
前面2节讲述了dsPIC33E的Flash存储结构以及Hex格式,接下来开始讲述如何编写Bootloader下位机和上位机。
本节讲述下位机的设计,考虑到执行效率和烧录时间,我们将主要解析工作放到上位机中,因为PC的执行速度远高于MCU。在上位机中,我们将Hex文件解析成一组一组的地址和数据组合,然后将一个地址和数据打包发送到Bootloader,Bootloader将其写入对应地址内。
我们先将地址空间分割成三段区域:
0x000000-0x0007FF: 第一段为起始跳转、复位和中断向量表
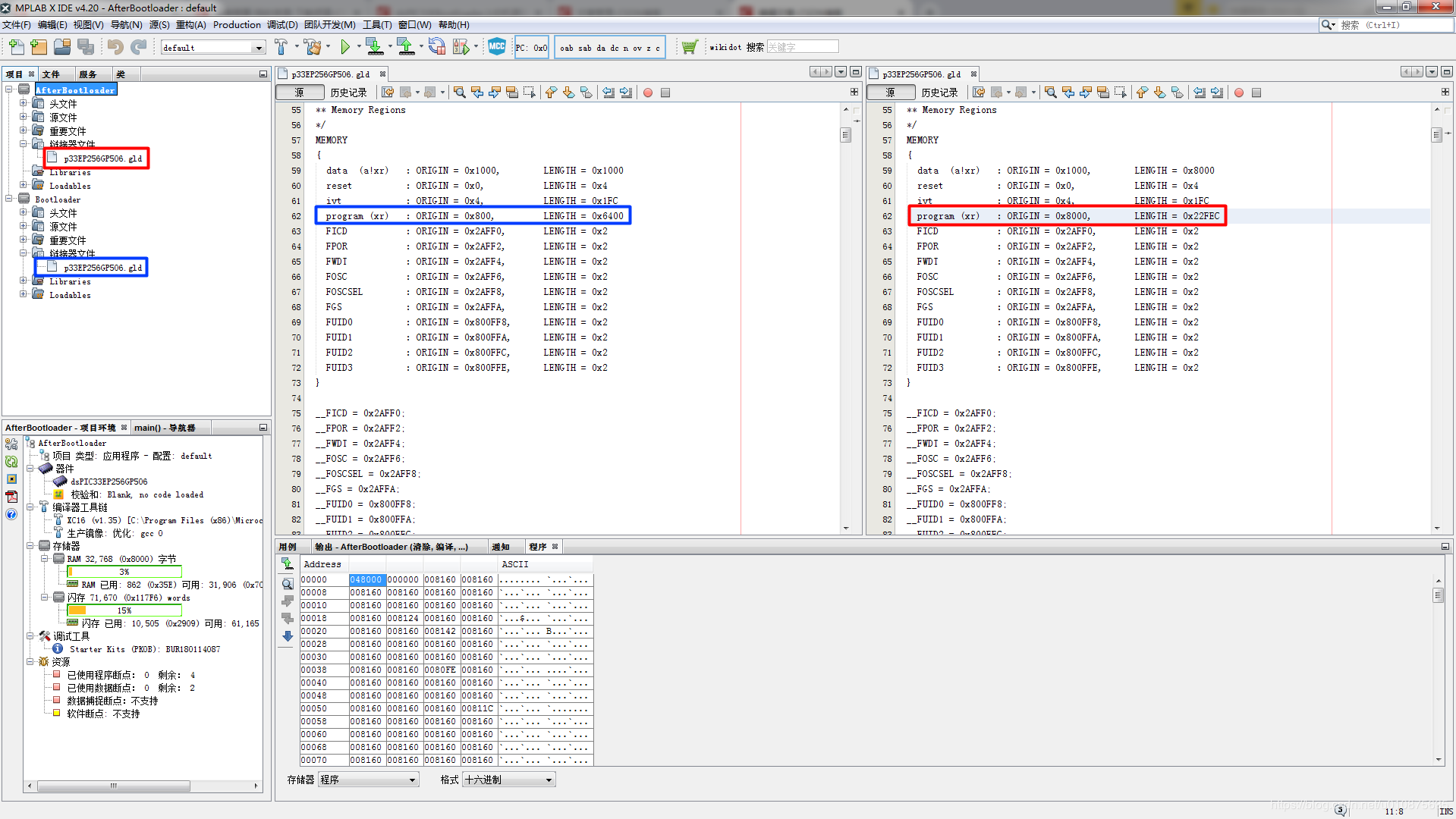
0x000800-0x0071FF: 第二段为Bootloader,此处预留0x6400长度,为了以后扩充,多预留了一点,后面再空一点点。
0x008000-0x02A800: 第三段为User App,注意最后一页(包含配置字)不要使用,擦除时会导致代码保护清零。
分别在Bootloader和AfterBootloader(即User App)项目中添加gld文件(从xc16安装文件夹下复制到项目目录下),修改对应的程序地址(修改program (xr)的起始地址和长度),这样编译时,会限制程序起始和结束地址。
以下我们将使用具体项目来说明,使用的芯片为dsPIC33EP256GP506
示例项目下载:https://download.csdn.net/download/u010875635/10819819
Bootloader中,最重要的就是2个功能,一是通信,二是Flash读写。由于不能使用中断,防止中断向量表与User App的冲突,通信都采用查询模式。开发板正好有现成的串口,本例采用串口通信,考虑到后面可能会使用CAN,因此核心数据长度为8bytes,串口本身校验功能差,我们再在前后分别增加2个字节,总计12个字节。
此例总共设有5中命令,兼容Bootloader和User App,分别为:EntryBootloader(User App中可用)、Reset、Data、DataEnd、CheckBootloader、Erase。
EntryBootloader,Bootloader不适用,User App中可用,由上过机发送过来的命令,用于在User App中复位到Bootloader,以便于进行代码烧写工作;Bootloader启动时会向上位机发送EntryBootloader回馈,表示进入Bootloader。
Reset,Bootloader中可用,上位机发送过来的命令,用于烧写完毕后,重启系统,User App启动时会向上位机发送Reset回馈表示已经于User App。
Data,接收到的为数据,由上位机发送过来,Bootloader将其写入flash。
DataEnd,上位机发送数据完毕,告诉Bootloader系统可以复位了。
CheckBootloader,上位机发送的命令,用于检查是否在Bootloader中,若在则回馈,若不再不回馈,上位机有超时判断。
Erase,上位机发送命令,下位机接收到命令后,会擦除所有用户程序相关的存储区,包括复位和中断向量表。
#include "McuDrivers/uart/uart.h"
#include "McuDrivers/system/system.h"
#include "McuDrivers/flash/DataRecord.h"
#include "McuDrivers/gpio/gpio.h"
#include "McuDrivers/timer/timer.h"
#include "Protocols/Bootloader.h"
#include "Protocols/UserAppFlash.h"
#include "McuDrivers/flash/InnerFlash.h"
uint8_t receiveData[12]={0},dataIndex=0;
void Uart_Tasks();
uint8_t Time_Tasks();
uint8_t Tick_Tasks();
int main(void)
{
uint8_t run=1;
System_Initialize_g();
Uart_Initial_g(115200);
System_Delay_MS_g(100);
GPIO_LED_D4_Enable_g();
GPIO_LED_D3_Enable_g();
while(run)
{
Uart_Tasks(); //接收数据处理
run = Tick_Tasks();
}
while(1)
{
Uart_Tasks(); //接收数据处理
}
return 0;
}
uint16_t countTick = 0;
uint8_t Tick_Tasks()
{
countTick++;
