我想对大多数新手而言,拿到套件以后,都不知道该从哪里开始焊接起,而后就一团混乱,抓到什么就焊接什么,全部弄好就是了。这样做的后果就是,最后可能遇到什么小元件不太好焊,从而影响后面的进程。楼主觉得有个顺序进行焊接还是比较科学的,整理了下自己焊接的过程,分享出来。
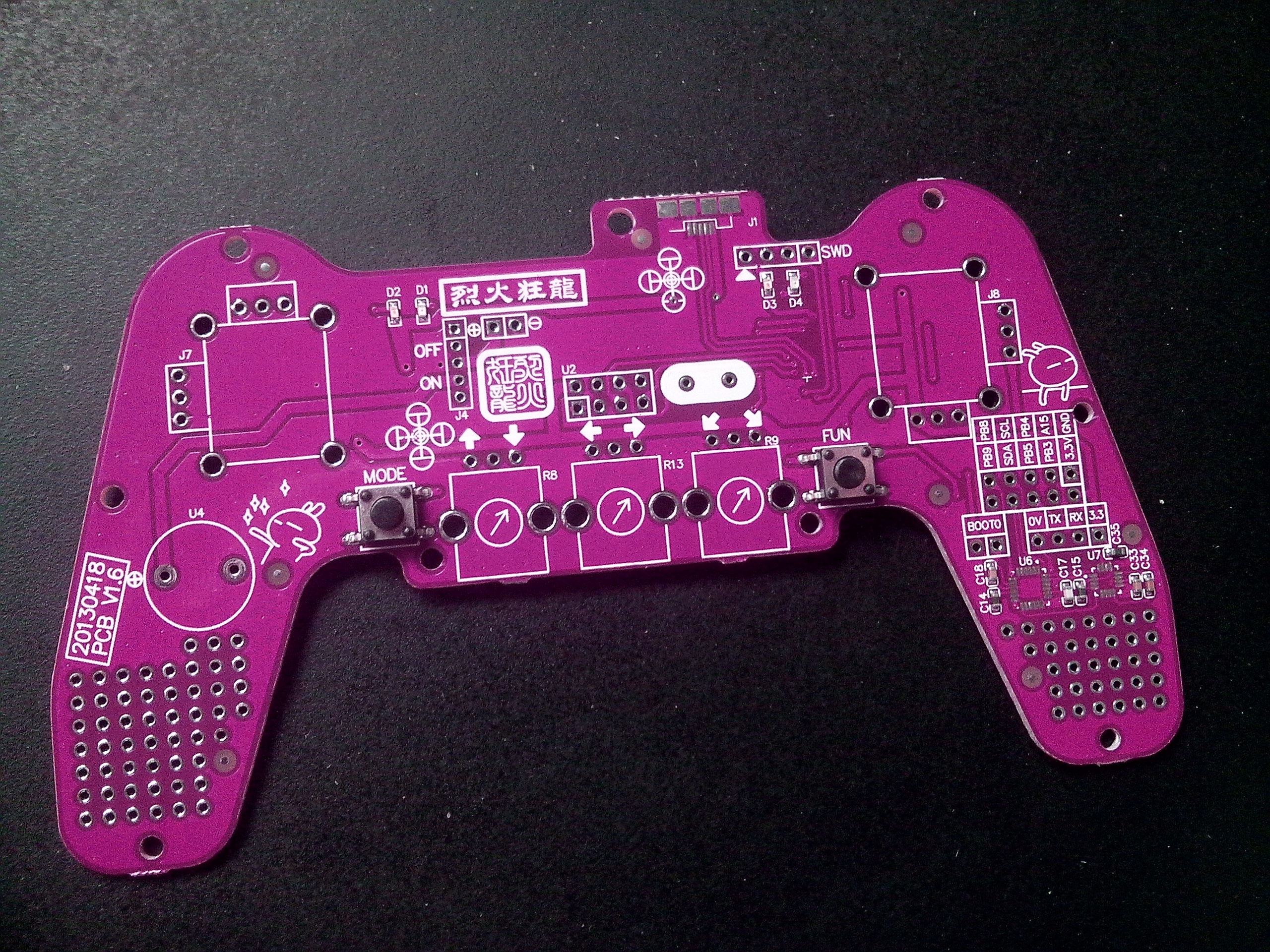
遥控器部分
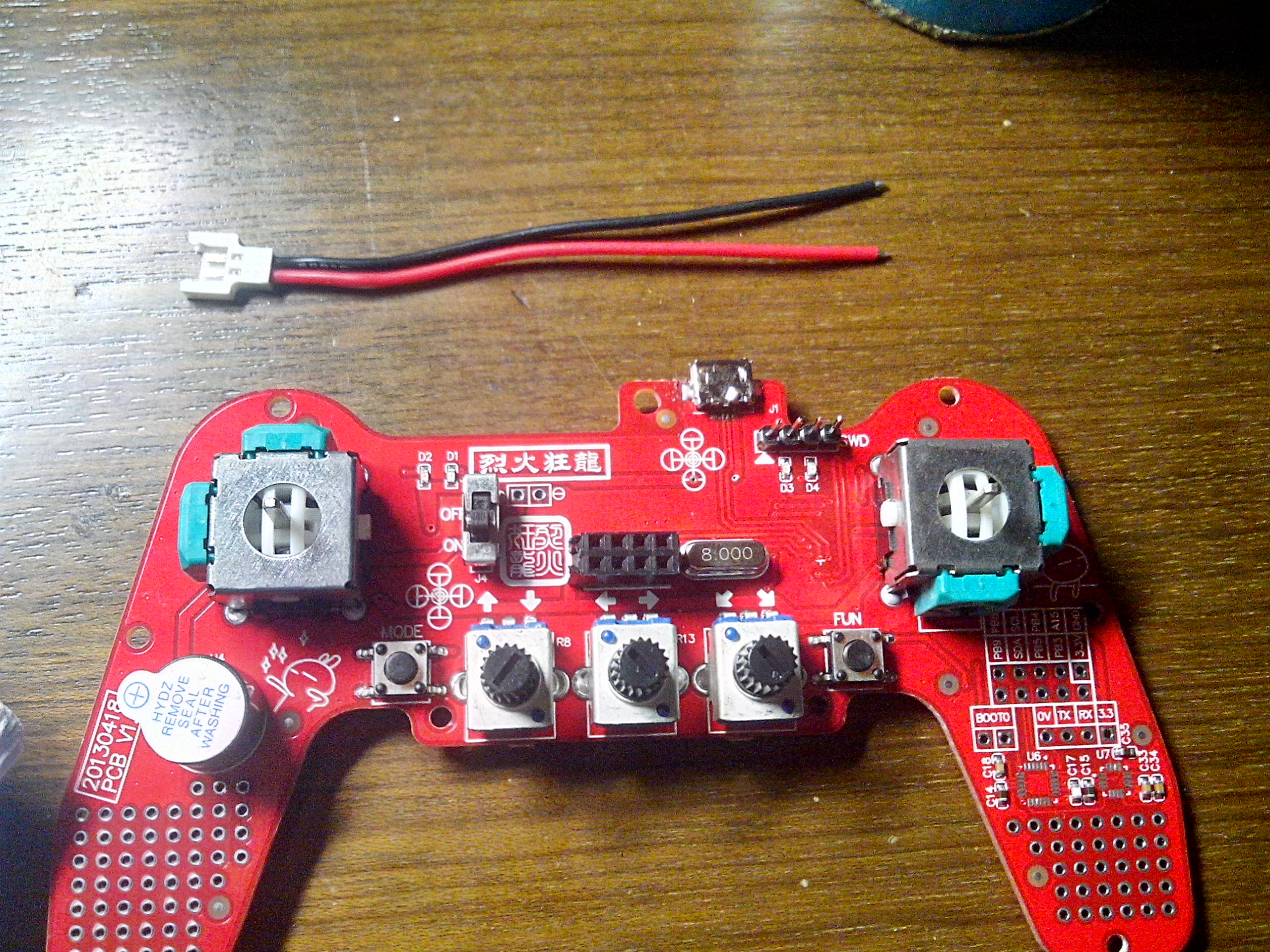
检查了下,遥控器上需要焊接的大概就是这些内容
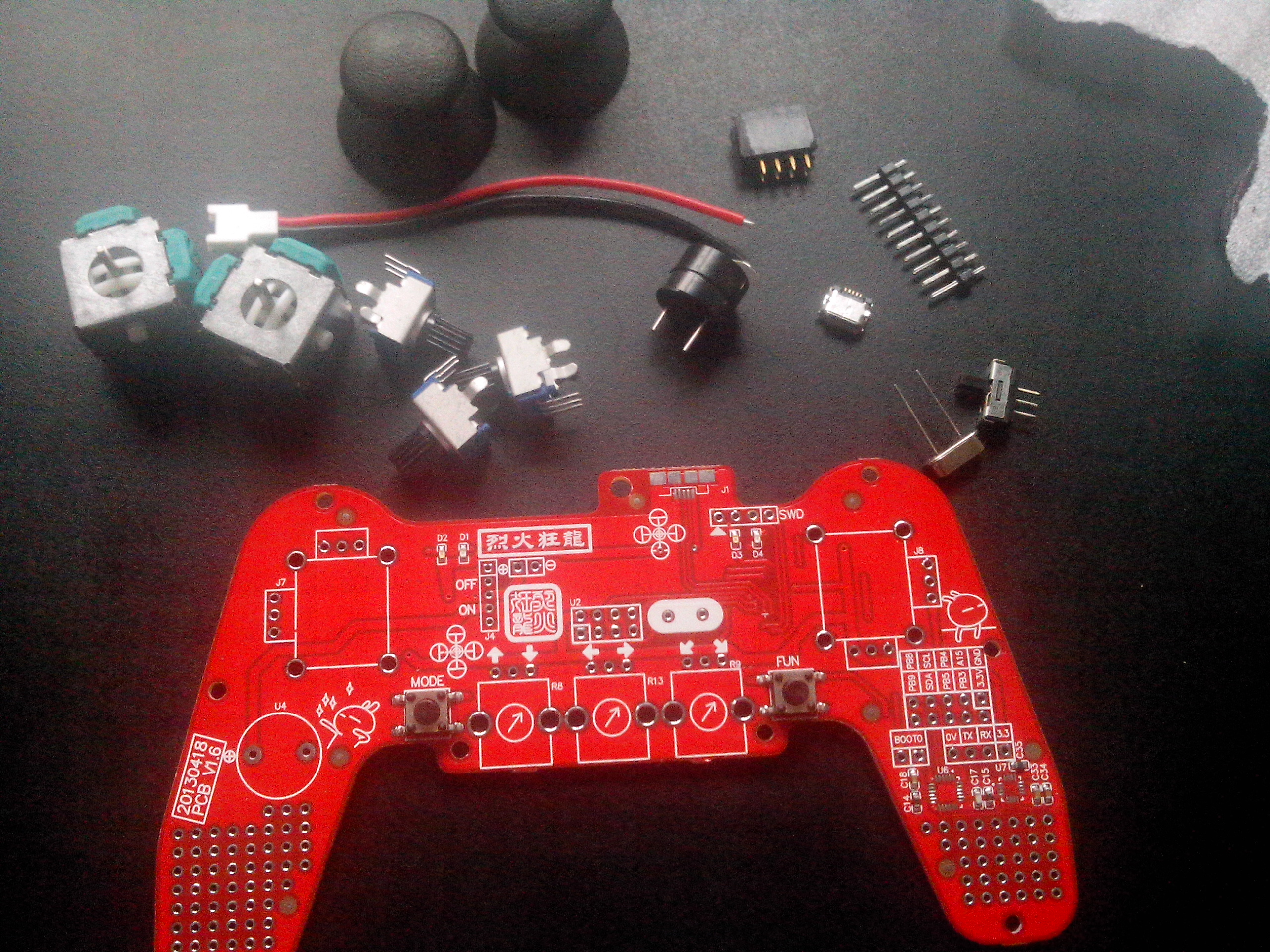
操纵杆2个,旋钮3个(实际上就是电位器),蜂鸣器,microUSB接头,排座,排针,开关,晶振,电池连接线。还有两个黑手柄是最后直接装上去无需焊接的。
焊接的顺序应该是由难到易,先焊接贴近板子的在焊接比较高的。所以推荐这个顺序进行焊接,这也是楼主自己的焊接顺序:
microUSB --- 晶振 --- 开关 --- 排针 --- 排座 --- 蜂鸣器 --- 电位器 --- 操纵杆 --- 电池连接线
1.microUSB

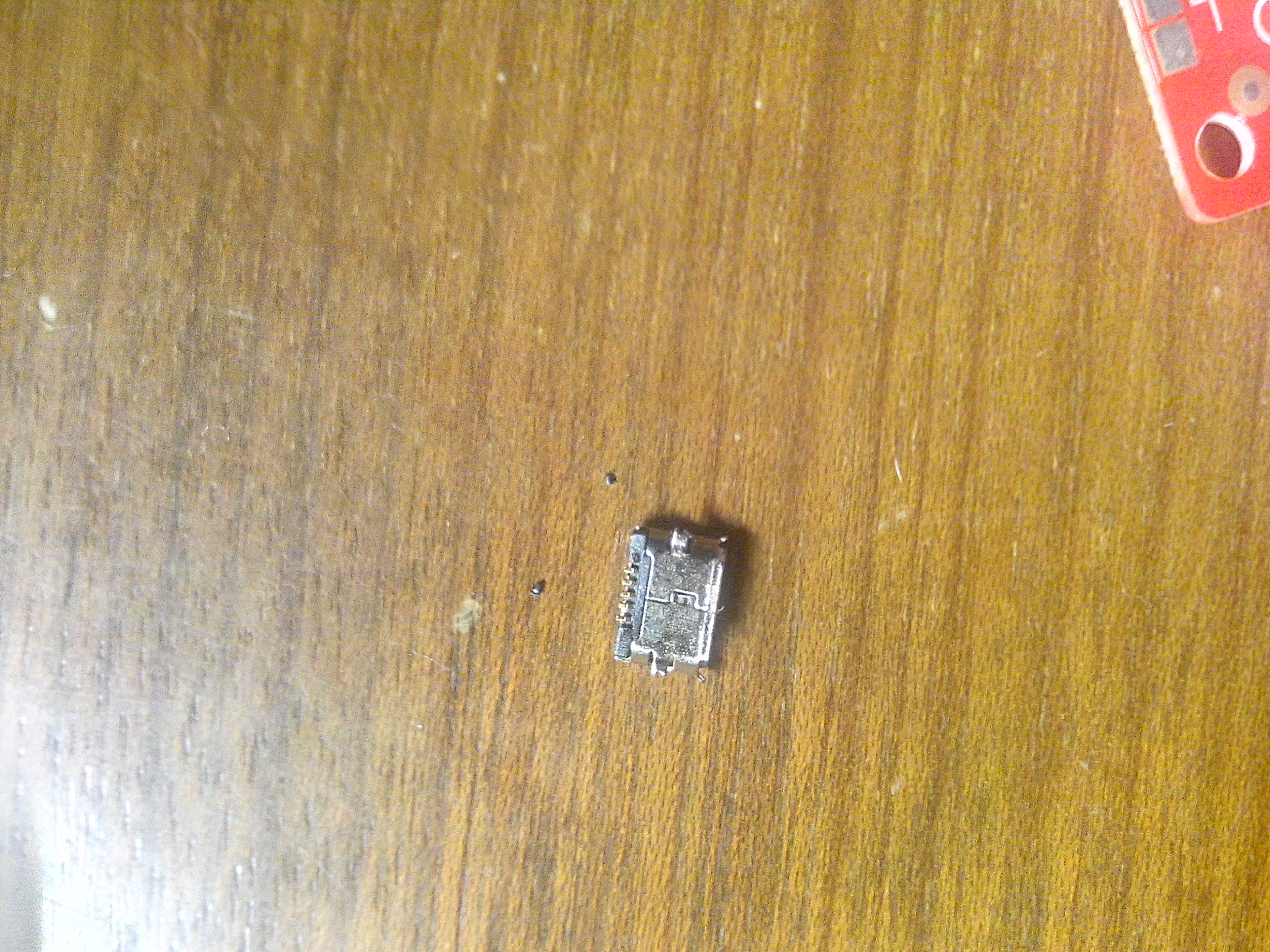
这个是最不好焊接的元件,引脚很近,有装备的最好能用热风枪。楼主只有渣烙铁,还是锈了的。。
图片拖出来看大图,microUSB上有两个小脚,先要把它们弄下来,不然放在板子上是不平的
让后在放到板子上的这个位置进行焊接

ok,焊接好了。
其实楼主第一次焊接已经是几乎完美了,但是总感觉好像有些引脚没接触好,就手贱了,后来焊锡都混在一起了,怎么捣鼓都弄不好了,挣扎了很久,终于把他们分开了,但是左边起第1脚第2脚还是连到一块了,这个还好,第二个脚是悬空的,但是3、4脚也连到一起了,不能再弄了,怕越弄越糟,全部不能用就惨了。所以这个usb口只能充电,不能用usb的功能了。

