
实验七 基于mpu6050的体感小车
今天是8月20日,然而这和我并没有什么关系,七夕怎么了,给它脸它就是七夕,不给它脸充其量就是个星期四罢了(ps额,暴露我单身汪的身份了),楼主在这里祝大家情人节快乐,我还是继续呆在家调试代码吧,免得在外面要承受成吨的真实伤害………
好了,现在切入正题,我来带领大家一步一步做出属于自己的体感平衡小车 。
首先,我们先准备一些需要额外用到的材料:
-
stm32的最小系统版(ps开发板也行)
-
mpu6050陀螺仪模块
-
Nrf24l01+模块×2
-
双母头杜邦线若干
有了这些材料,考虑到每个人的基础还不一样,所以我们还需要先储备一点点的关于mpu6050的基础知识。首先我们来看看原理图吧:
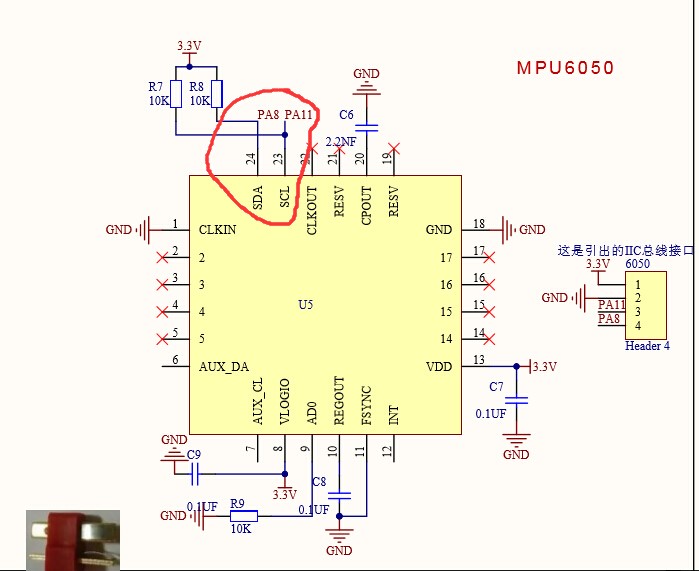
大家看这上面只有两个io口连接到了cpu上面,就是我圈出的两根线,这两根线是I2C总线的信号线,SDA是双向数据线,SCL是时钟线SCL。在I2C 总线上传送数据,首先送最高位,由主机发出启动信号,SDA在SCL 高电平期间由高电平跳变为低电平,然后由主机发送一个字节的数据。数据传送完毕,由主机发出停止信号,SDA在SCL 高电平期间由低电平跳变为高电平。
如果大家不怎么明白的话,也没什么关系,原理图这玩意儿也确实刚开始不好懂,我还为大家准备了一个更直观的图片:

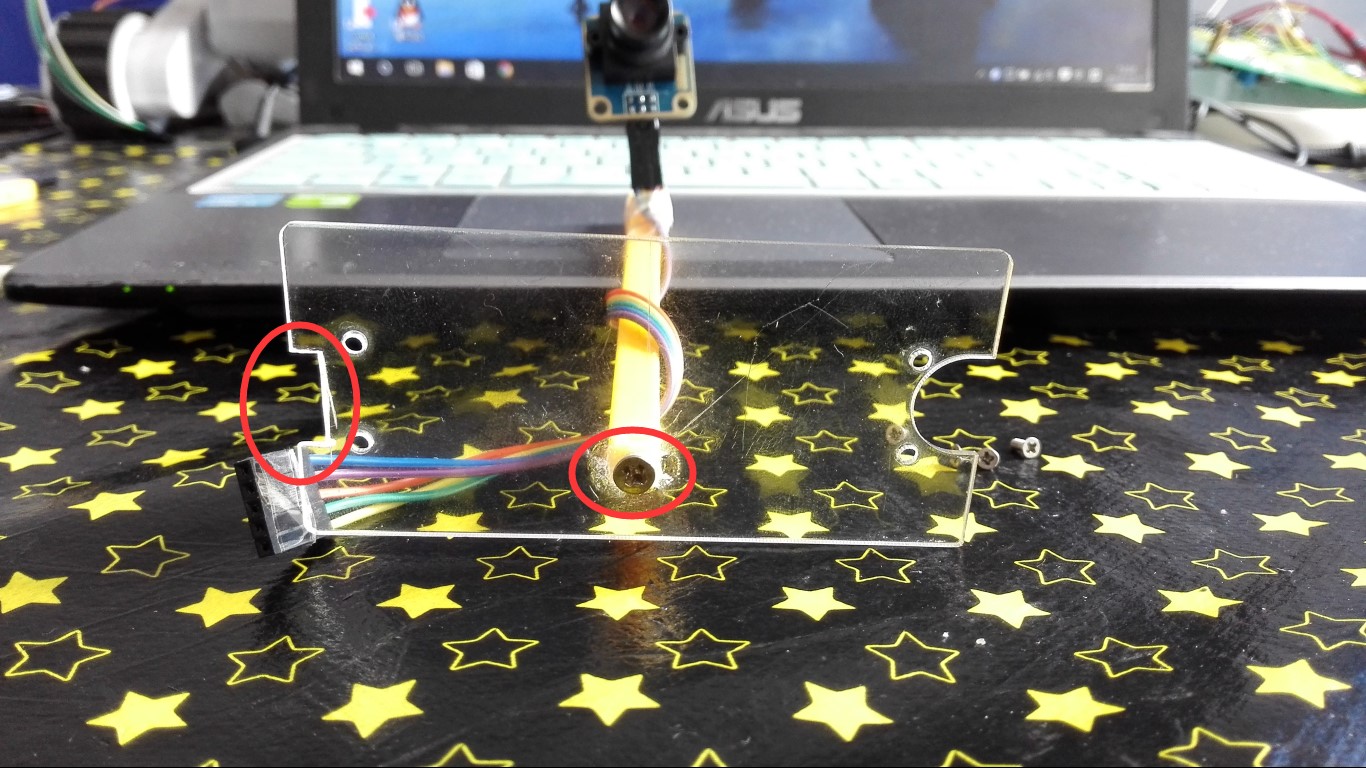
这下大家看清楚了吧,只需要把这四个引脚连上stm32的最小系统上并且给发射端(最小系统)和接收端(小车)分别装上nrf24l01+无线模块(某宝上5块钱能买到)就完成硬件部分的连接了,从原理图上很清楚的看到将SCL连接PA11,SDA 连接PA8,然后连上VCC和GND就好了,大家不是很明白的可以看视频里面的详细解说。
然后我们科普一下mpu6050陀螺仪的性能。为了方便大家观看,我借用一下版主的关于移植DMP的帖子的部分内容,希望版主不要介意,我会注明出处:
以下内容为版主原著:
我们期望得到的是姿态数据,也就是平衡小车的倾角。要得到平衡小车的倾角,就得利用我们的原始数据,进行姿态融合解算,这个比较复杂,知识点比较多,初学者不易掌握。其实, MPU6050 自带了数字运动处理器, 即 DMP(Digital Motion Processing), 并且InvenSense提供了一个 MPU6050 的嵌入式运动驱动库, 结合 MPU6050 的 DMP, 可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到 yaw、roll 和 pitch。
使用内置的 DMP,简化了平衡小车的代码设计,且单片机不用进行姿态解算过程,在一定程度上降低了 MCU 的负担,从而有更多的时间去处理其他事件,提高系统实时性(其实卡尔曼滤波和互补滤波在STM32里面也没花多少时间)。更重要的是,让大家可以不需要接触复杂的滤波算法就可以直接得到平衡小车倾角。
