
放假呆在实验室了没啥意思,决定把MID的计划完成!搞了一整天!终于在晚上的时候实现了!下面介绍一下
接收端:
接收端最终还是选了STM32控制器!因为我以前参加比赛的时候刚好画过一款USB和无线功能的板子:
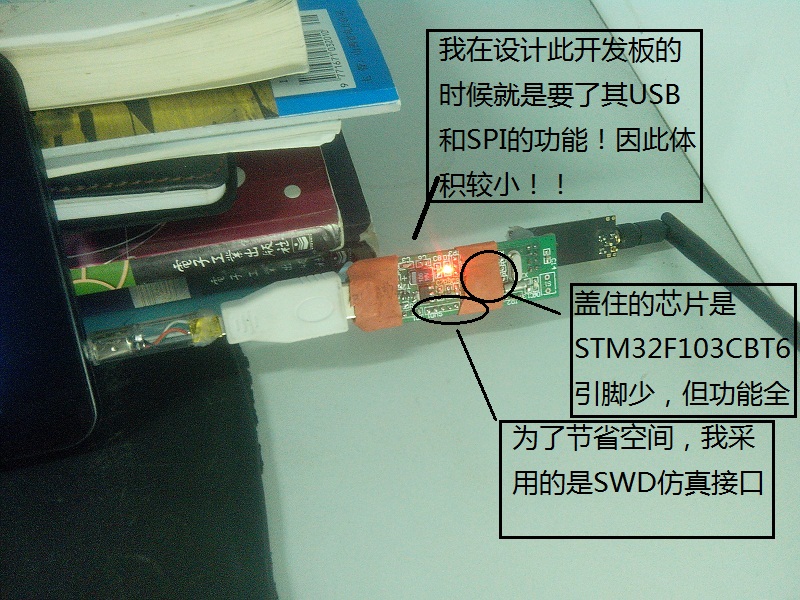
开发板的原理图很简单,就包含了USB和无线功能:
原理图:try4.pdf
PCB:
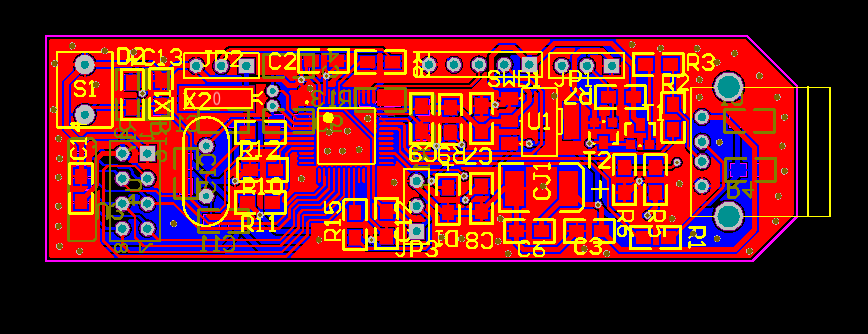
nRF24l01的资料就不必说了!网上一搜一大把!
发送端:
采用的是MSP-EXP430FR5739开发板,板载三轴加速度传感器!我给加了一个超声波测距模块!
具体资料我在瑞萨的活动中都有分享,就不再赘述了!
发送端的三轴加速度传感器,X轴和Y轴主要是测倾角,利用倾斜度来实现鼠标的八向移动!
而Z轴主要是利用向下甩动的时候的加速度值大于1g,来实现鼠标右键功能,在MID中主要体现在返回上一界面的操作!
而超声波测距模块则是实现鼠标的左键功能,按下,抬起以及长按的功能都可以实现!
这些命令打包之后通过无线发送到接收端,接收端枚举成功后实现界面的无线操控!

鼠标枚举:
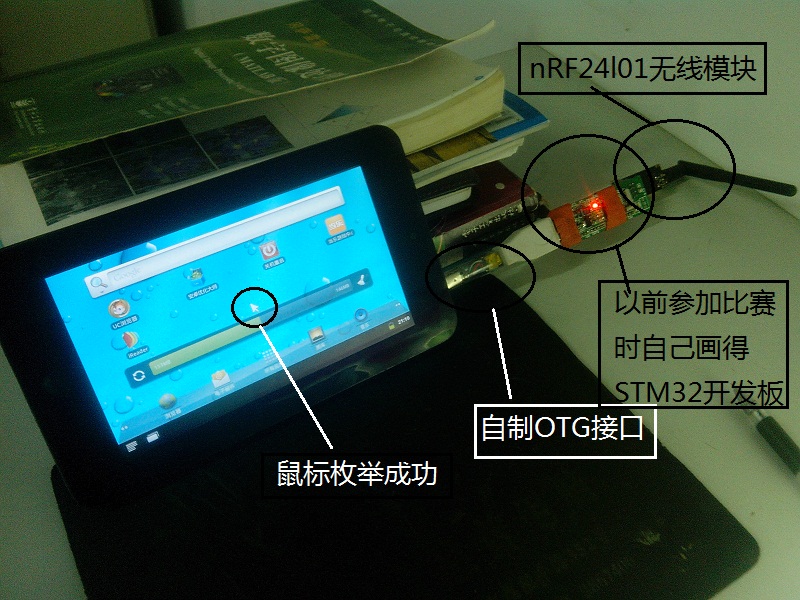
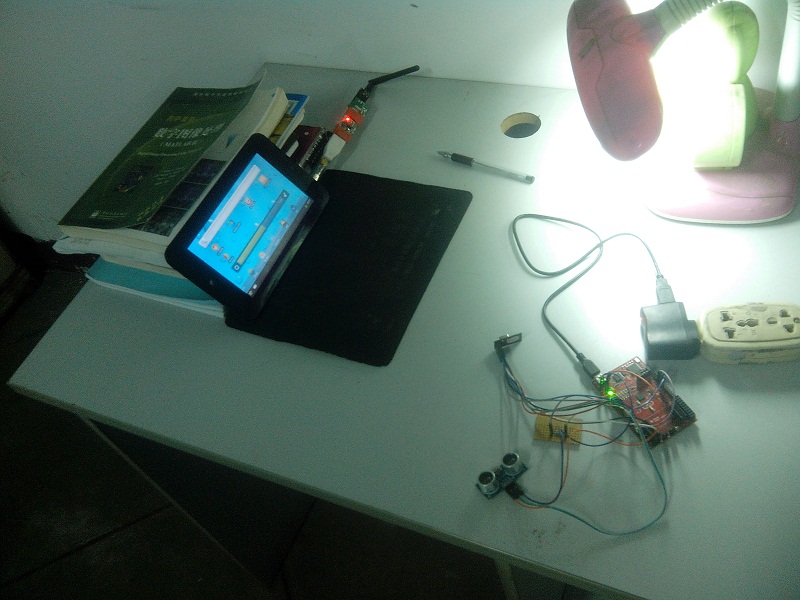
整体图:
最后是测试视频:
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

