
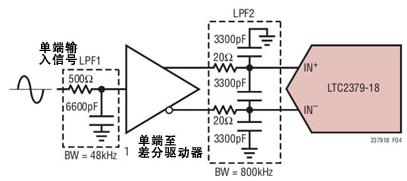
图 1:LTC237位 1.8Msps 差分输入 SAR ADC9 18 驱动差分输入 SAR ADC
很多性能最高的 SAR ADC 都采用差分输入,以最大限度地扩大低电源电压的动态范围。图 1 所示的 LTC2379-18 就是这样一个例子,该器件以 2.5V 电源和高达 5V 的基准工作,以实现 10V 的峰值至峰值差分输入范围。如果输入信号已经是差分的,那么要缓冲信号并驱动 ADC,全部所需也许仅是 LT6203 等低噪声、快速稳定的双通道运算放大器。这些放大器配置为单位增益缓冲器,为输入信号提供高阻抗输入端。 不过,在很多情况下,输入是单端的,而且必须转换为差分信号。用 LT6350 等放大器可以很容易地完成这个任务。这类放大器有两级:第一级产生一个缓冲非倒相输入信号,第二级产生倒相输出。如果输入信号已经与 ADC 的输入范围相匹配,那么这个放大器就可以如图 2a 上部所示,用来为信号提供一个高阻抗缓冲器。如果信号需要扩大并移位,以与 ADC 的输入范围相匹配,那么可以如图 2b 下部所示那样去做。在这个例子中,一个单端 ±10V 信号被转换成 0 至 5V 的差分信号 (R2 和 R3 用来给信号移位,RIN 和 R1 用来扩大信号)。在精确的模拟电路中常常忽视的事情是,增益设定和电平移位电阻器之间需要高度匹配。若采用 0.1% 准确度的分立电阻器,则具有将随着时间、温度和共模电压范围而变化的失配,其程度之甚使其很可能成为电路误差的主要根源。使用 LT5400 等精确匹配的电阻器将有助于减轻这个问题。 放大器在电源电压和输出电压之间需要空间。为了保持最佳的准确度和线性度,视放大器的不同而不同,输出一般必须在电源轨以内 0.5V 或更多。这意味着,必须给放大器提供比 ADC 输入范围宽的电源电压范围,或者 ADC 必须从放大器接受一个受限的输入范围。LTC2379-18 等 ADC 包括“数字增益压缩”功能,该功能从内部设定 ADC 的满标度与地及基准电压均相差 0.5V。这允许使用单一 5V 电源的放大器与 ADC 的满标度匹配。
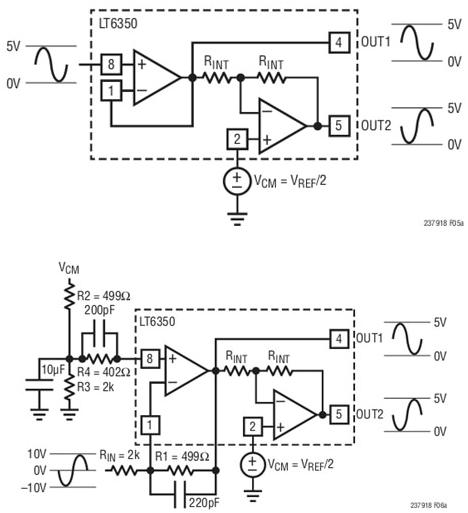 图 2:用 LT6350 进行单端至差分转换
驱动伪差分 ADC
图 2:用 LT6350 进行单端至差分转换
驱动伪差分 ADC将单端模拟信号转换为数字信号时,另一种方法是完全跳过差分转换,并使用新的 LTC2369-18 等伪差分 ADC。代价是,由于较小的输入范围,失去了多达 6dB 的信噪比。此外,差分架构天生更易于消除偶次谐波。不过,坚持使用单端架构也有一些重要的优点。驱动电路更简单:可以简单到使用一个诸如 LT6202 等低噪声快速稳定的运算放大器。不需要第二个运算放大器和电阻器来建立倒相输入。除了使用更少的组件,该电路的功率和噪声天生较低。因为一个较低噪声的抗混叠滤波器跟随在放大器之后,可以有更高的截止频率。
这使得放大器能够更容易地在 ADC 转换时间之内实现稳定,从而令其在逐次转换有可能在整个全标度范围内发生变化的应用中成为上佳的选择,正如与具有多路复用信号的场合一样。 需要再次强调的是,必须考虑放大器的空间 —— 电源电压必须距离可对信号进行无失真驱动的放大器输出摆幅足够远。在大多数情况下,这意味着,必须为放大器提供负轨。解决这个问题的一种方法是使用 LTC6360 等产品。这种新的放大器 (图 3) 为驱动 SAR ADC 而优化,具有一个集成的超低噪声充电泵,该充电泵产生自己的内部负电压轨。在仅用单一正电源时,这允许输出一直摆动到地,甚至比地低一点儿。LTC6360 保持卓越的准确度 (250µV 失调,2.3nV/√Hz 噪声),并可以快速稳定 (16 位,150ns)。

图 3:使用单电源时,LTC6360 摆动至真正的 0V 结论
可以使用几种放大器拓扑来驱动 SAR ADC。最佳选择取决于输入信号、ADC 输入架构和应用细节,例如输入信号是否是多路转换的。需要权衡的因素包括功率、复杂性、性能和速度 (转换速率和稳定时间)。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