下次在手贱就剁手,此贴为证。
强烈建议新手在焊接的时候,如果装备不好的话,只焊接第1脚和第5脚,实现充电功能就ok,其他脚留空着,减少焊接难度。在以后的进程中也用不到USB功能,都是用串口来跟电脑连接。
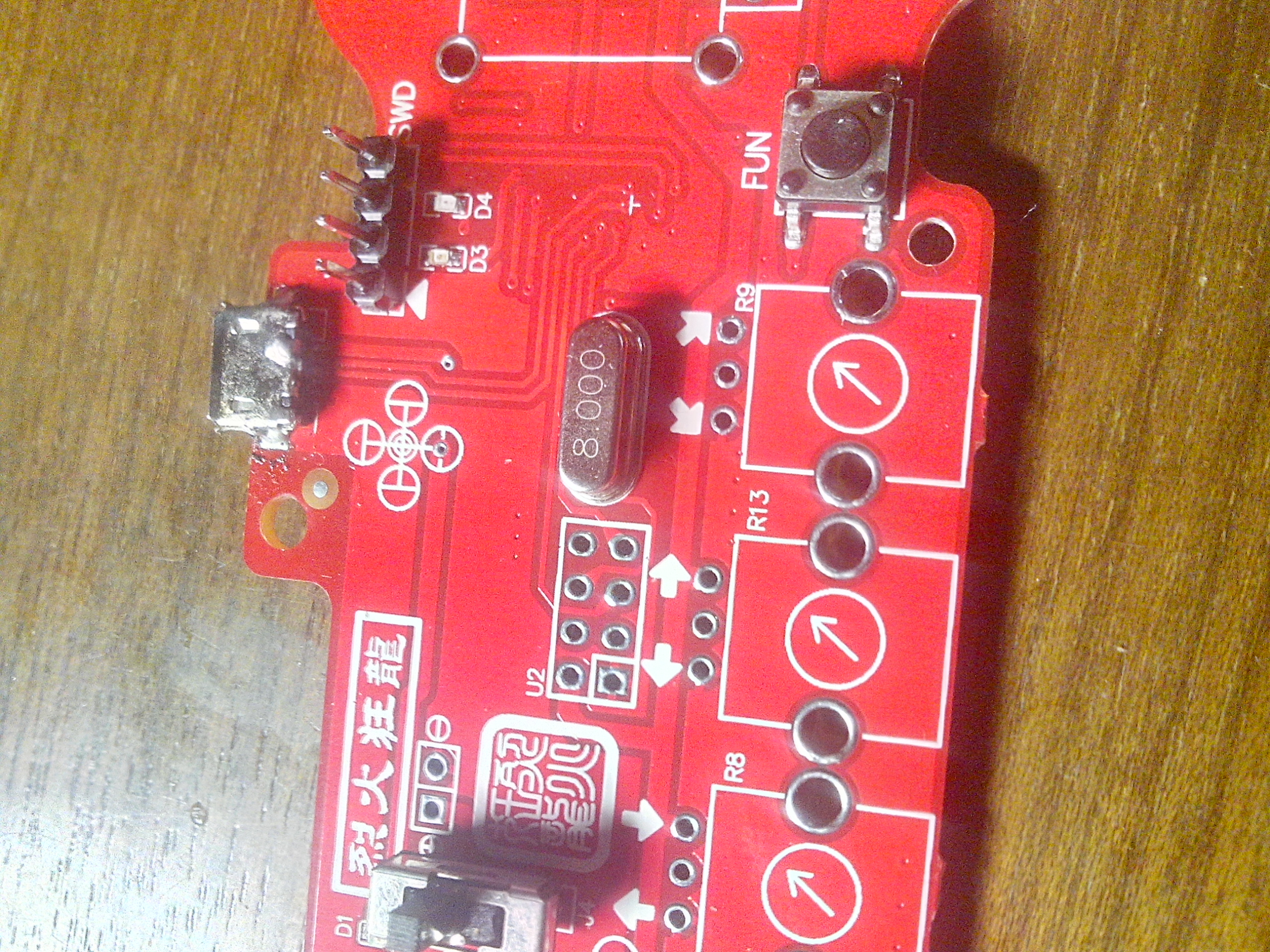
2.晶振

usb弄好后,后面的基本上没什么难度,都是直插元件。

搞定
3.开关
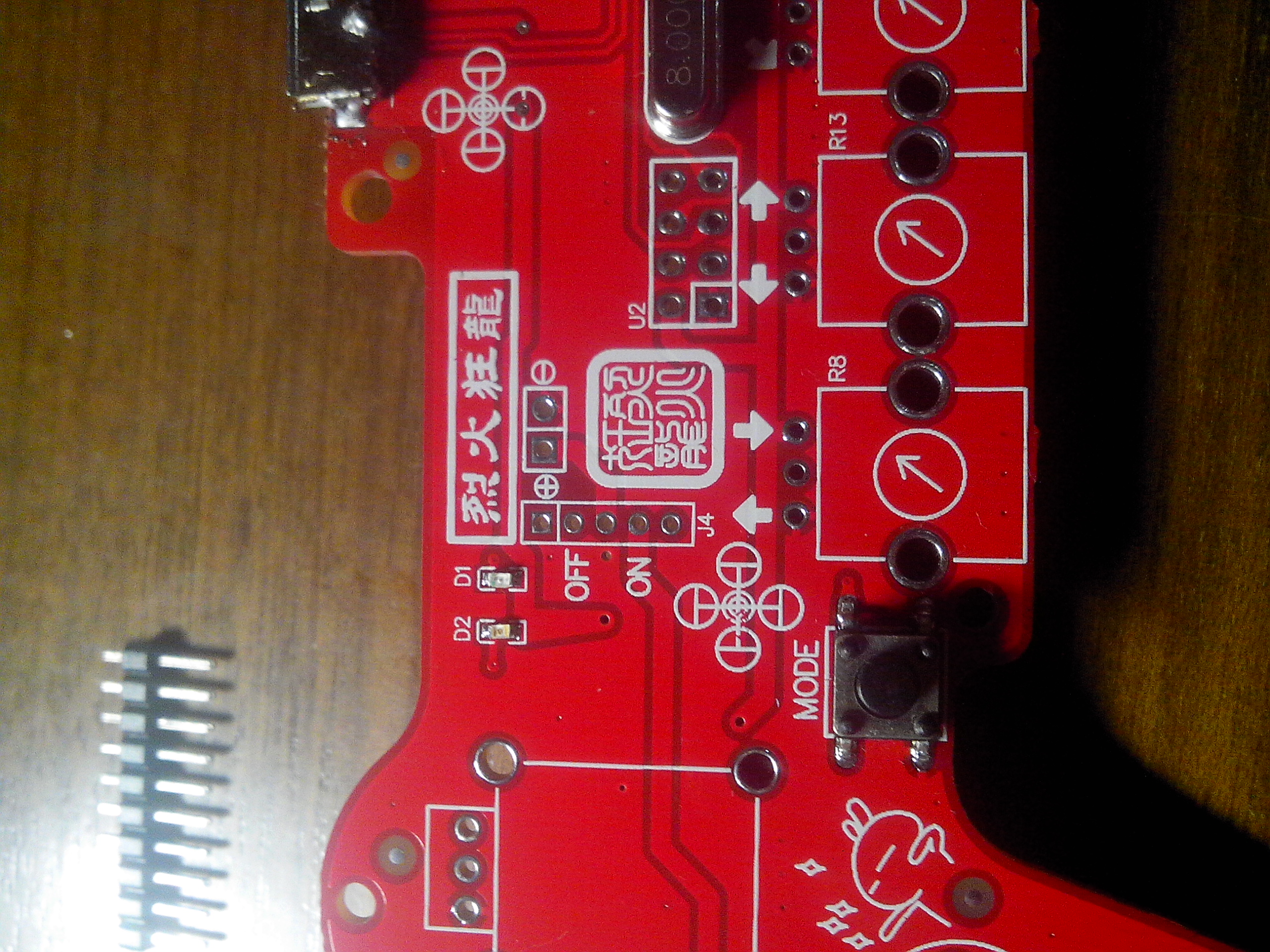
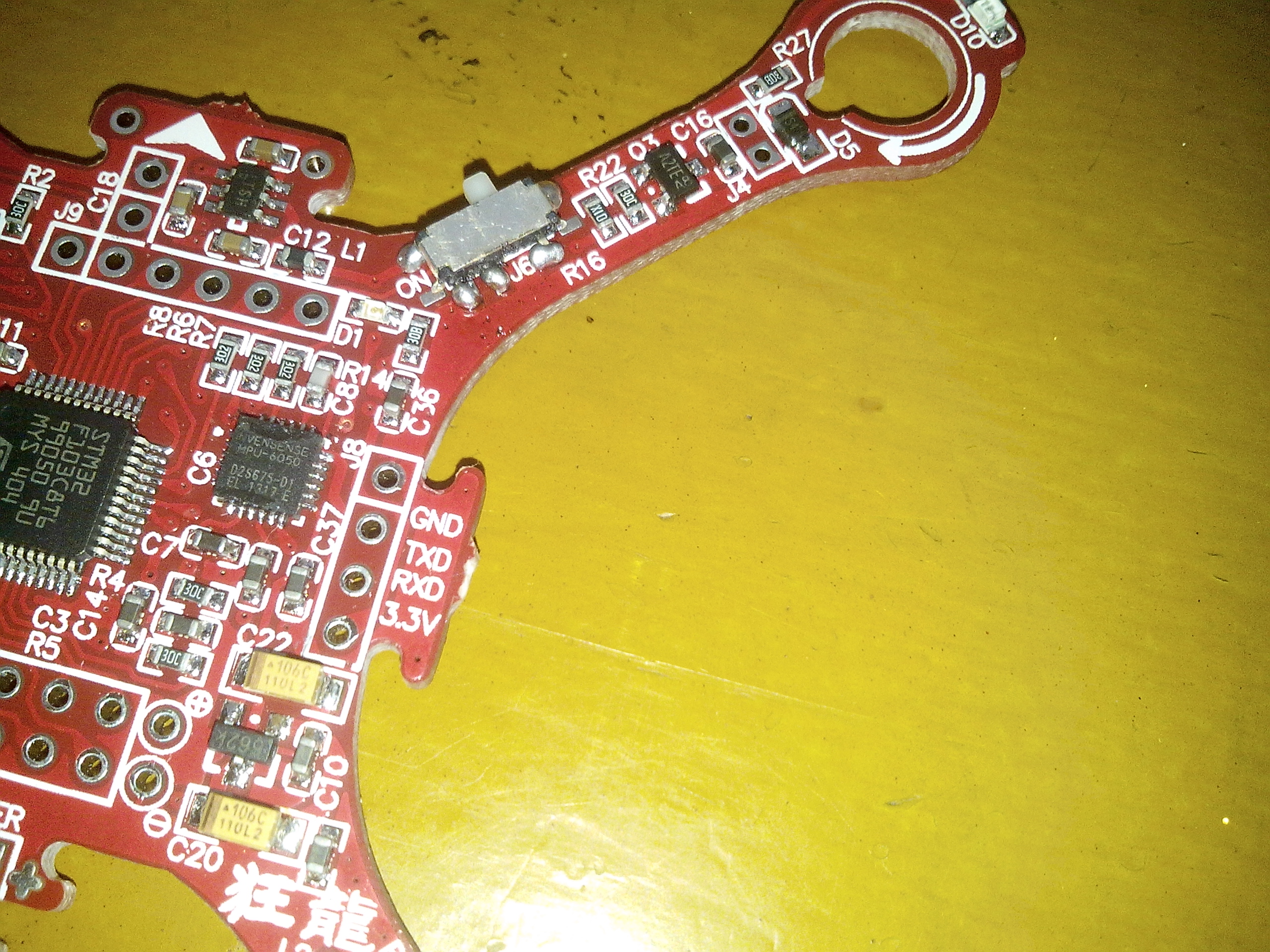
开关放这个位置,在J4的中间3个口,放上去后5个口都盖住了,正反没有关系
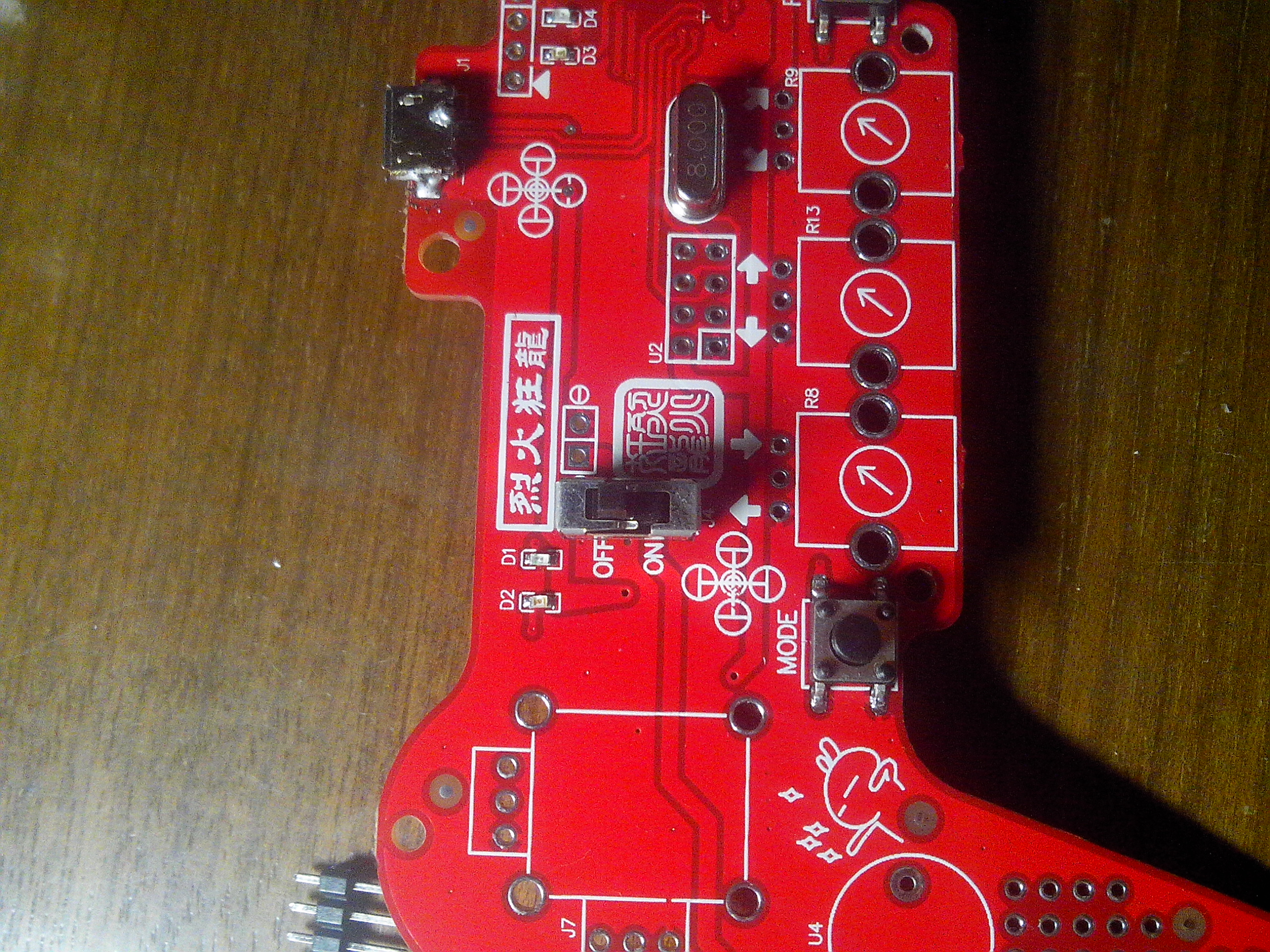
如图
4.排针
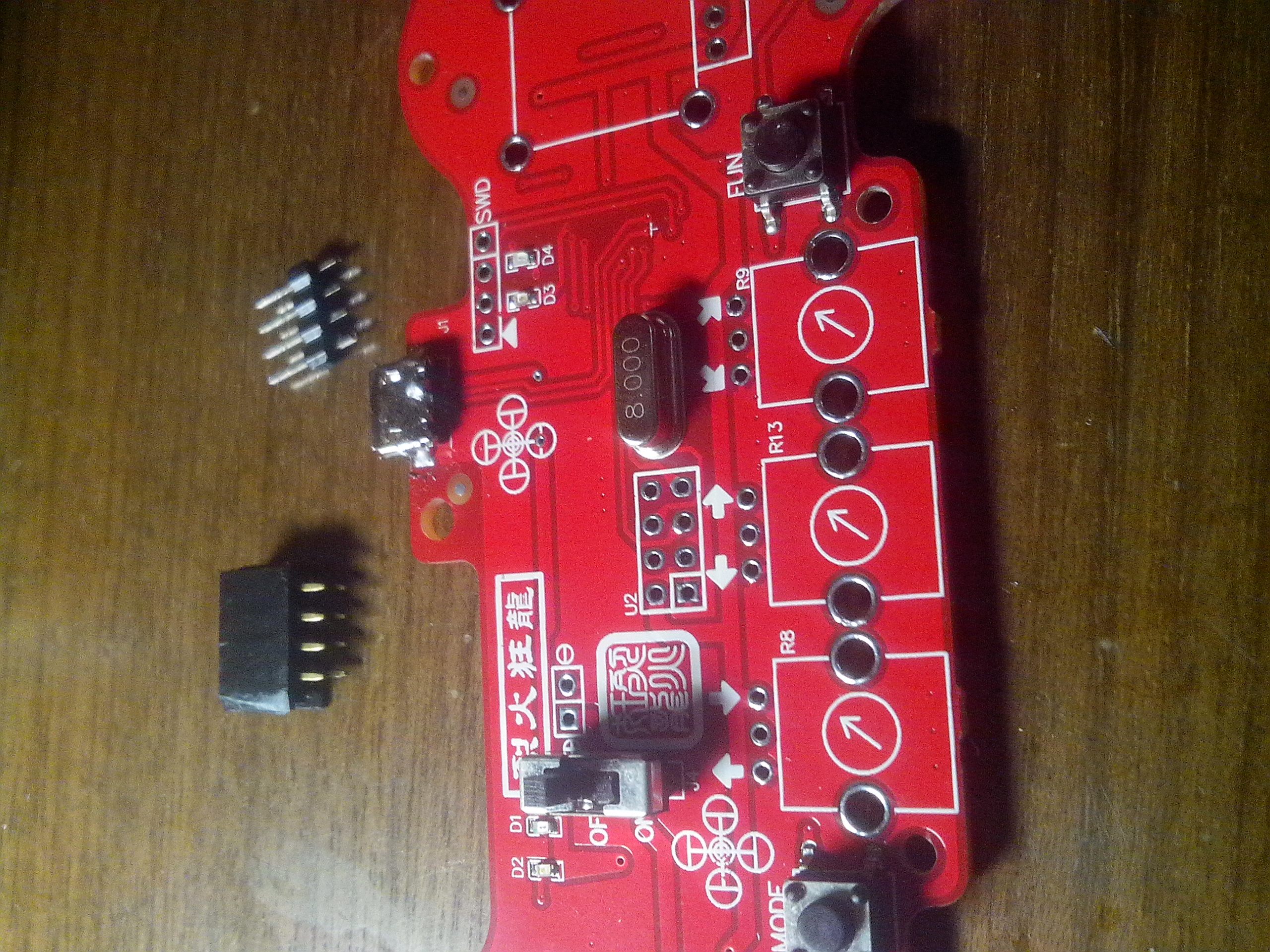
排针焊接到哪里,根据自己的个人编程调试方案,楼主使用Jlink来调试的,所以就焊接到swd口了,如果用串口调试的就焊接到右下角的0V,TX,RX,3.3这几个口,串口调试的话还要焊接boot0。当然如果自己有多余排针,两个都焊接上也没有问题。
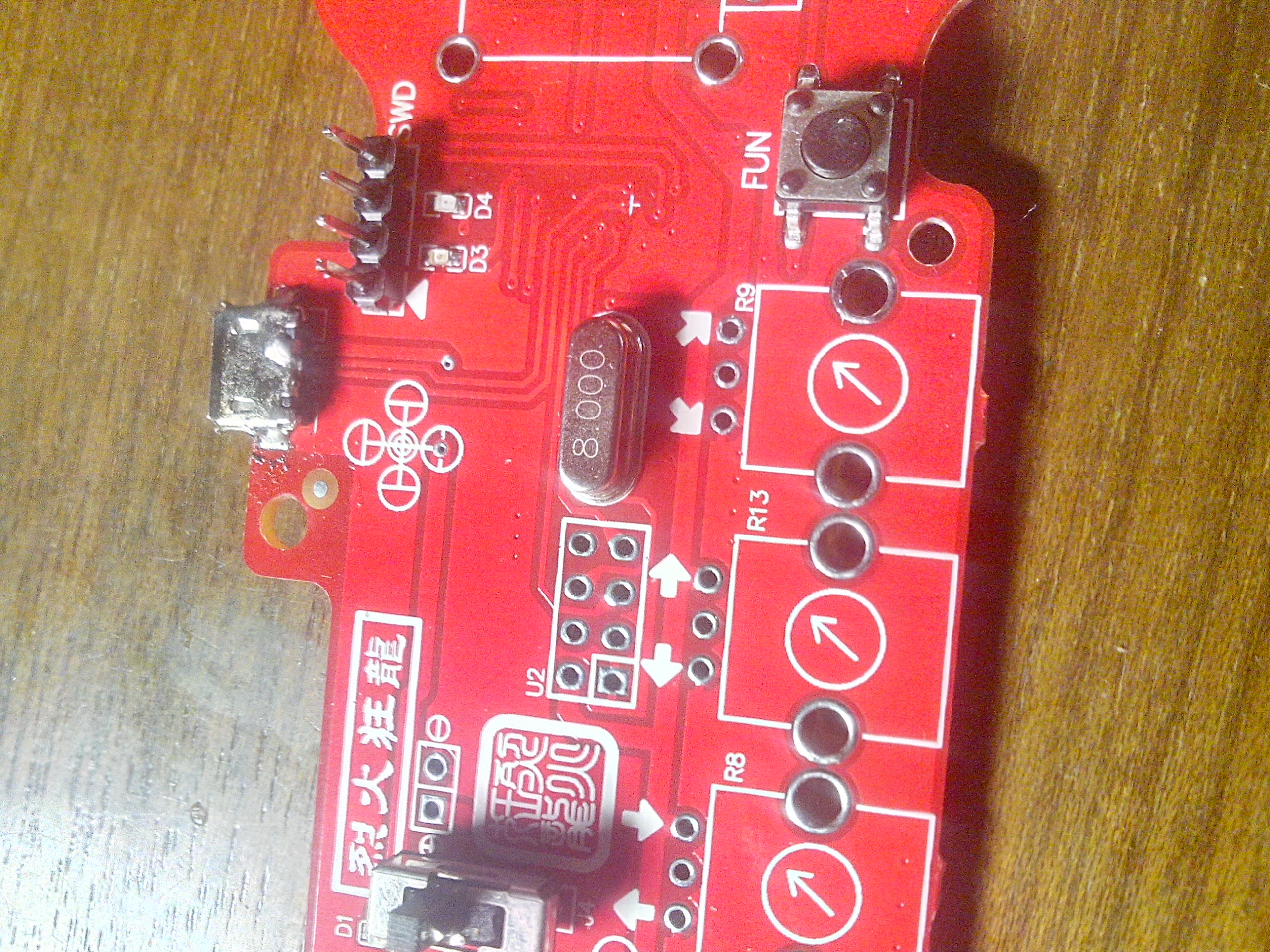
排针ok
这里一个问题:楼主没有焊接串口排针,要用串口跟电脑通信怎么办?用公头杜邦线就可以了,公头杜邦线插上,稍微往一侧偏一点,通信是没有问题的,板子上就不需要焊接那么多排针了。
5.排座

