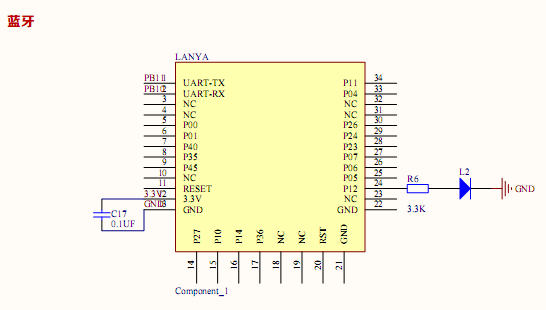
蓝牙控制试验:
3、调试篇
4、综合篇





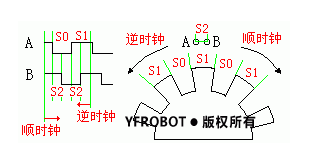 增量式旋转编码器
增量式旋转编码器
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