//晶振为80MHz
//每隔800大约1ms
if(countTick==800)
{
countTick=0;
return Time_Tasks();
}
return 1;
}
uint16_t countTimer=0;
uint8_t Time_Tasks()
{
countTimer++;
if(countTimer==4000)
{
BOOTLOADER_GOTO_8000();
return 0;
}
if(countTimer>4000)
return 0;
if(countTimer%500==0)
GPIO_LED_D3_Toggle_g();
return 1;
}
//串口接收任务
void Uart_Tasks()
{
if(U2STAbits.URXDA==1)
{
uint8_t tmp = Uart_ReadByte();
switch(dataIndex)
{
case 0:
if(tmp==g_Bootloader_Receive_StartFlag[0]) //起始标识1
{
receiveData[0] = g_Bootloader_Receive_StartFlag[0];
dataIndex = 1;
}
else
dataIndex = 0;
break;
case 1:
if(tmp==g_Bootloader_Receive_StartFlag[1]) //起始标识2
{
receiveData[1] = g_Bootloader_Receive_StartFlag[1];
dataIndex = 2;
}
else
dataIndex = 0;
break;
case 10:
if(tmp==g_Bootloader_Receive_EndFlag[0])
{
receiveData[dataIndex] = g_Bootloader_Receive_EndFlag[0];
dataIndex = 11;
}
else
dataIndex = 0;
break;
case 11:
if(tmp==g_Bootloader_Receive_EndFlag[1])
{
receiveData[dataIndex] = g_Bootloader_Receive_EndFlag[1];
AfterBootloader_CmdType result = Bootloader_DataParse(receiveData,12);
//Uart_WriteByte_g(result);
switch(result)
{
case EntryBootloader:
break;
case Reset:
BOOTLOADER_SOFTWARE_RESET();
break;
case Data: //数据
countTimer = 4001; //出现数据即不跳转到用户程序,避免烧录用户程序时出现异常
//UserFlash_EraseIvtAndUserAppBlock();
UserFlash_DataParseAddrData(receiveData,12);
Uart_WriteBytes_g(g_Bootloader_DataReponse,12);
GPIO_LED_D3_Toggle_g();
break;
case DataEnd: //数据结束
GPIO_LED_D4_Enable_g();
GPIO_LED_D3_Enable_g();
Uart_WriteBytes_g(g_Bootloader_DataProgramEndReponse,12);
BOOTLOADER_SOFTWARE_RESET(); //数据刷新完毕,复位
break;
case CheckBootloader: //回馈正处于Bootloader中
Uart_WriteBytes_g(g_Bootloader_CheckBootloaderReponse,12);
break;
case Erase:
UserFlash_EraseIvtAndUserAppBlock();
Uart_WriteBytes_g(g_Bootloader_EraseFlashReponse,12);
break;
default:
break;
}
}
dataIndex = 0;
break;
default:
receiveData[dataIndex] = tmp; dataIndex++;
break;
}
}
}
在数据处理上,由于dsPIC33EP256GP506只支持双指令字编程,所以我们接收到2个数据才会判断然后写入flash,考虑到最后肯定是配置字,而此处配置字是无法写入的,所以不考虑数据个数是否是奇数(奇数会导致最后一个数据漏写)情况了。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