不得不吐槽一句,没有4*2的排座了么
这个位置

排座ok
排座放这儿是用来连接nrf24l01无线模块的

好吧,实际上是这个颜色的

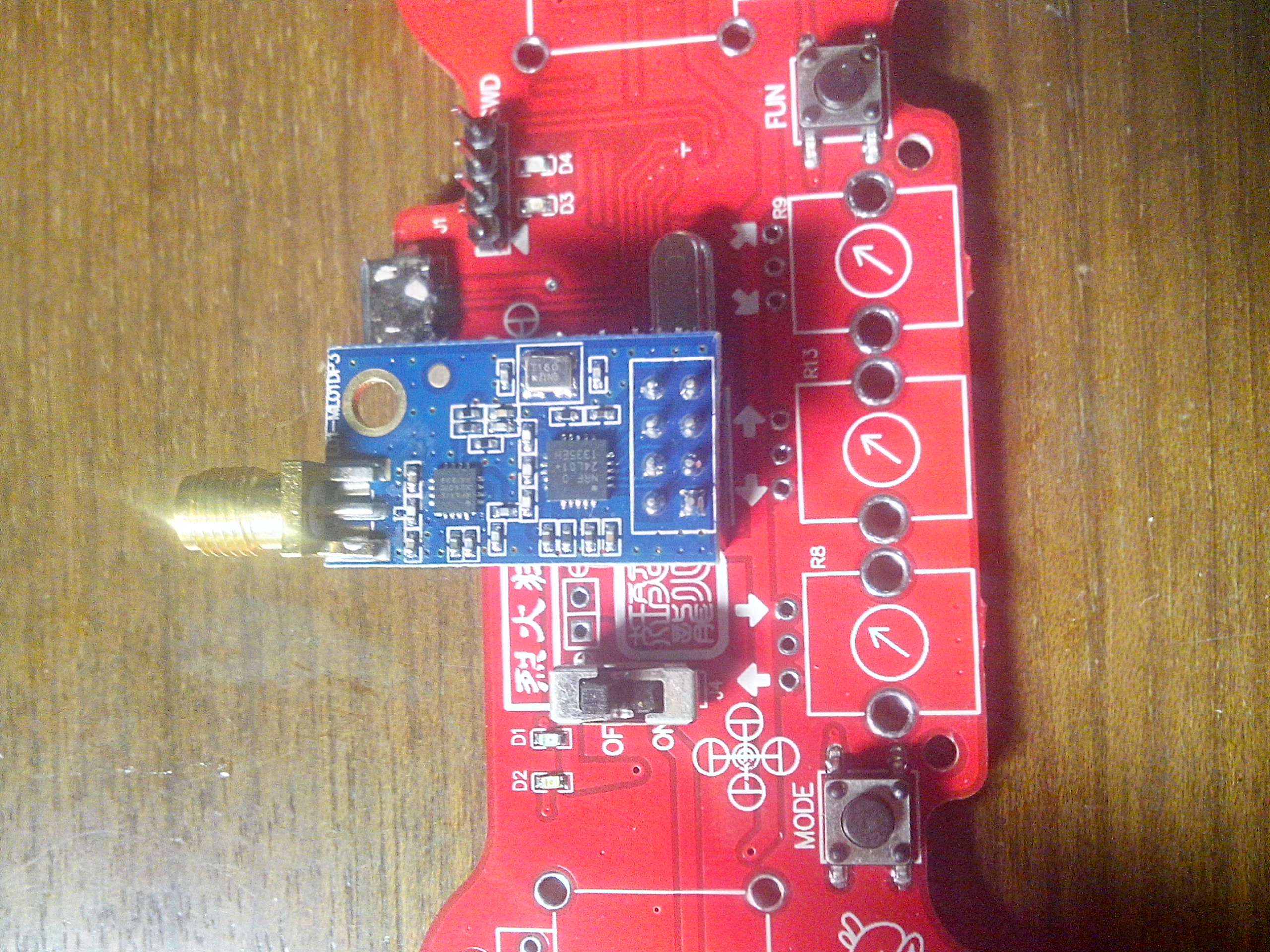
正方向是这样
6.蜂鸣器

注意这个蜂鸣器是区分正极负极的,看贴纸上,有个加号的那一边是正极,另一边是负极,焊接反了的话是不会响的。

要是贴纸撕掉了,可以看引脚来确定正负极,长脚的一边是正极,如图。
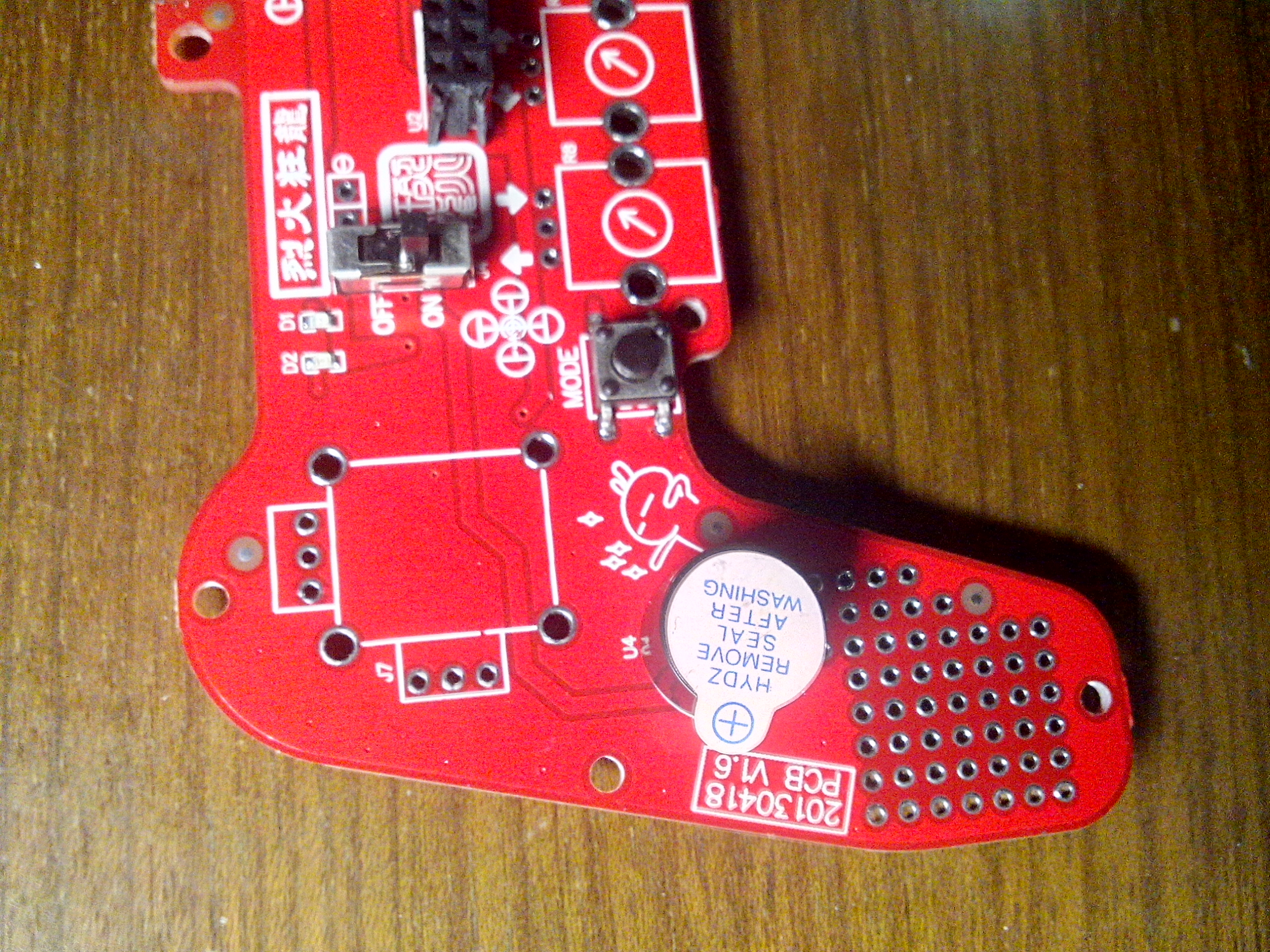
蜂鸣器ok
7.电位器