使用 MPU6050 的 DMP 输出的四元数是 q30 格式的, 也就是浮点数放大了 2 的 30 次方倍。在换算成欧拉角之前,必须先将其转换为浮点数,也就是除以 2 的 30 次方,然后再进行计算,
计算公式为:
q0=quat[0] / q30; //q30 格式转换为浮点数
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
pitch=asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; //俯仰角
roll=atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; //横滚角
yaw=atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //航向角
这里,我们是做平衡小车而不是四轴飞行器,所以,仅仅使用pitch就行了。其他两个角度直接在程序中屏蔽了,因为反三角函数运算在STM32F1中还是需要不少时间的。
相信看了版主的详细讲解之后我们对陀螺仪有了一个初步的了解,通俗点说就是mpu6050自带DMP,可以直接输出四元数,四元数通过公式就可以转换为欧拉角了。至于什么事欧拉角(ps也就是版主写的yaw、roll 和 pitch), 接下来我们进入一段通俗易懂的小视频了解一下欧拉角(要看完哦):
相信大家看完这段视频就已经了解了欧拉角了吧。而我们的体感小车就需要用到这个里面的roll 和 pitch角来控制前后和左右了。
好了,基础知识已经说完了,下面来仔细的看看代码部分,其实代码部分和上一个实验很像的,小车上的接收程序和实验6完全一样,大家如果没有看不知道怎么改程序的话可以去13楼看看,我就不在做过多解释了,我们着重点在接收部分吗,大家仔细看,其实很简单。
我用的接收端程序是在正点原子stm32mini板例程24无线通信实验的基础上移植修改的,这里将此例程给大家,大家如果想自己去移植DMP的话也可以,给个版主的帖子传送门:http://forum.eepw.com.cn/thread/274797/1
我就不谈怎么移植DMP了,直接讲解移植好的代码吧:
首先,在mpu6050.c(注意是接收端代码)里面,我们将”读取MPU6050内置DMP的姿态信息的函数”(第293行开始)做一些改动让其可以得到Pitch和Rool的返回值。
我们可以通过串口来连接电脑来看看:
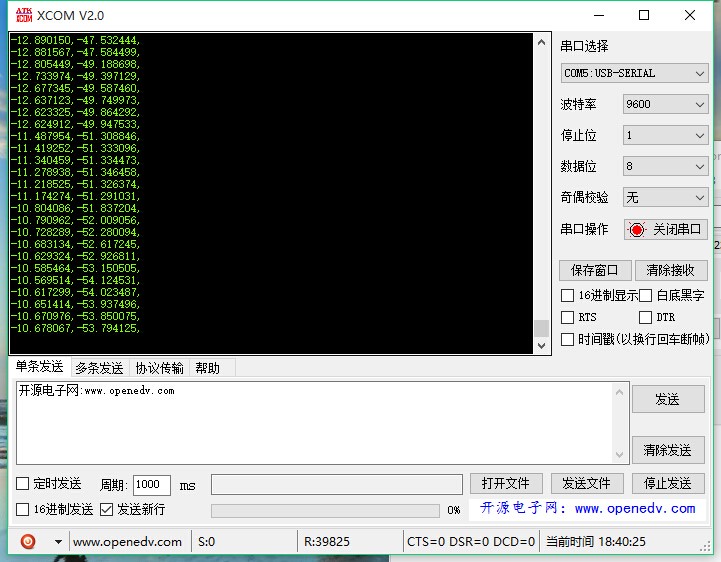
这上面是以浮点型显示的Pitch和Rool的值。
这是代码:
float qianhou(void) //前后
{
unsigned long sensor_timestamp;
unsigned char more;
long quat[4];
dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more);
