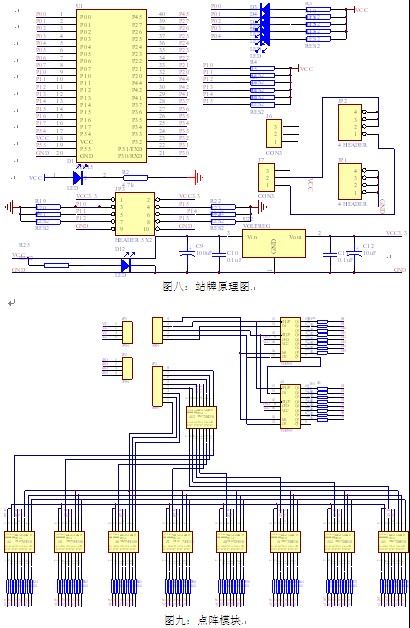
点阵原理:
8*8点阵的显示原理:
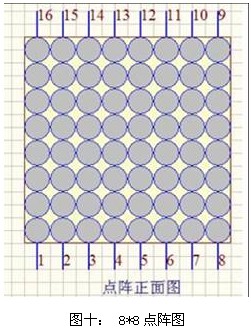
上图是8*8LED点阵,有16个引脚,上8个下8个。但是一般情况上8个8下并不是单独控制行或列,而是每8个有控制行的也有控制列的(即实际的脚和原理图并不是一一对应的)。所以首先要先确定每个引脚和原理图的哪个相应从图中可以看出Y0~Y7接电源的正极,X0~X7接电源的负极,连接电源的行列交叉点的LED会点亮。确定了点阵的各引脚定义后,接下来就是扩展了。这样连接后,左边的Y0~Y7就可以同时控制右边的Y0~Y7,上边的X0~X7就可以同时控制下边的X0~X7了,而不用去单独的控制每个点阵的行和列了。如此可以拓展下去了。
移位锁存器74HC595原理:
74HC595是具有8位移位寄存器和一个存储器,三态输出功能。 移位寄存器和存储器是分别的时钟。数据在SCHcp的上升沿输入,在STcp的上升沿进入的存储寄存器中去。如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(Ds),和一个串行输出(Q7’),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能OE时(为低电平),存储寄存器的数据输出到总线。
74HC138原理:
当一个选通端(G1)为高电平,另两个选通端(/(G2A)和/(G2B))为低电平时,将地址端(A、B、C)的二进制编码在一个对应的输出端以低电平译出。利用 G1、/(G2A)和/(G2B)可级联扩展成24 线译码器;若外接一个反相器还可级联扩展成32 线译码器。74HC138与74HC238逻辑功能一致,只不过74HC138为反相输出。
设计原理:
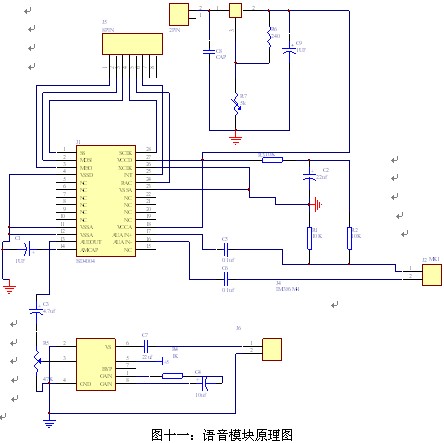
语音模块控制原理:
ISD4004的控制通过SPI串行接口实现的,SPI串行接口协议如下:
数据传输协议设定微控制器SPI的移位寄存器是有串行时钟SCLK的下降沿驱动。而对ISD4004数据输入是由MOSI引脚上的上升沿驱动,数据输出是由MISO引脚上的下降沿驱动。所有串行数据传送都是由/SS引脚上的下降沿开始。在所有串行通信期间,/SS引脚上都保持低电平,而在两条指令之间保持高电平。数据输入由时钟的上升沿驱动,数据输出由时钟的下降沿驱动。录音和放音操作的初始化是通过把/SS引脚为低电平使能芯片,把操作码和地址串行输入。输入操作码和地址的格式如下:<8位控制码>和<16位地址>每个由EOM或溢出产生的结果信号都将产生中断,包括报文周期插入周期。当下一次初始化SPI周期时,中断将被清除。当中断数据被移位移出MISO引脚时,控制和地址数据就同时被移进MOSI引脚。需要注意的是,移入的数据与当前系统的操作是一致的。有可能在同一个SPI周期读中断数据和启动一个新的操作。
任何一个操作都是从RUN位被置1开始,由RUN位清零结束。所有的操作都是有/SS的上升沿开始。SPI控制寄存器用于各个期间功能的控制,这些控制包括放音、录音、报文插入、上电和掉电、启动和停止操作以及忽略地址指针等。
GPS原理:
通过GPS获取车辆当前的定位坐标数据。公交系统实施智能化调度的关键是公交系统要采用GPS卫星定位系统技术,通过调度中心大屏幕显示的公交车运行状况,中心调度人员可实时监视所有受控公交车的具体运行位置、运行轨迹、行进速度及方向等有效信息。根据定时从GPS取到的定位数据,与数据库中的站点的基本信息进行对比,计算车辆位置。通过智能调度系统,指挥中心可以清晰地看到各路车的运行情况。
GPS定位的基本原理是根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法,确定待测点的位置。如图所示,假设t时刻在地面待测点上安置GPS接收机,可以测定GPS信号到达接收机的时间△t,再加上接收机所接收到的卫星星历等其它数据可以确定以下四个方程式:

上述四个方程式中待测点坐标x、 y、 z 和Vto为未知参数,其中di=c△ti (i=1、2、3、4)。di (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4到接收机之间的距离。△ti (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的信号到达接收机所经历的时间。c为GPS信号的传播速度(即光速)。
四个方程式中各个参数意义如下:
x、y、z 为待测点坐标的空间直角坐标。xi 、yi 、zi (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,可由卫星导航电文求得。Vt i (i=1、2、3、4) 分别为卫星1、卫星2、卫星3、卫星4的卫星钟的钟差,由卫星星历提供。Vto为接收机的钟差。由以上四个方程即可解算出待测点的坐标x、y、z 和接收机的钟差Vto 。事实上,接收机往往可以锁住4颗以上的卫星,这时,接收机可按卫星的星座分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用作定位,从而提高精度。由于卫星运行轨道、卫星时钟存在误差,大气对流层、电离层对信号的影响,以及人为的SA保护政策,使得民用GPS的定位精度只有100米。为提高定位精度,普遍采用差分GPS(DGPS)技术,建立基准站(差分台)进行GPS观测,利用已知的基准站精确坐标,与观测值进行比较,从而得出一修正数,并对外发布。接收机收到该修正数后,与自身的观测值进行比较,消去大部分误差,得到一个比较准确的位置。实验表明,利用差分GPS,定位精度可提高到5米。
nRF2401原理:
nRF2401无线收发一体芯片工作在2.4GHz自由频段,能够在全球无线市场畅通无阻。nRF2401支持多点间通信,最高传输速率超过1Mbit/s.nRF之间可以自由通信。通过无线模块的通信能够为公交车的实时行驶概况进行时时的检测和汇报。
NRF24L01是一款工作在2.4-2.5GHz世界通用ISM频段的单片收发芯片,无线收发器包括:频率发生器 增强型 SchockBurstTM 模式控制器 功率放大器 晶体放大器 调制器 解调器 输出功率频道选择和协议的设置可以通过SPI接口进行设置极低的电流消耗,当工作在发射模式下发射功率为6dBm时电流消耗为9.0mA 接受模式为12.3mA掉电模式和待机模式下电流消耗模式更低。全球开放ISM 频段,最大0dBm 发射功率,免许可证使用。空旷100米!支持六路通道的数据接收:
1.低工作电压:1.9~3.6V低电压工作。
2.高速率:2Mbps,由于空中传输时间很短,极大的降低了无线传输中的碰撞现象(软件设置1Mbps或者2Mbps的空中传输速率)。
3.多频点:125 频点,满足多点通信和跳频通信需要。
4.超小型:内置2.4GHz天线,体积小巧,15x29mm(包括天线)。
5.低功耗:当工作在应答模式通信时,快速的空中传输及启动时间,极大的降低了电流消耗。
6.低应用成本:NRF24L01 集成了所有与RF协议相关的高速信号处理部分,比如:自动重发丢失数据包和自动产生应答信号等,NRF24L01的SPI接口可以利用单片机的硬件SPI口连接或用单片机I/O口进行模拟,内部有FIFO可以与各种高低速微处理器接口,便于使用低成本单片机。
7.便于开发:由于链路层完全集成在模块上,非常便于开发。自动重发功能,自动检测和重发丢失的数据包,重发时间及重发次数可软件控制 自动存储未收到应答信号的数据包自动应答功能,在收到有效数据后,模块自动发送应答信号,无须另行编程载波检测—固定频率检测 内置硬件 CRC 检错和点对多点通信地址控制数据包传输错误计数器及载波检测功能可用于跳频设置可同时设置六路接收通道地址,可有选择性的打开接收通道标准插针Dip2.54MM间距接口,便于嵌入式应用。
设计方案:
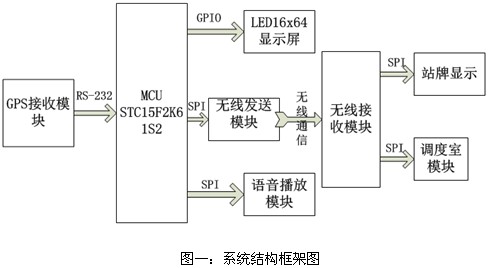
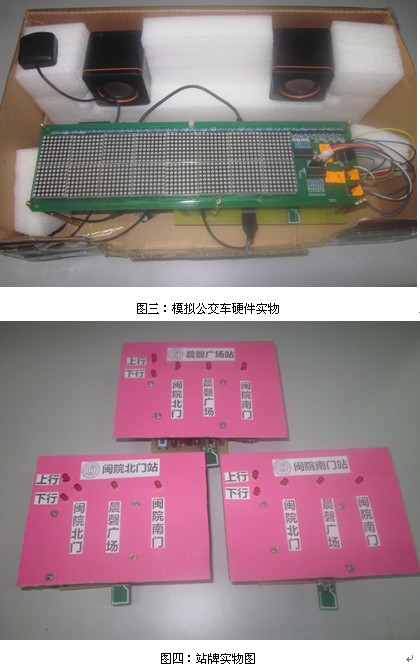
本作品用公交车、站点的站牌和调度室三个模块模拟现实公交车报站系统,通过车上GPS接收器捕获公交车实时的信息经过单片机处理后实现车上语音报站和点阵屏显示,再通过各个模块上的无线数据传输功能把公交车的信息传送到站台和调度室,进而等车的乘客可以在站台上得知公交车的信息,调度人员可以通过上位机在电脑终端了解到各个公交车的运行情况。
作品特色
在现阶段城市公交车报站系统大多数采用人工报站,在一定程度上影响了驾驶,所以在科技水平突发猛进的今天,公交车报站智能化亦是当今社会发展的趋势。本作品已基本实现通过GPS接收定位和2.4G无线射频的通讯,能够让驾驶员专心驾车、候车的乘客实时了解公交车行程动态,调度人员精确全面了解所有公交车整体运作情况。整个过程无需人为干预,完全实现智能报站的功能,从而大大减小的人力和物力。并且本作品各模块价格较低、使用方便、稳定性高,容易实现产品化。
整个系统包含GPS接收模块、ISD4004语音播报模块、点阵屏模块、上位机软件模块、nrf2401无线模块等组成。GPS 接收模块用于公交车在行进过程中,单片机自动匹配接收信息即可触发语音模块实现自动报站,还可实现在固定位置播放特定信息, 如乘车提示、广告信息等。点阵屏主要显示实时的公交信息。本系统另一个特色是采用无线传输技术,把公交车的实时位置信息传送到站牌和调度室,整个过程均无需人工干预,稳定性强。
系统演示视频:http://v.eepw.com.cn/video/play/id/2326


 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