电位器焊接到图中3块大些的区域上
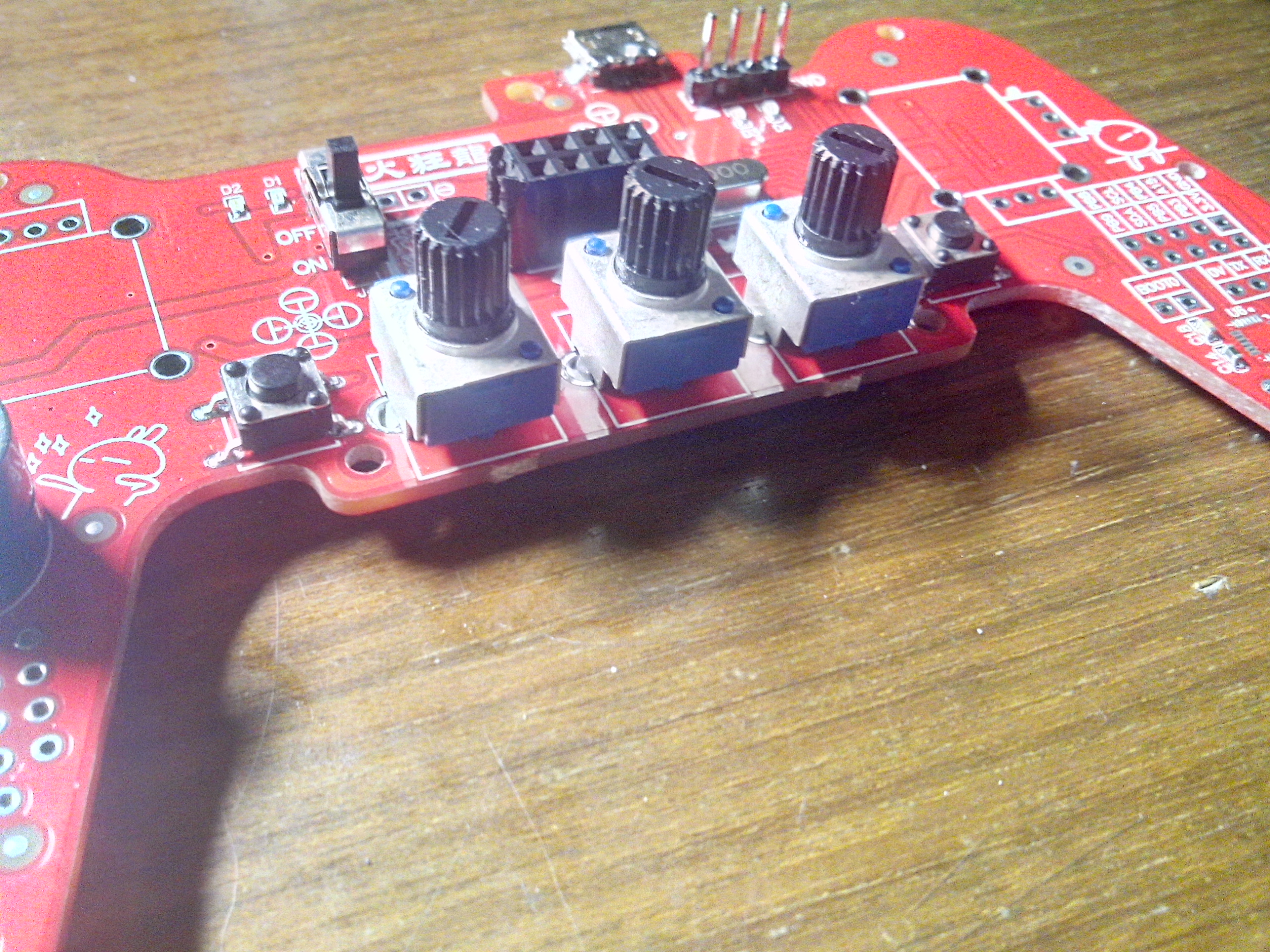
如图,电位器ok
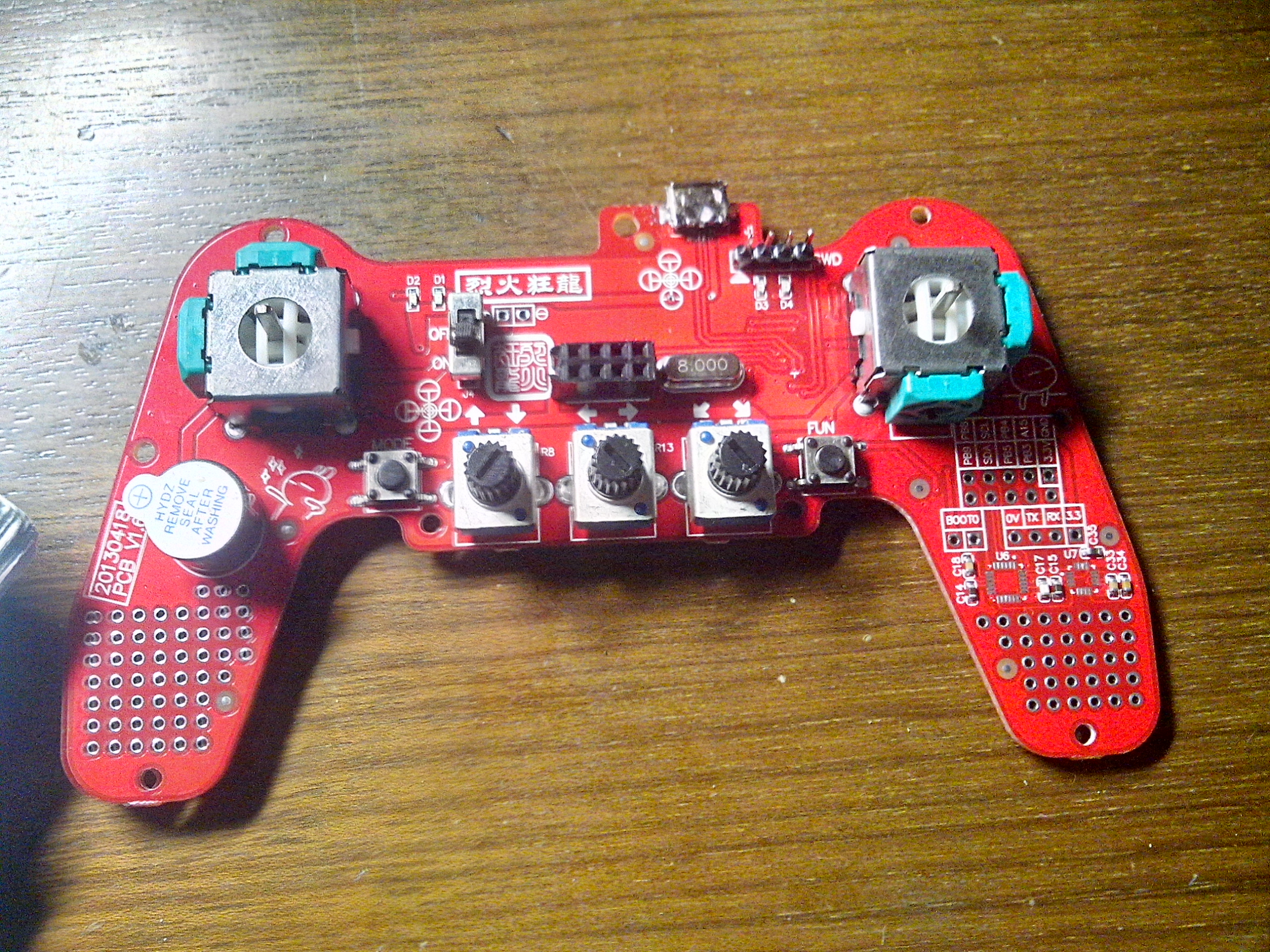
8.操纵杆
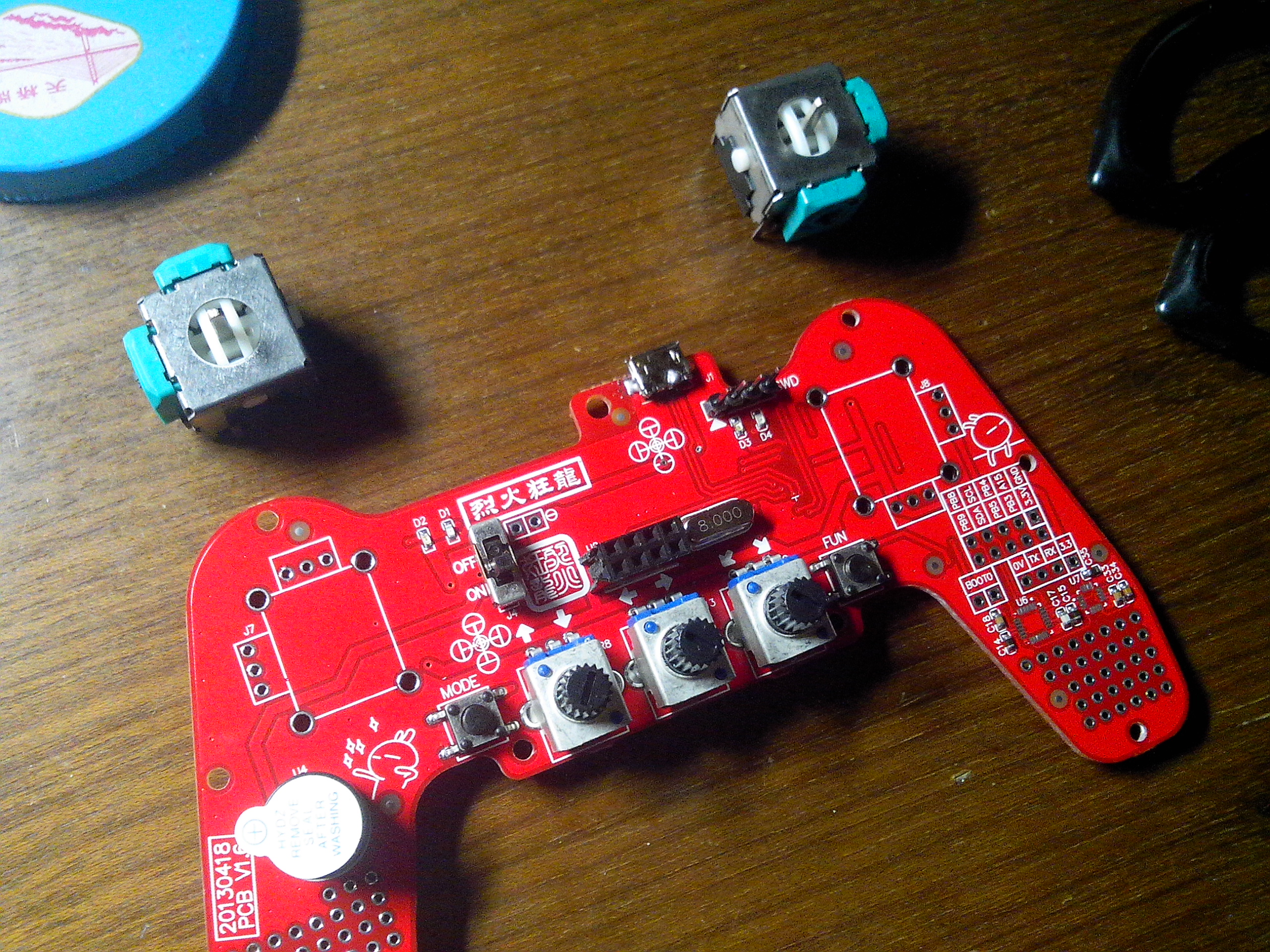
最大的家伙了,焊接到板子上一左一右的位置

多加些焊锡,弄牢固点,不然遥控中途突然脱了就不好了
操纵杆ok
9.电池连接线
电池连接线,焊接到开关旁边的那两个口子里面,红色正极,黑色负极
这里可以选择焊接到正面或者到反面,根据个人偏好,楼主选择焊接到反面
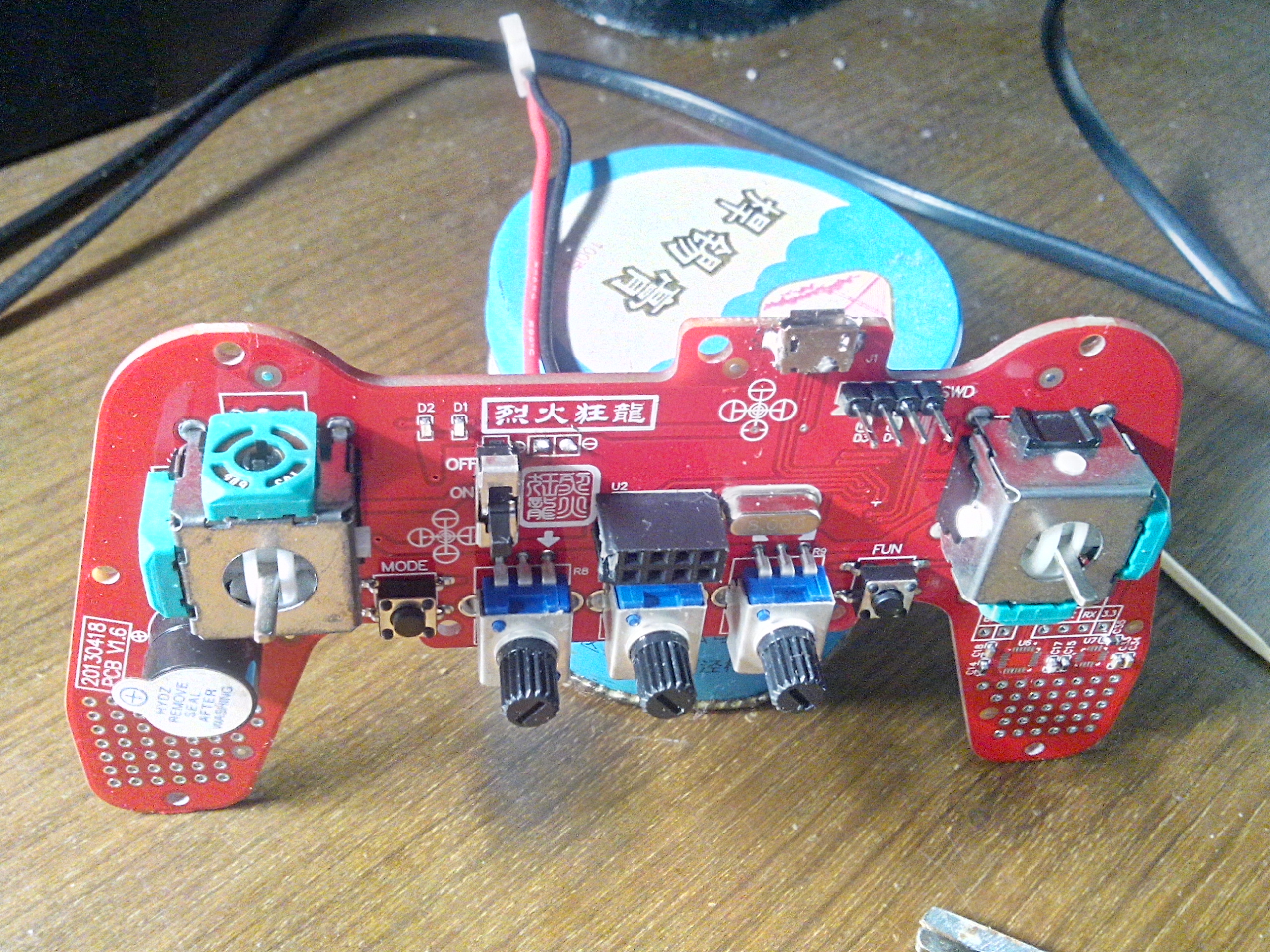
到这里遥控器部分就完整完成了。对了,还要把黑色的手柄装上去,最后连上电池试试,在用橡皮圈把电池固定到遥控器上,就全部完成了。

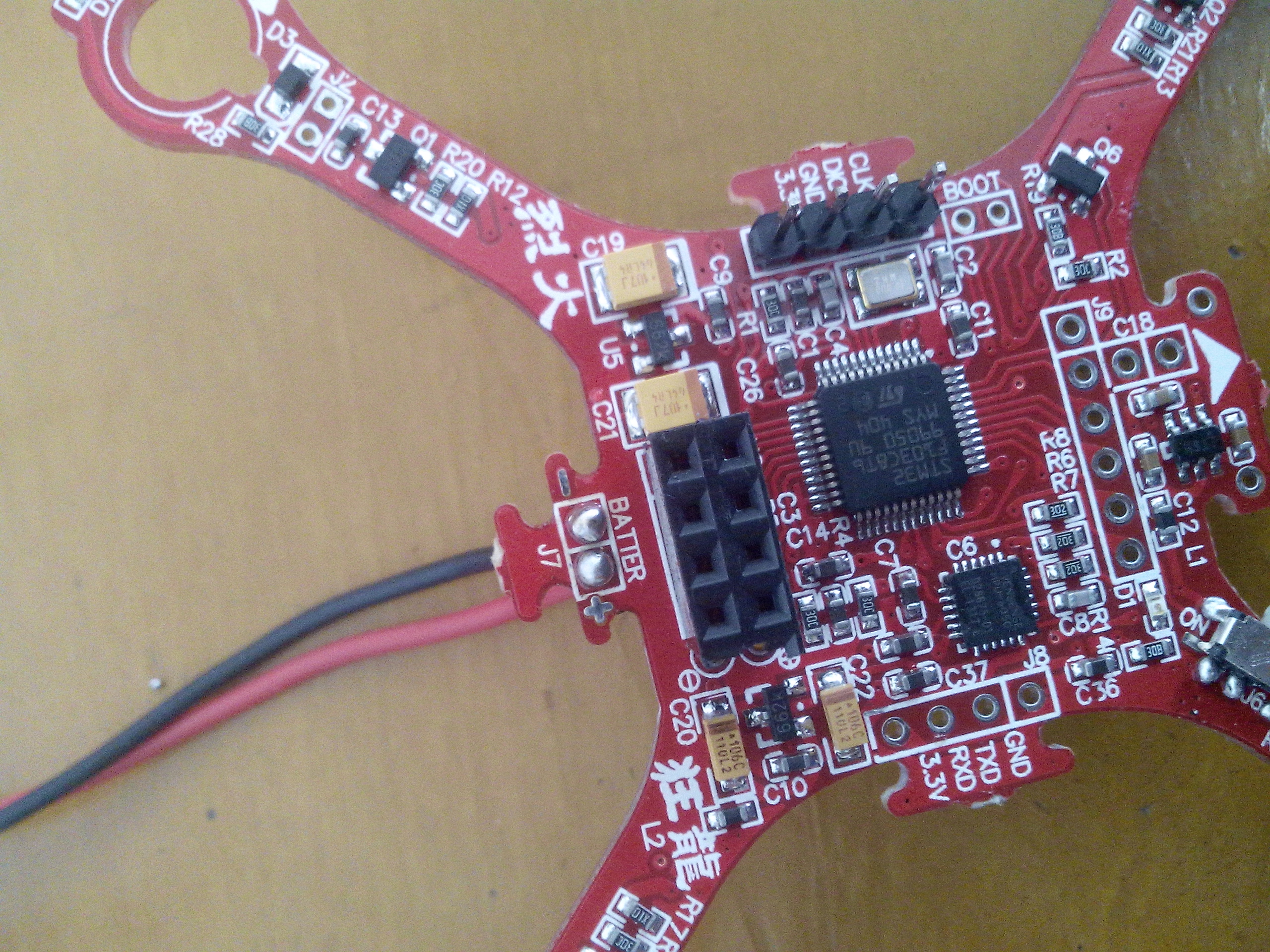
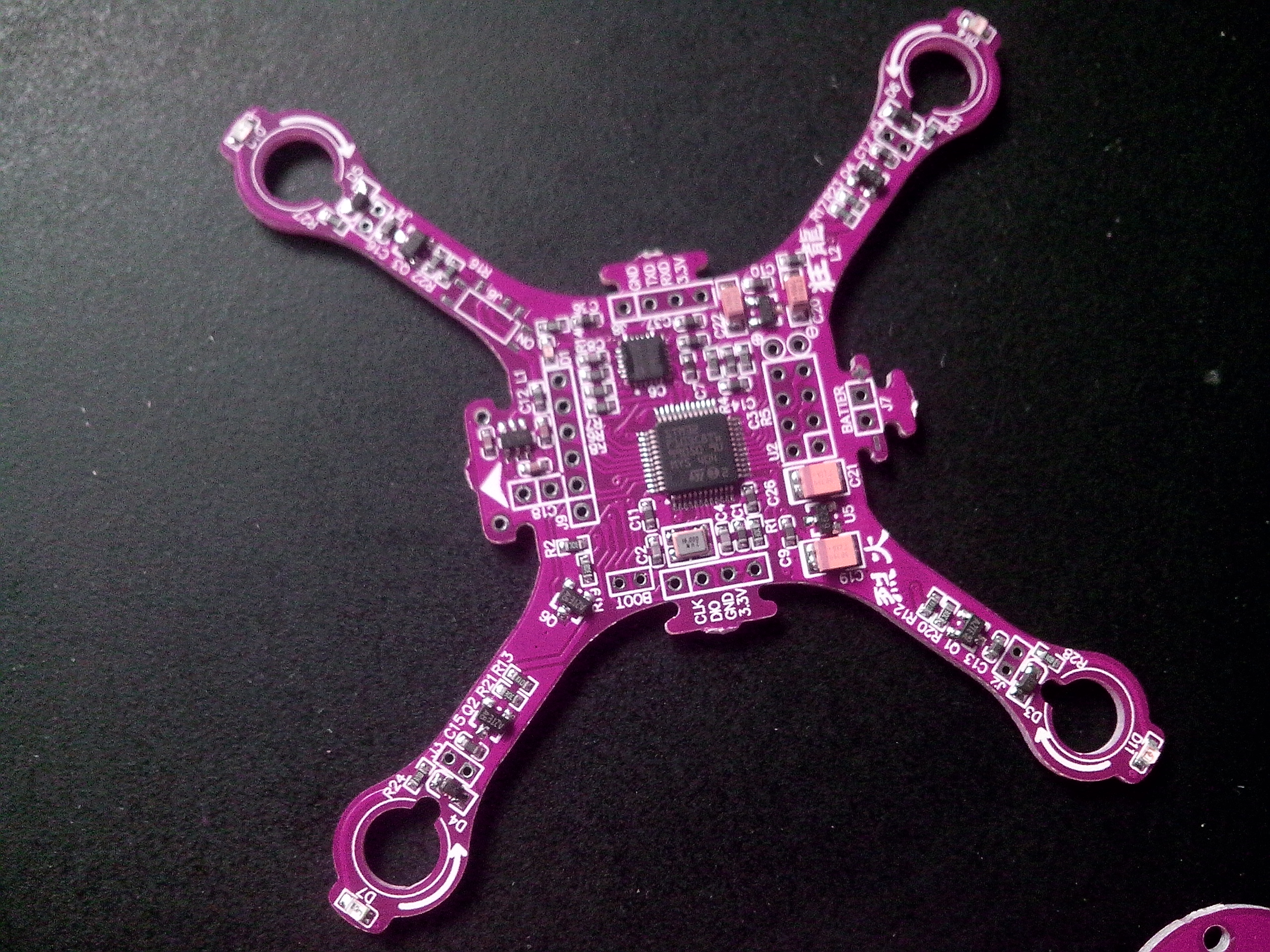
飞控板部分
楼主起先以为飞控板上会很难,元件比较多而且又细。后来发现到手的飞控板大部分元件都已经贴上去了,要自己动手焊接的部分很少。但即使是这样依旧得小心焊接,小心一不六神整个板子就都废了。
飞控板上要焊接的内容是这些
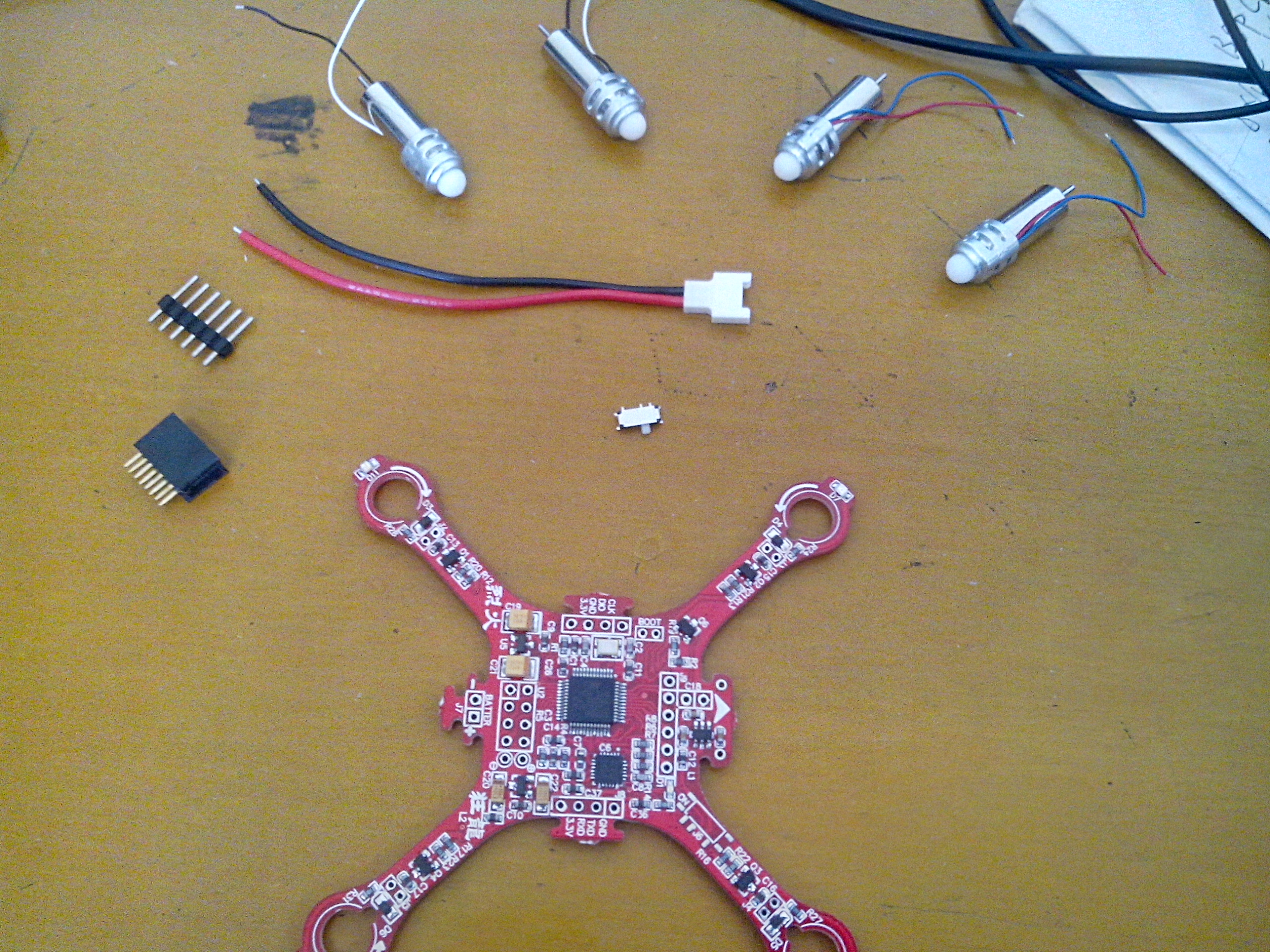
楼主推荐的焊接顺序是
开关 --- 排针 --- 排座 --- 电池连接线 --- 4个空心杯电机
1.开关
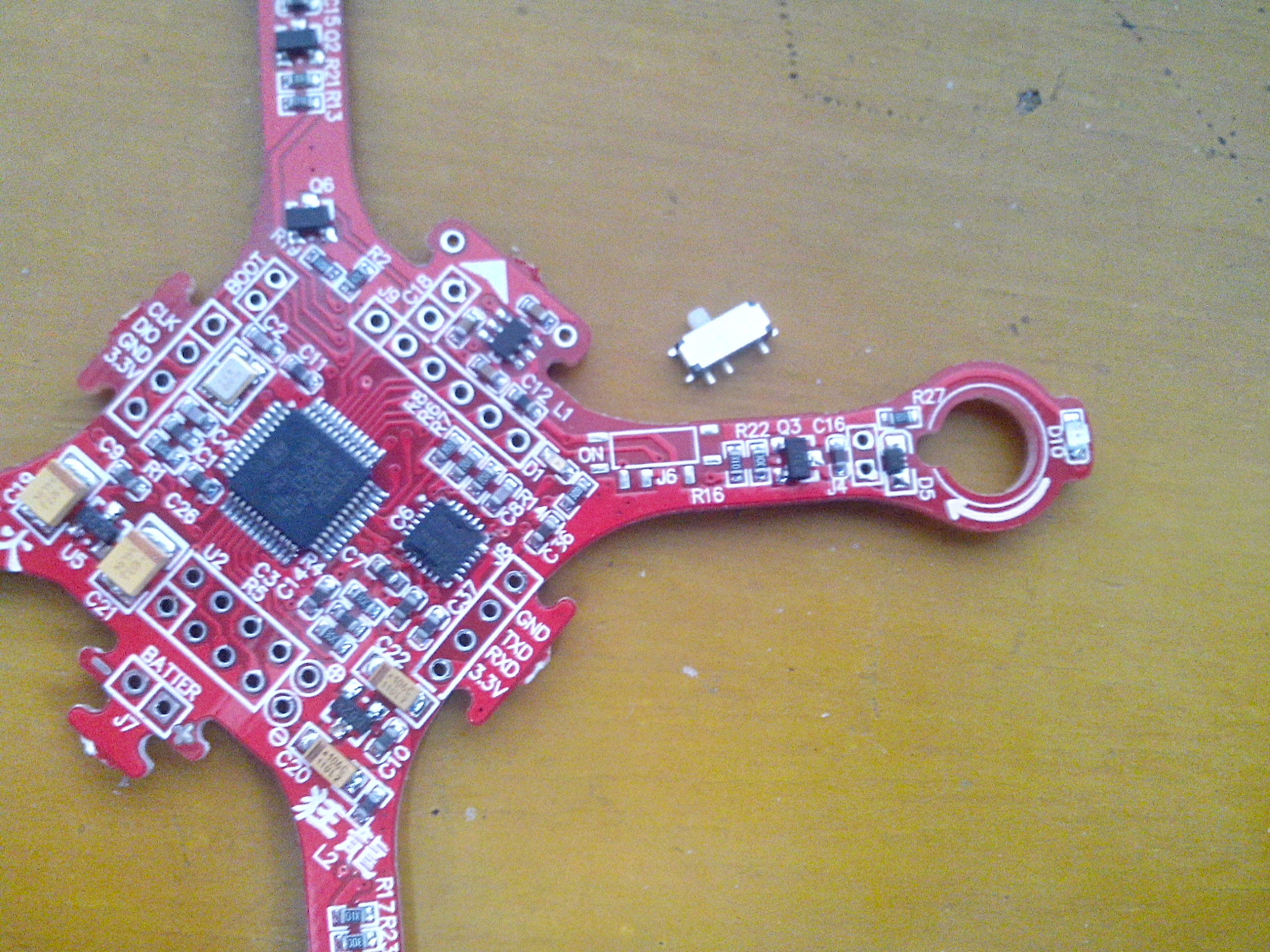
最不好焊接的部分了,一定要小心,板子上元件多,焊接开关容易弄到其他元件,一旦焊锡给多,连到其他元件,在要修复就不容易了。
跟microUSB一样,开关上也有两个小脚,最好能够去掉在焊接。这两个小脚太粗了,楼主试了半天没能把它弄掉,就放弃直接焊接了,不过,最好还是能去掉在焊接,不然在飞控板上放不平
也是折磨了很久,总算给弄上去了。关于这个开关的话,保证中间三个脚焊接好就可以了,侧边的4个脚与外壳相连,只是用来固定开关的,侧边靠下的两个脚焊接的话容易跟开关脚连到一起,为了避免这种情况,推荐不焊接侧边靠下的两个脚。或者侧边脚都不焊接,也是可以的,只要注意在动开关的时候动作轻点,不要弄断,一般都没有问题。
2.排针

跟遥控器上的一样,排针焊接到你用来调试的口。如果喜欢串口调试就焊接到串口,如果自己手上有jlink就焊接到swd口来调试,楼主选择焊接到swd

大家想调试方便的话,最好还是将swd,串口都焊接上排针。楼主的排针不多了,串口就用公头杜邦线凑合用着。
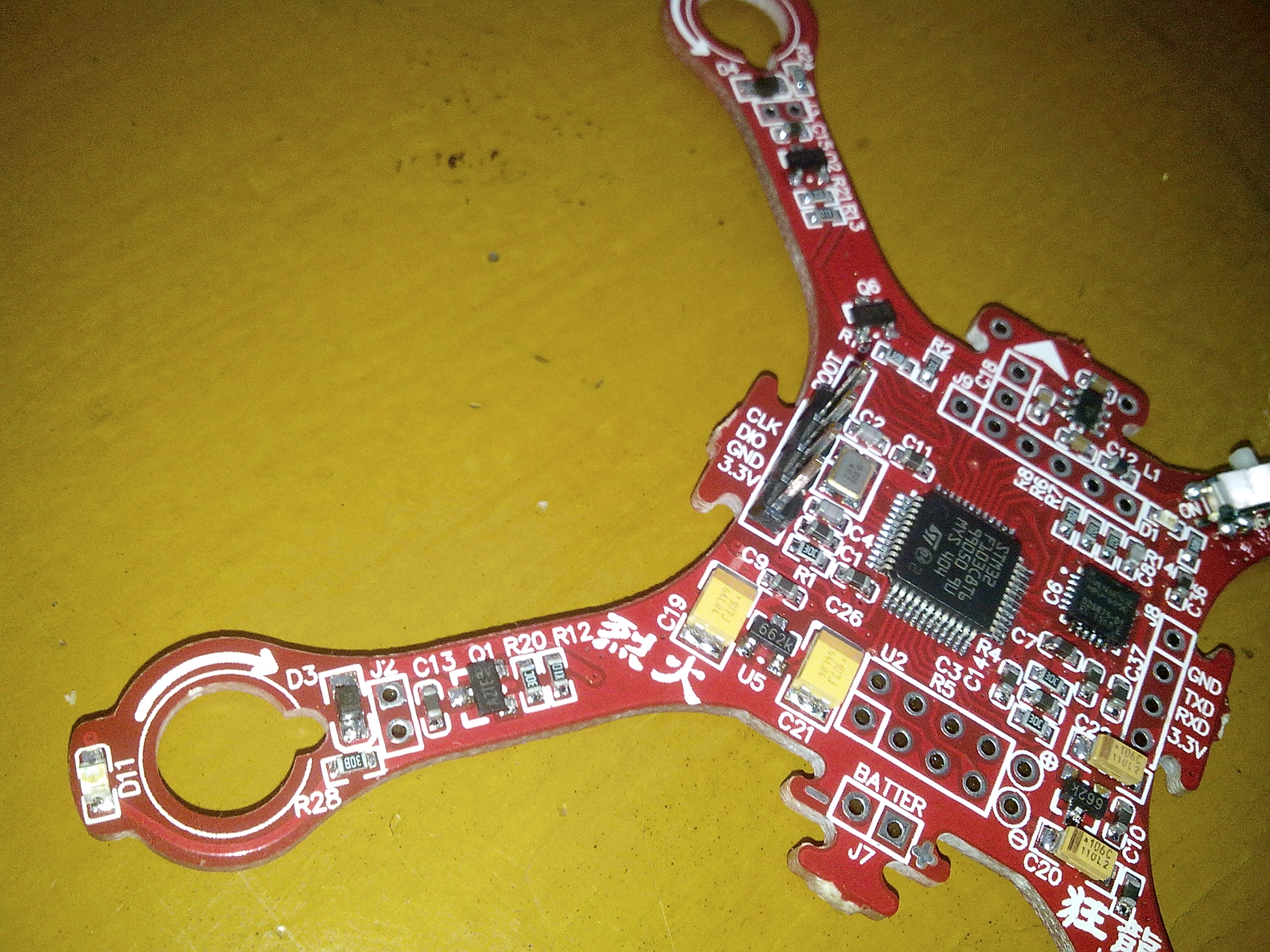
3.排座
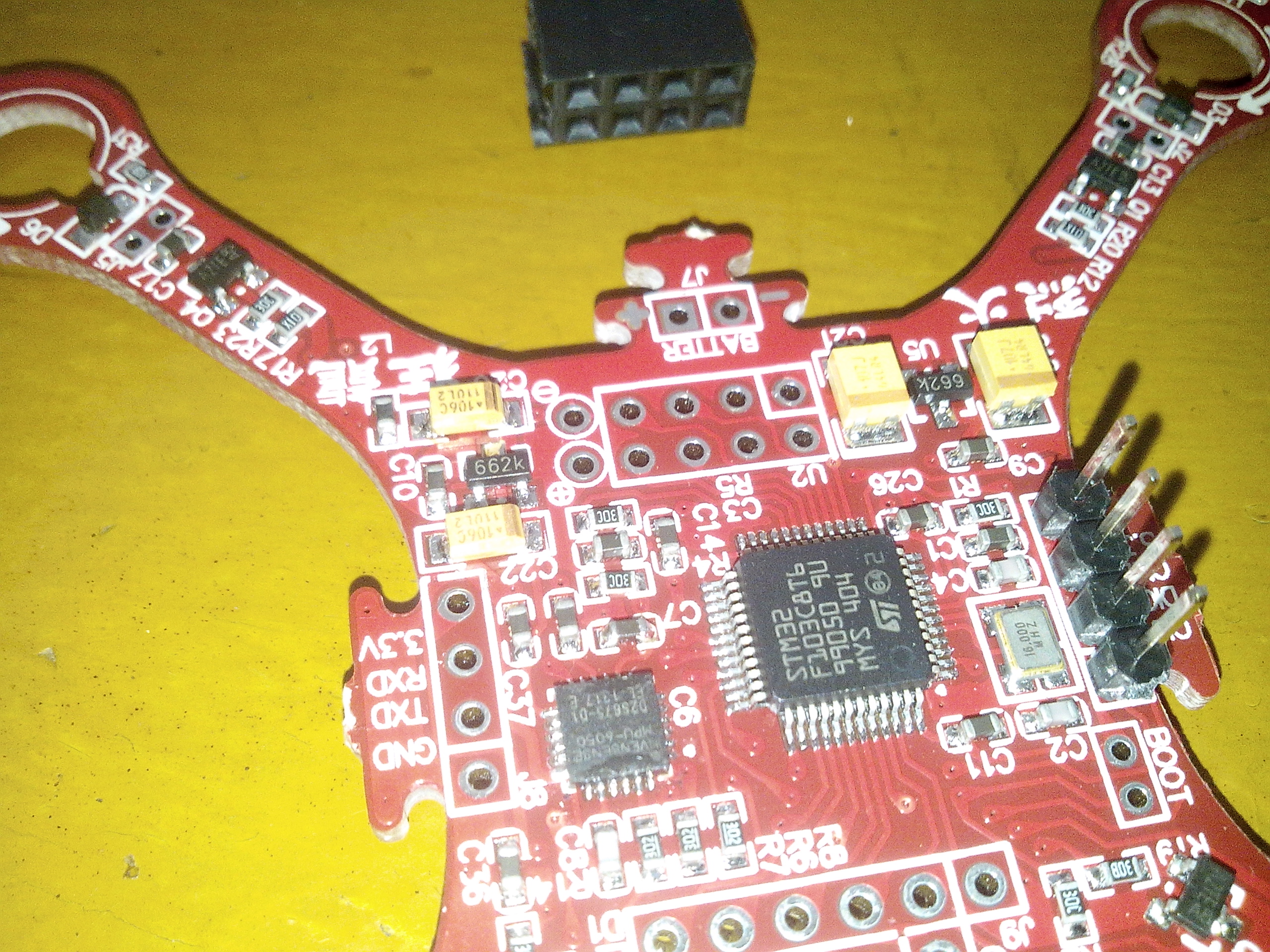
焊接到图中U2的位置,排座用来连接nfr24l01

