
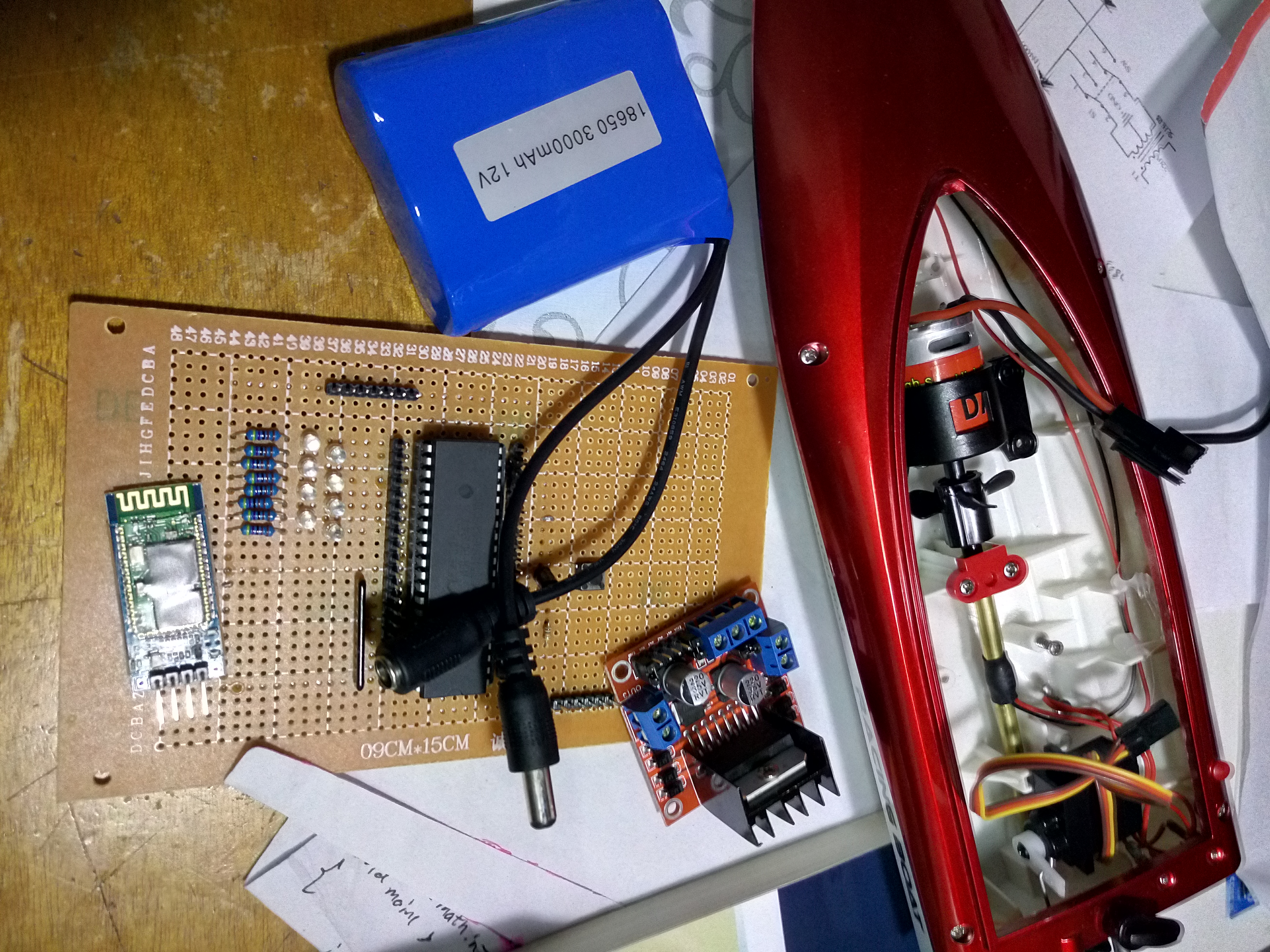
在对51定时器的进阶性学习中,本组对设计的智能游艇有了更深入认识,
电源采用12v锂电池组。
在转向摆采用9g舵机通过转7805三极管输出5v供电,
螺旋桨采用370系列高速直流电机,在吸取用自己在网上买的5v输出变压器击穿的经验后,为避免电流过大损坏7805三极管,改用直流驱动控模,块制占空比来控制对直流电机的电压输出要求,解决电流过大问题。
潜艇模型买回后,对排水量进行了测试后,为了避免水位达船体过高,考虑在潜艇的两边用热熔胶衔接两个气囊增加排水量。
在紧接着的一周将舵机,直流电机调试完成后将带线试水。
本阶段暂时通过独立按键控制转速,以及舵机配备螺旋桨的转幅,后期将通过调试,在51系统板上加上蓝牙模块,通过手机终端控制。


 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