if (sensors & INV_WXYZ_QUAT )
{
q0=quat[0] / q30;
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; //四元数转欧拉角公式
printf("%f,%f,\r\n",Pitch,Rool);
return Pitch;//得到Pitch角
}
}
float zuoyou(void) //左右
{
unsigned long sensor_timestamp;
unsigned char more;
long quat[4];
dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more);
if (sensors & INV_WXYZ_QUAT )
{
q0=quat[0] / q30;
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
Rool = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3;//四元数转欧拉角公式
return Rool;//得到Rool角
}
}
然后利用Pitch角和Rool角用一些if语句做出判断,和之前的按键差不多,我贴一下核心的代码:
while(1)
{
zuoyou();
qianhou();
a=zuoyou();
b=qianhou();
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
if(a<-15) tmp_buf[1]=70; else if(b>15) tmp_buf[1]=50;
else if(b<-15) tmp_buf[1]=40; else tmp_buf[1]=30; } }
但是和之前又有一些区别,这几个问题让我调了很长时间,这里告诉大家,大家就不用浪费时间了。
问题一、
由于mpu6050陀螺仪模块很灵敏,所以if语句里面是if(b>15)和if(b<-15),而不是if(b>0)和if(b<-0).
问题二、
每个if语句之间要有顺序,要用if else 语句,不能是并列关系;
问题三、
如果同时加入左右控制的话,就会有很大的干扰识别不准,可能是我的程序没写好,大家可以改进了跟帖告诉我,但是我想到了一个解决的办法,因为我们的小车是两轮的,独家支持原地360度无死角的旋转,所以我们可以用右转来代替左右转,而向左倾斜的时候就不给信号,这样稍微向左倾的时候控制前后就特别的灵敏并且没有任何干扰。详细的操控方法请看下面这段演示视频:
后期还会重新拍摄新的视频,谢谢大家观看。
最后,附上发送接收端的代码打包给大家,我也履行了和大家的七夕约定,更新了这贴作为大家的礼物,祝大家七夕情人节快乐 !!!
!!!






 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