4.电源连接线
电源连接线焊接到battery,可以焊接到正面或者反面,红色是正极,黑色是负极。
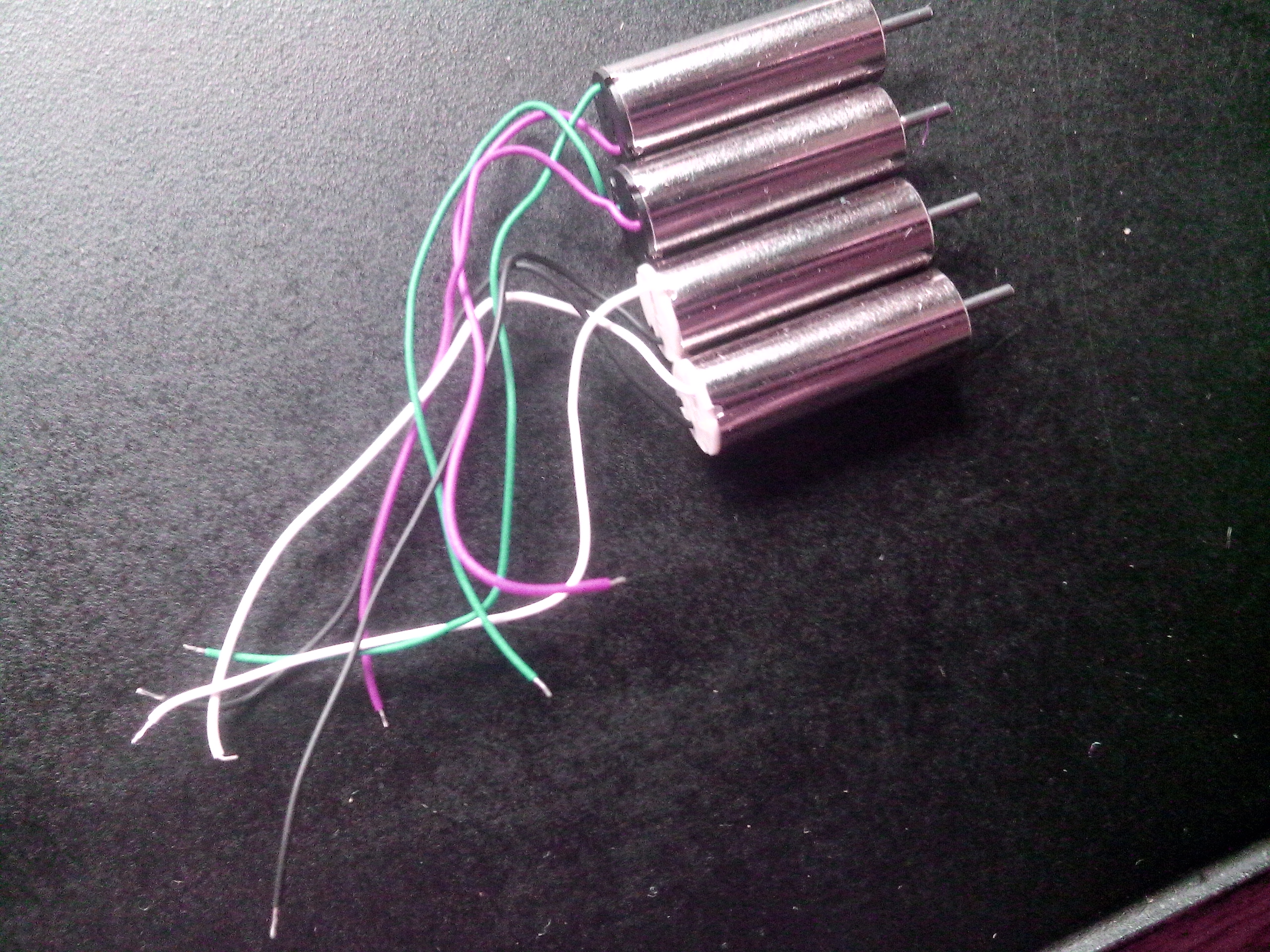
5.电机
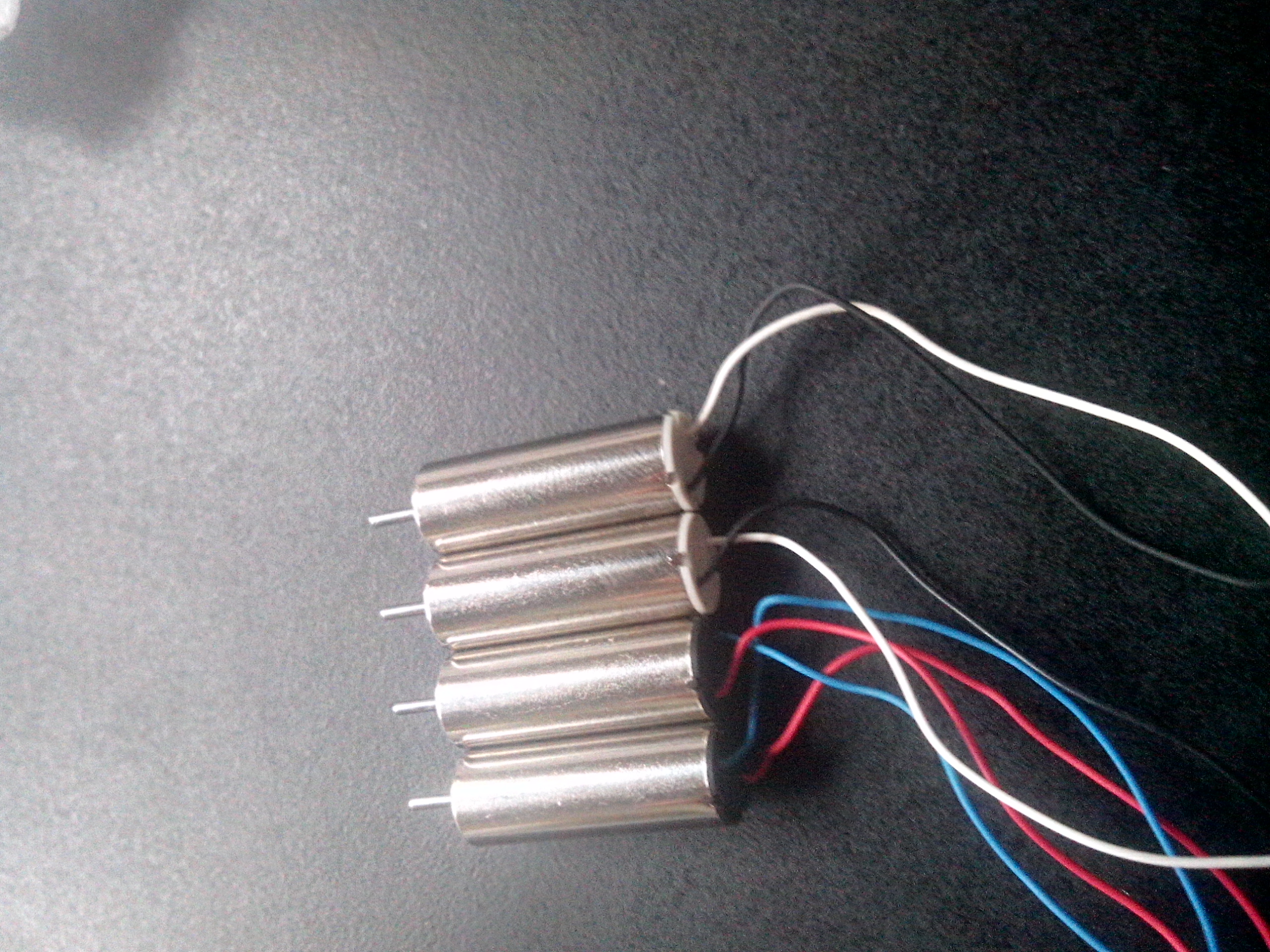
关于到手后的4个空心杯电机,首先我们要组装一下,安装下面的固定座

电机一套,这3个先组装到一起

先将这两个,装配好,可以从上面按下去,或者从地下塞进来。没有工具的话,塞进来要容易点
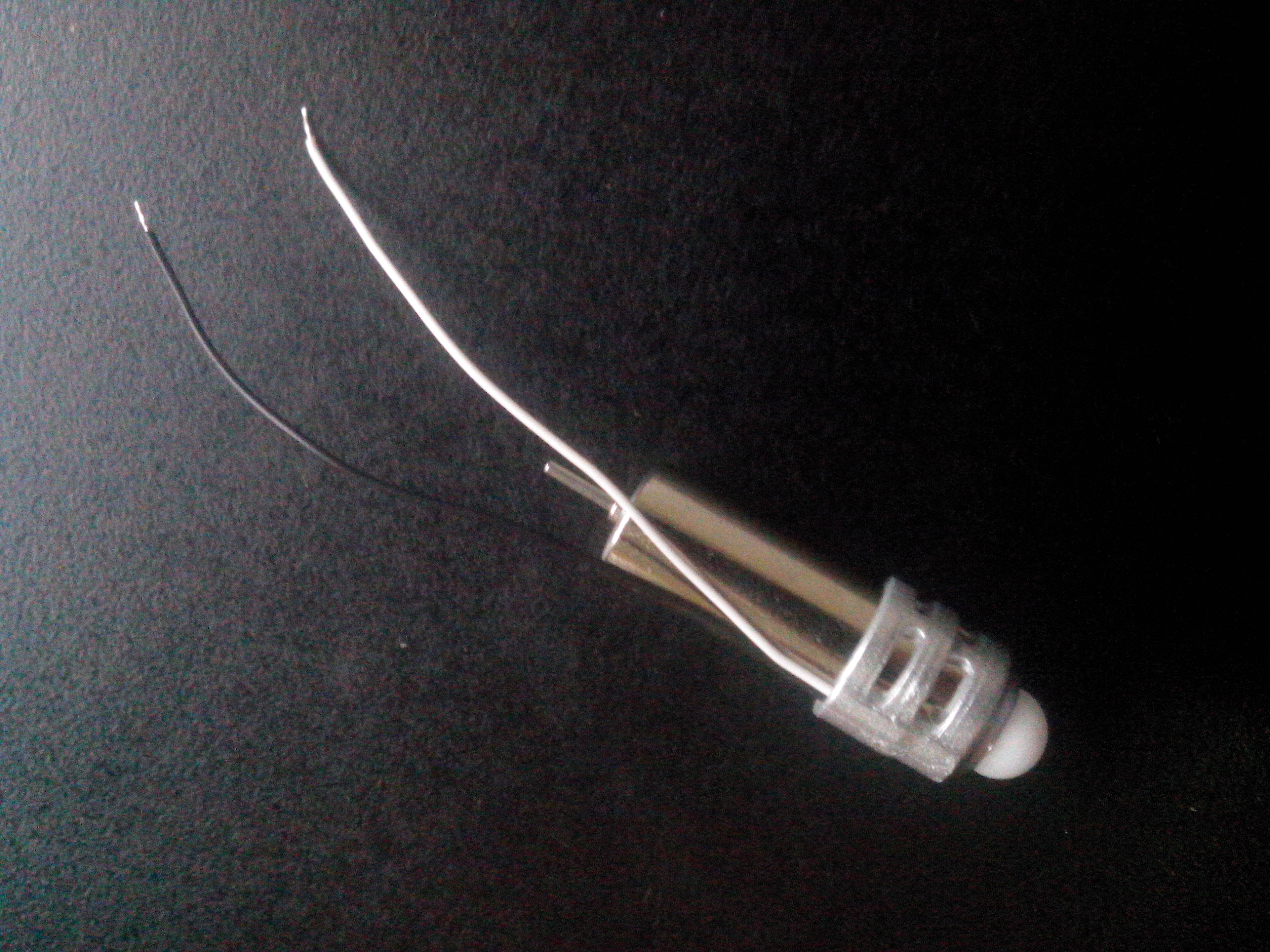
在把电机按下去,注意不要伤到导线,导线顺着缝隙牵上来即可,这样,一套电机组装了。
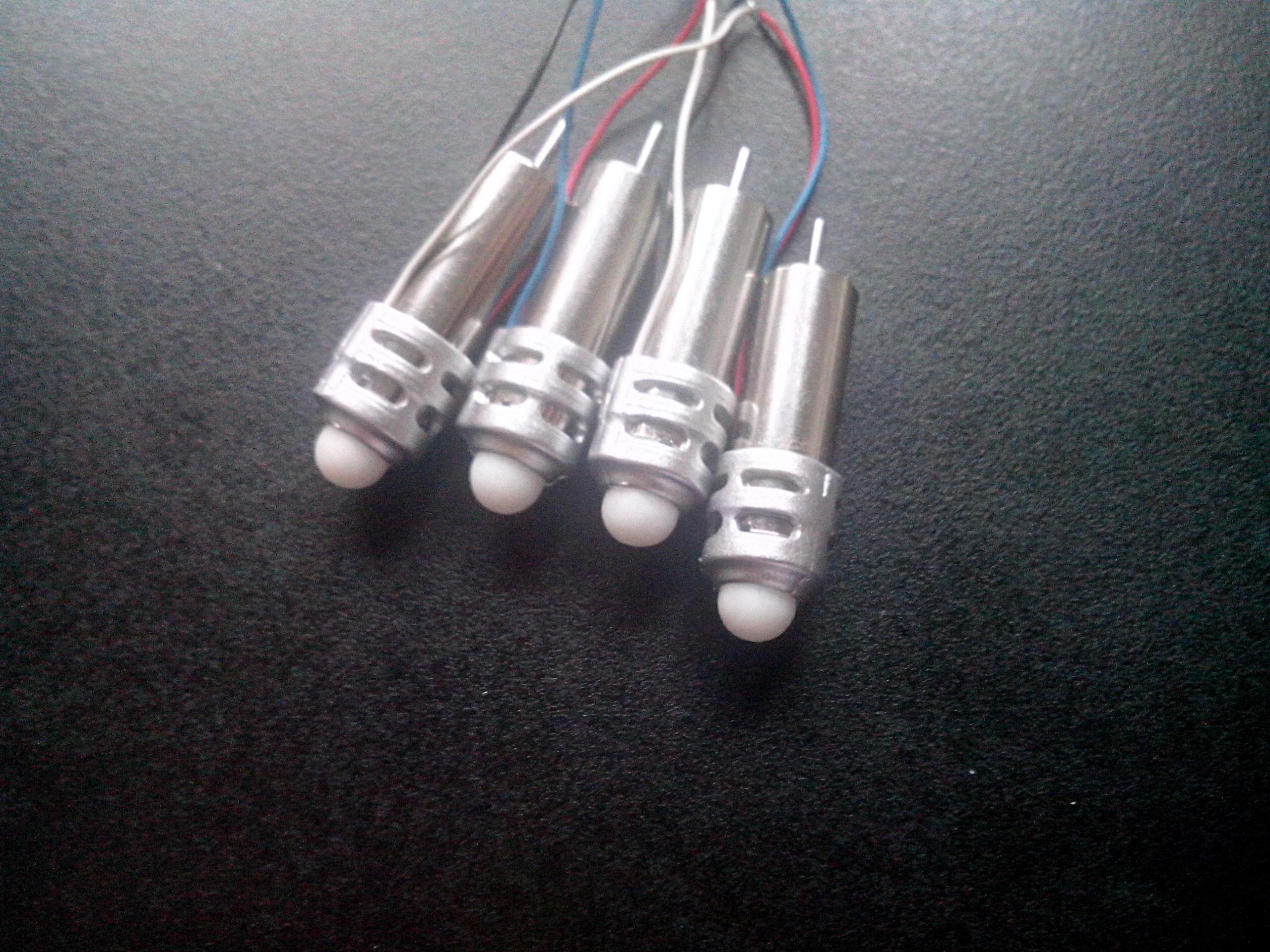
将4套电机都按照这个方法组装好,导线比较细,容易断,装配的时候要格外小心。

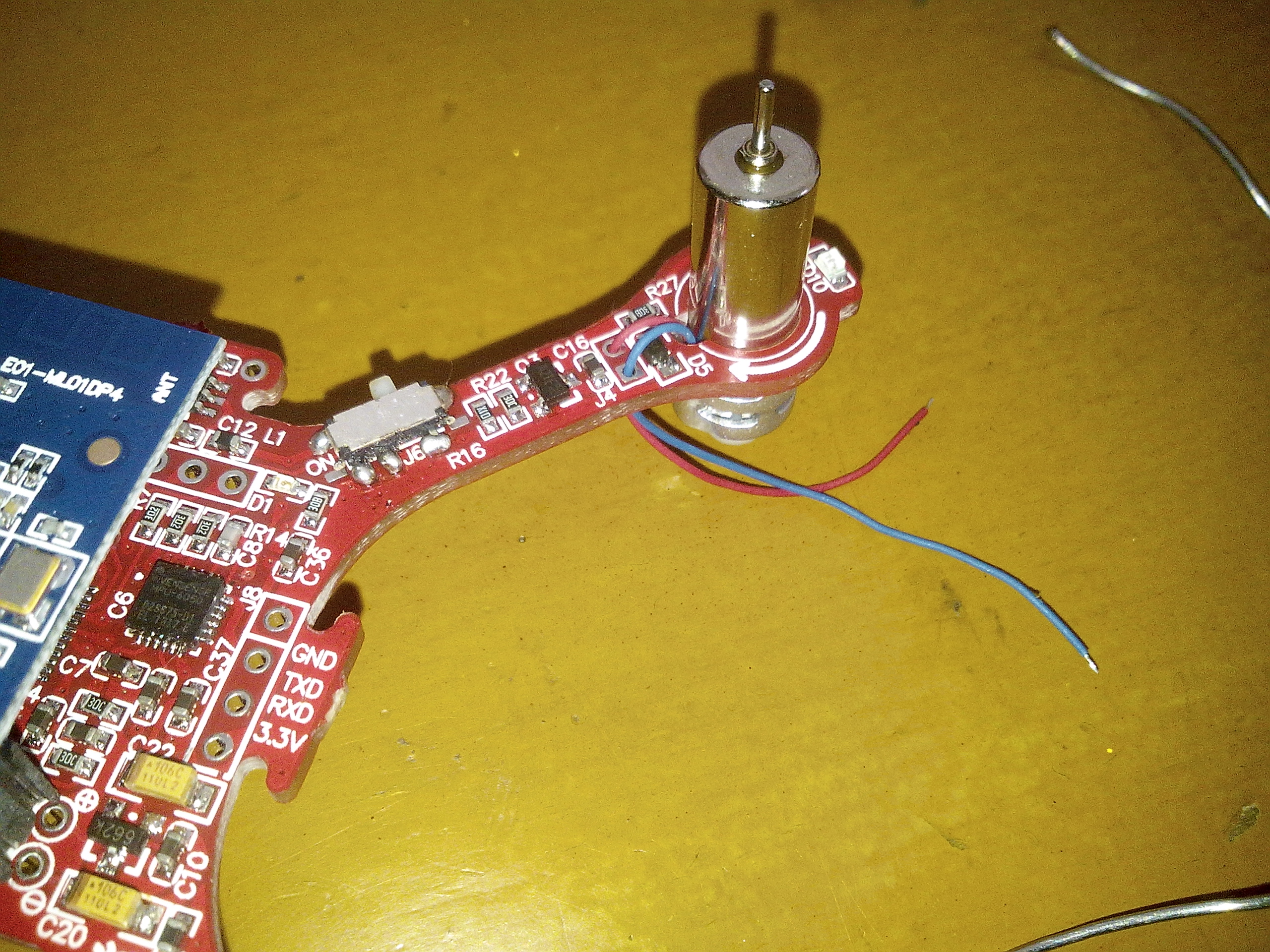
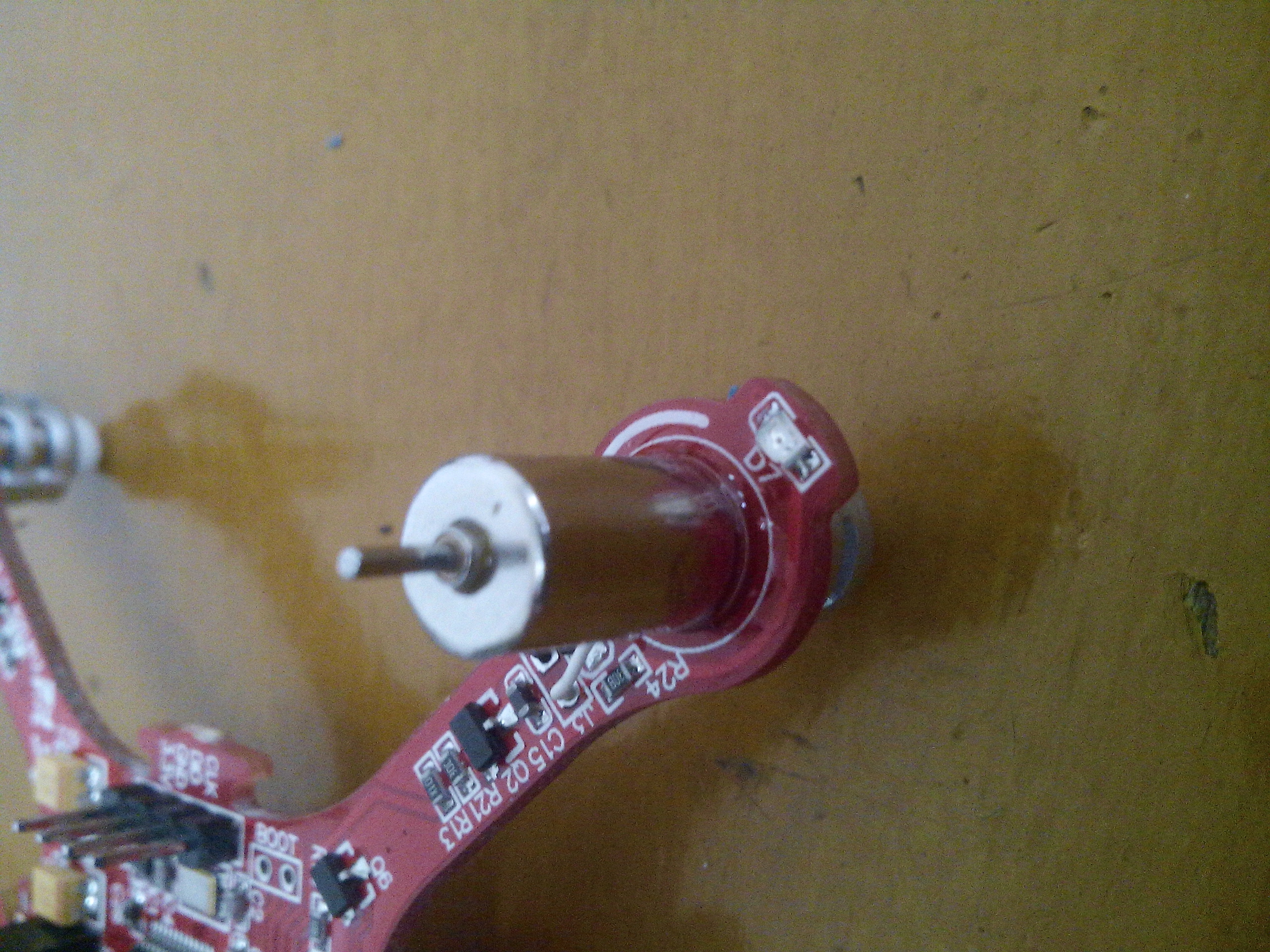
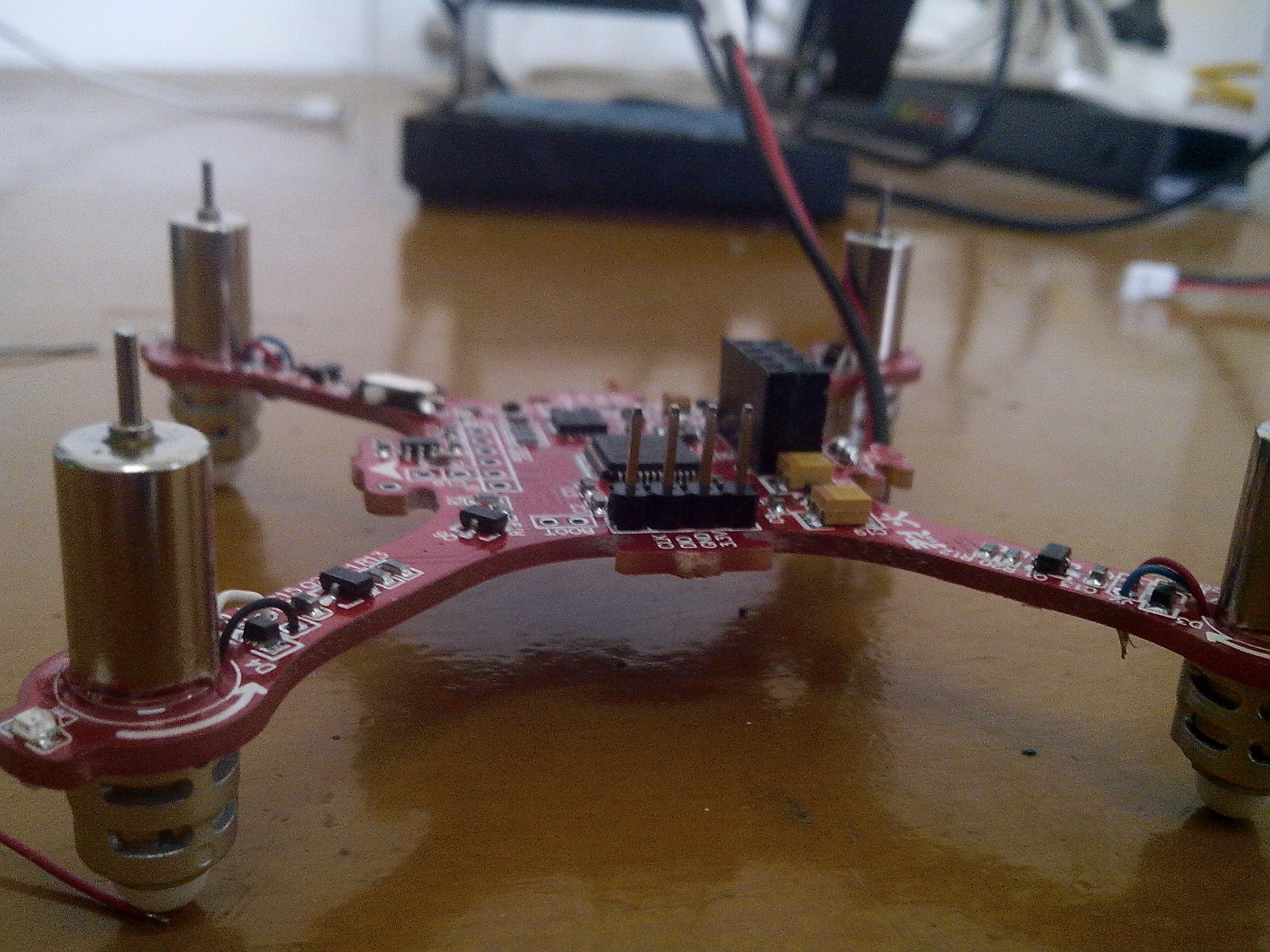
然后就是把电机放到飞控板上去。

关于4个电机的顺序问题,红蓝线电机是顺时针旋转的,看飞控板上的箭头指示,红蓝线电机放在这个位置。
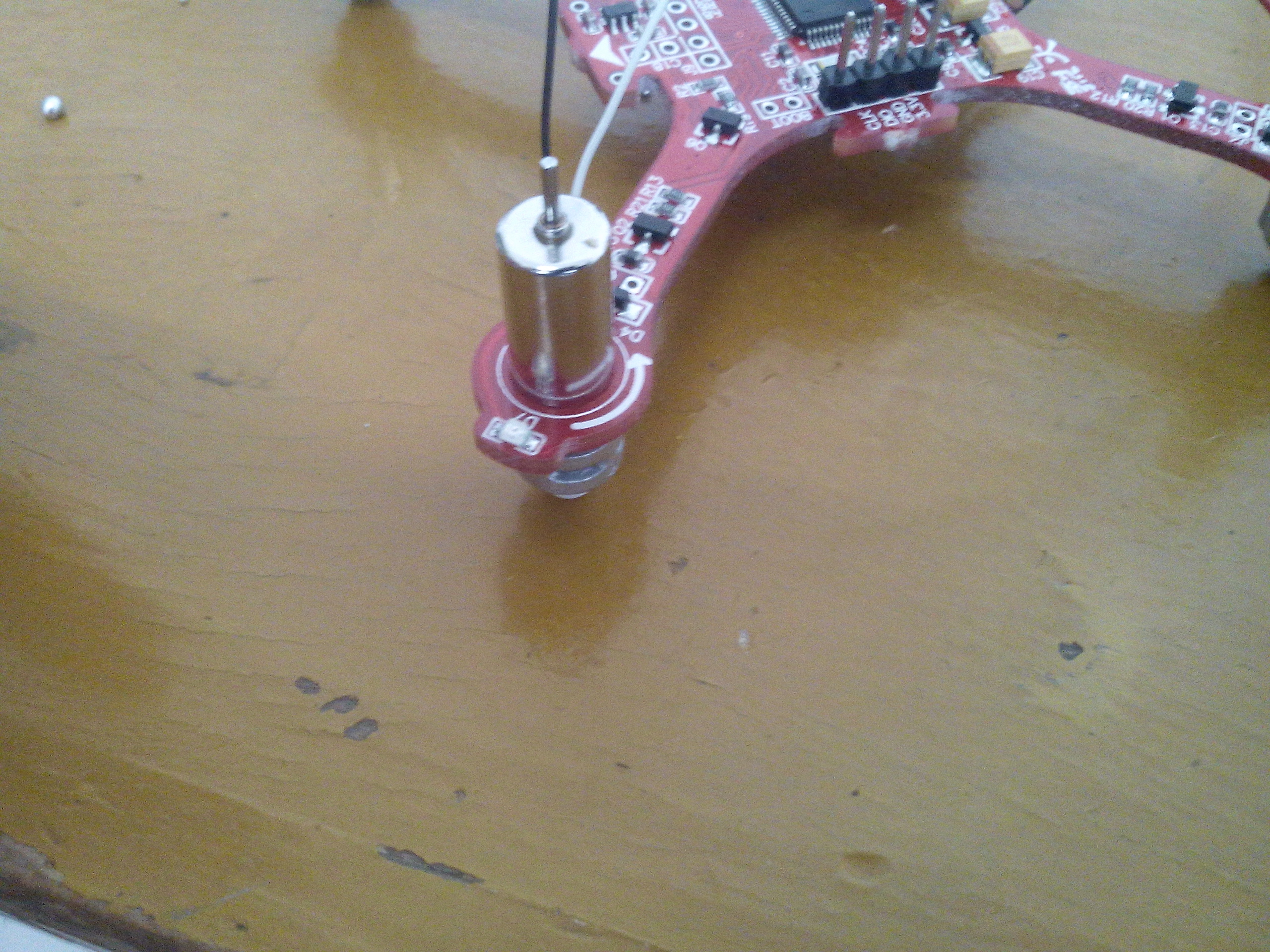
黑白线电机,逆时针旋转,放到这个位置

4个电机分别在飞控板上放置的位置像这个样子
然后开始焊接电机的引线
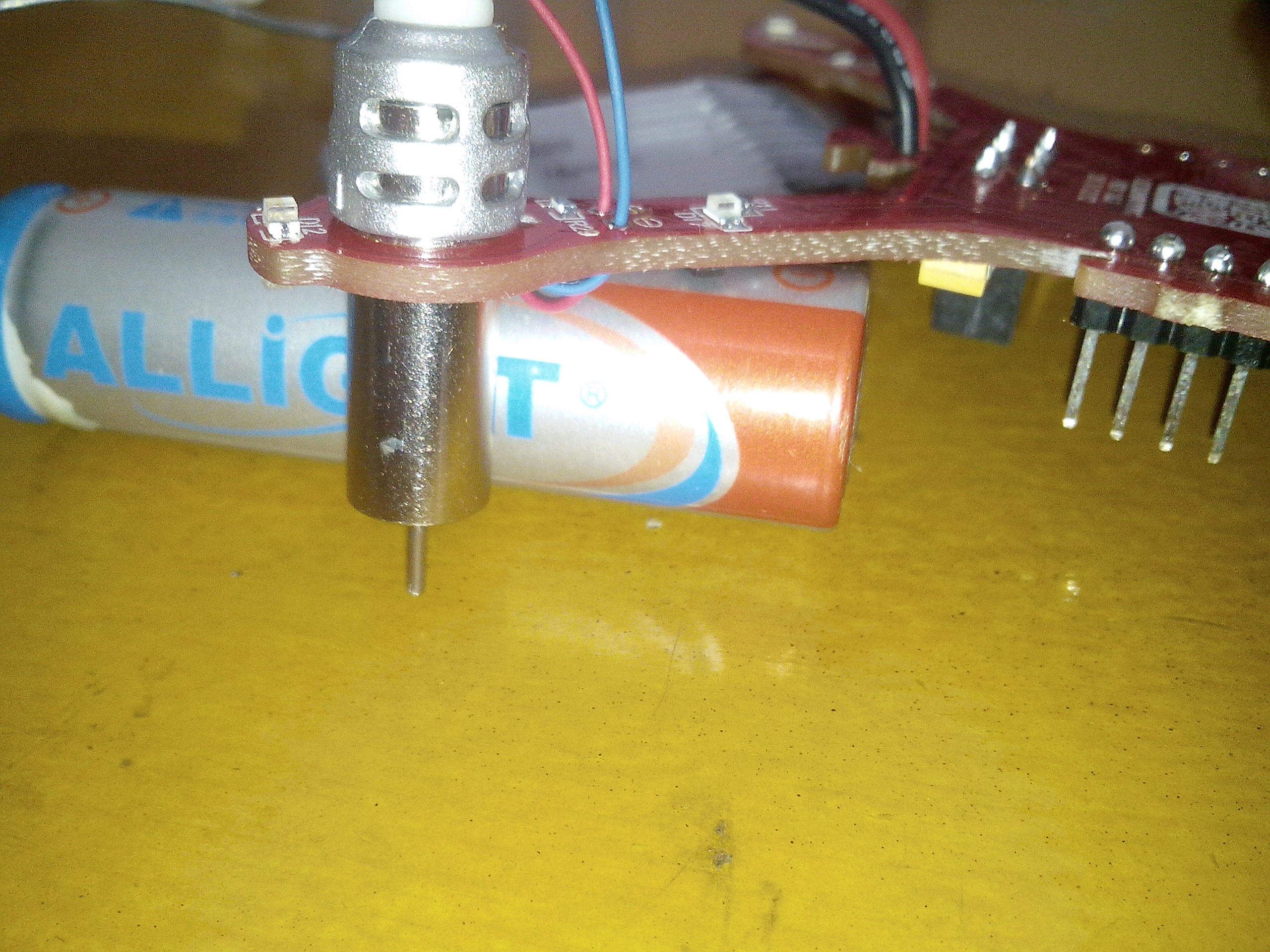
首先,把引线穿过去。

剪断太长的引线部分
去皮,用烙铁稍微一烫,轻轻一拨就可以去。

在加锡焊接。
第一个电机就这样焊接上去了,其余几个也是一样的操作方法。



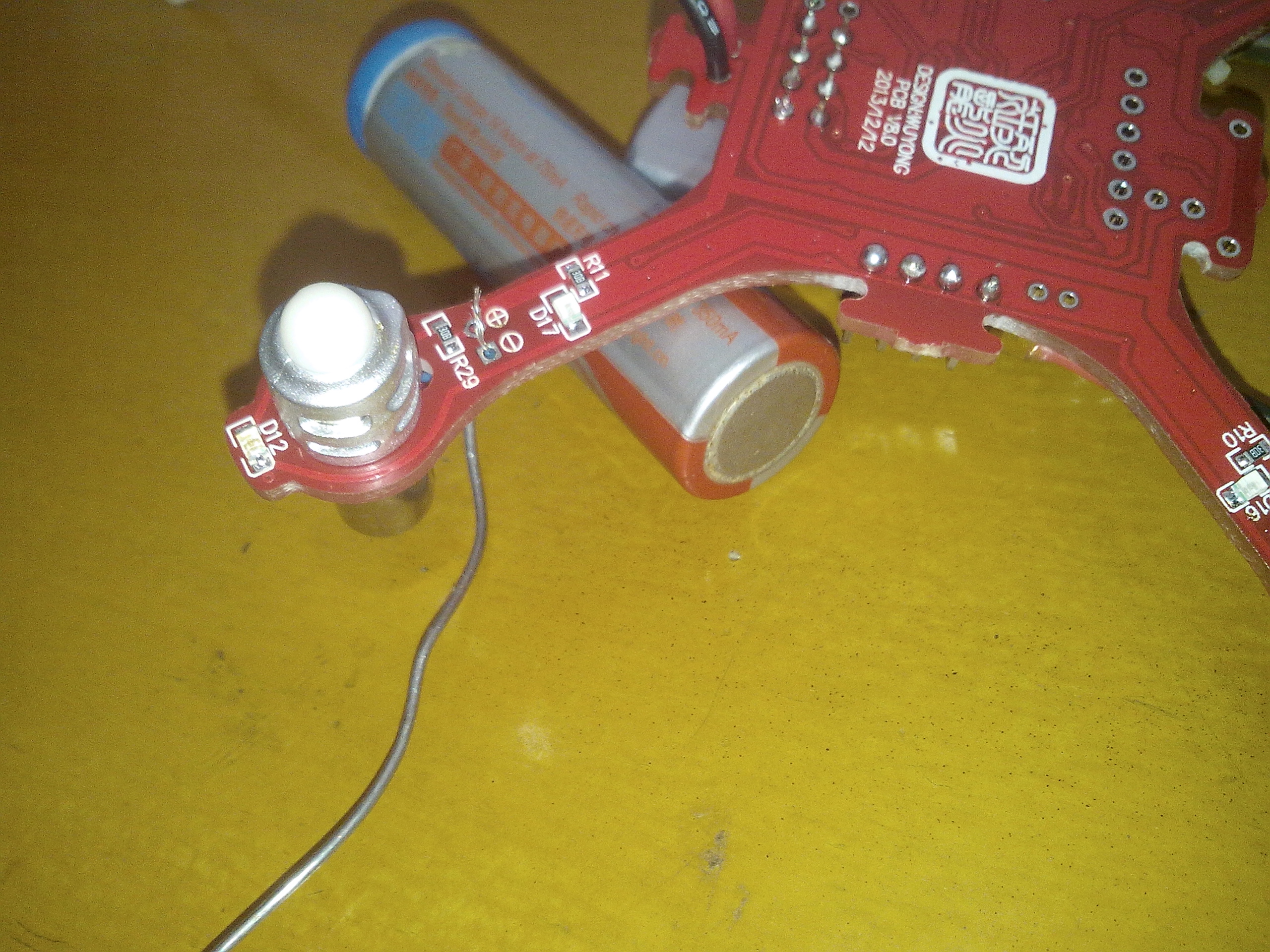
4个电机的引线全部都焊接好之后,下一步的任务就是固定了,拿出502
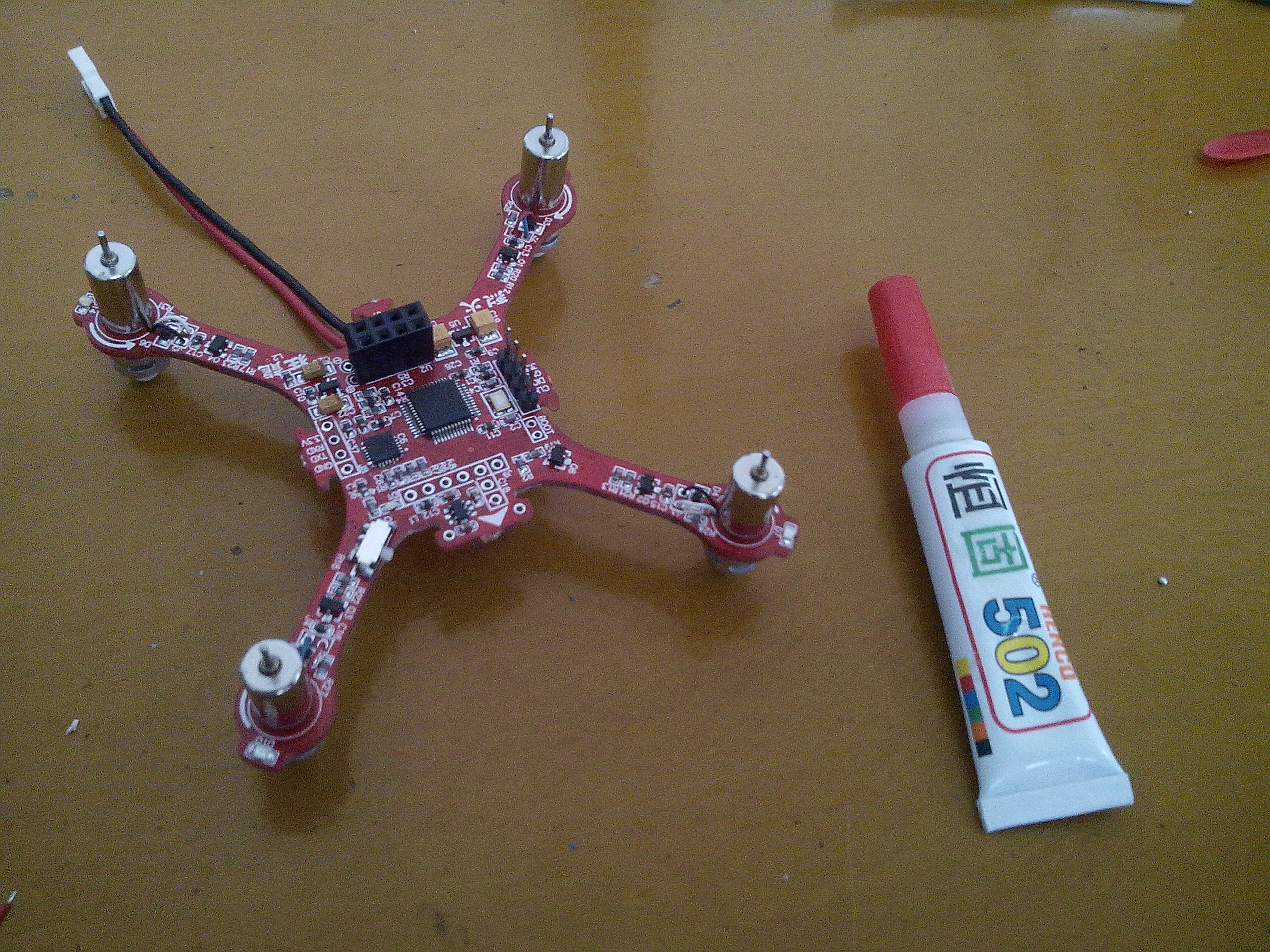

在每个电机周围,都点上3滴,然后等待5分钟,电机就全部固定好了。记得要先将电机放平整在进行固定。
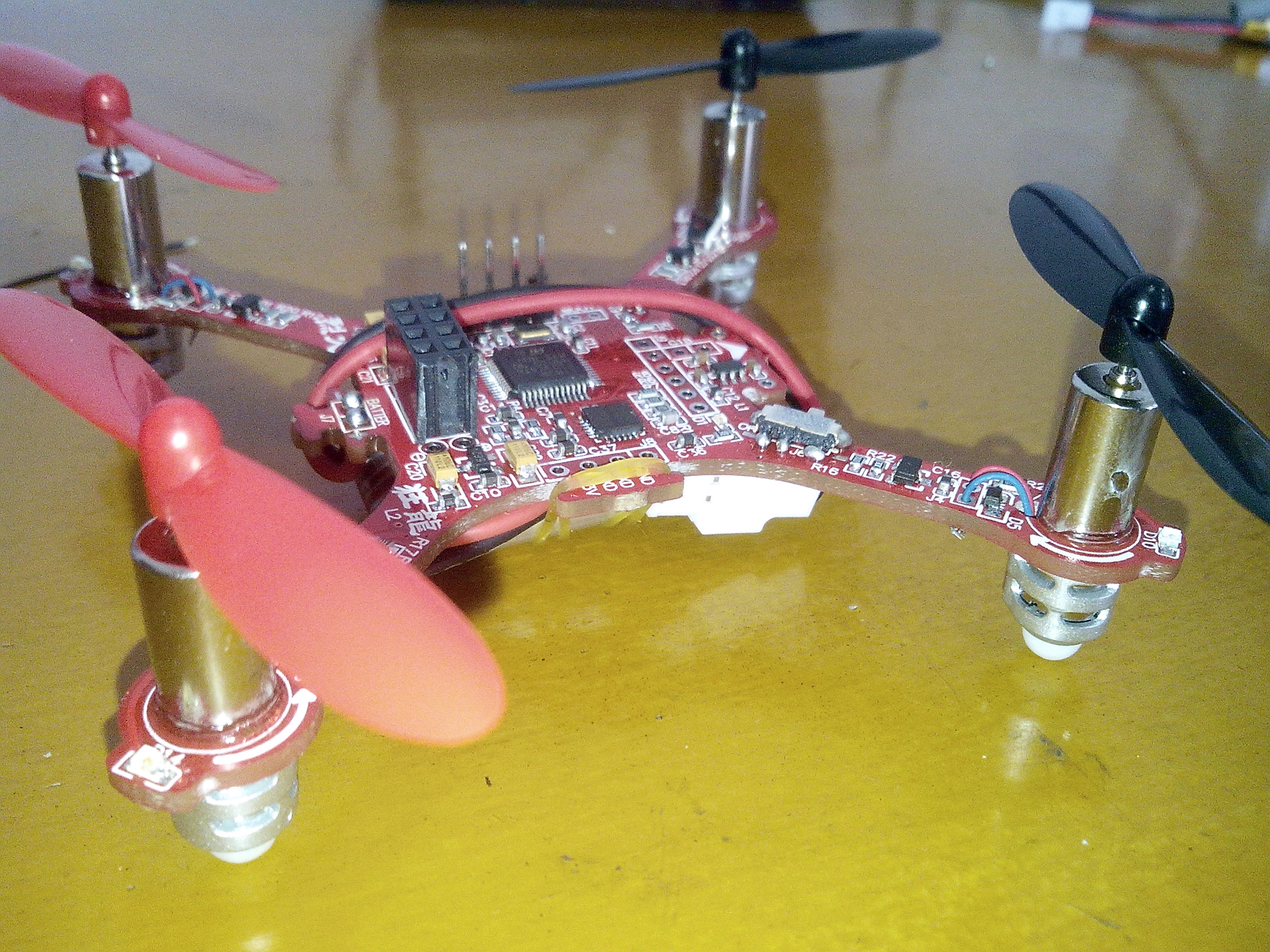
电机全部固定好,这张拍得还不错。
然后是安装叶片,安装叶片的时候,注意A叶,B叶,具体哪个叶片接到哪里,看图

看叶片形状也是可以的,基本思路是,保证电机旋转的时候,每个叶片都向下吹风就可以了。
用4张图片描述下叶片的安装:




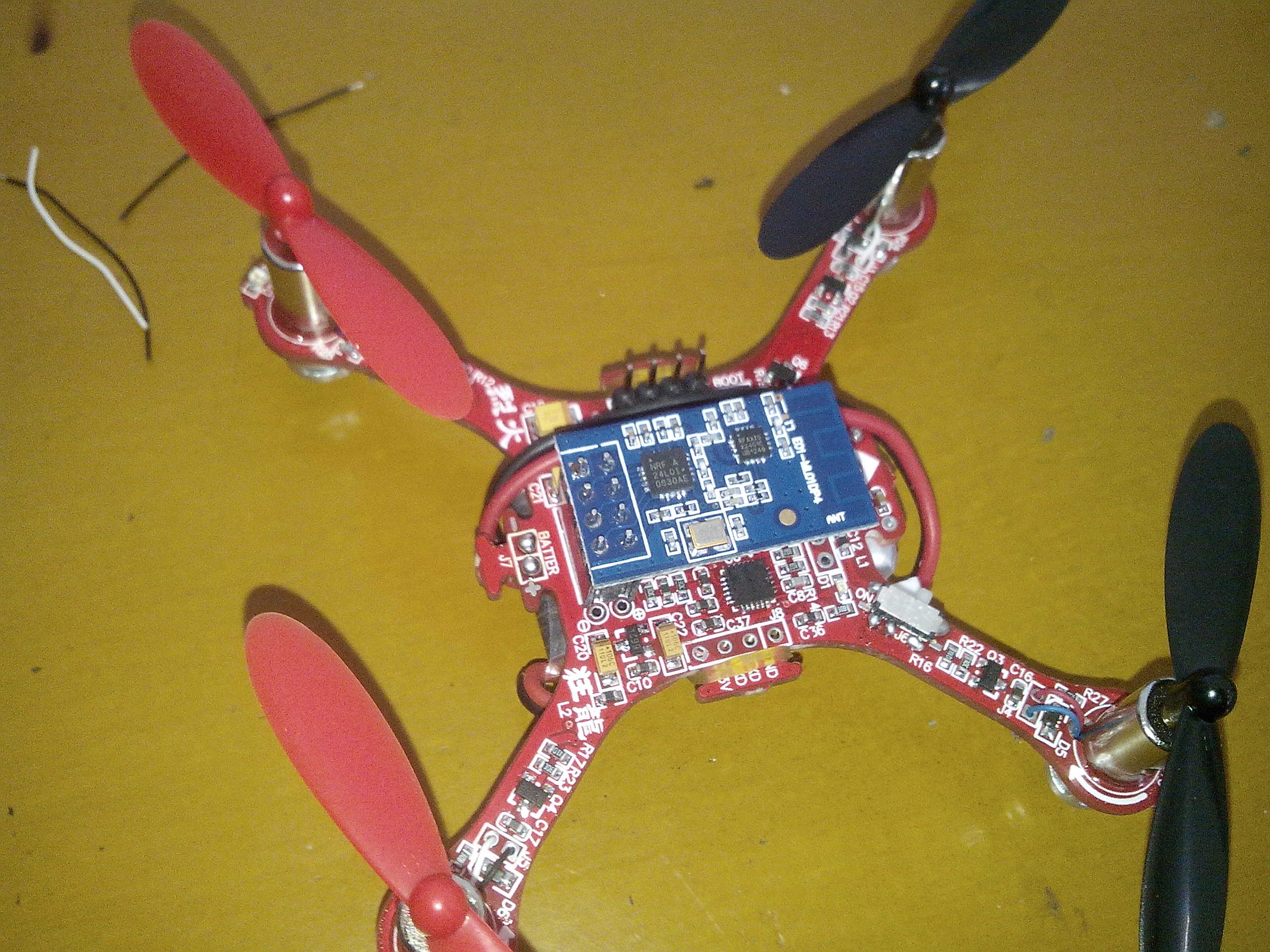
将电池按照这个方式绑到飞行器上

最后在把nfr24l01放上去,到此,全部焊接、组装完成!









 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

