
無線信息雙向監控系統項目正式啟動
用到的RL78/G13 MCU的資源如下:
UART0:與GPS模塊進行通訊
UART2:與上位機進行通訊
Timer:LED控制、計時、外部信號測量
PWM:驅動蜂史鳴器,控制馬達
RTC:系統時間
AD:測量電壓、溫度、濕度
外部中斷:系統喚醒、
Data flash:斷電記憶數據
IO 驅動LCD:顯示數據
WDT
LVD
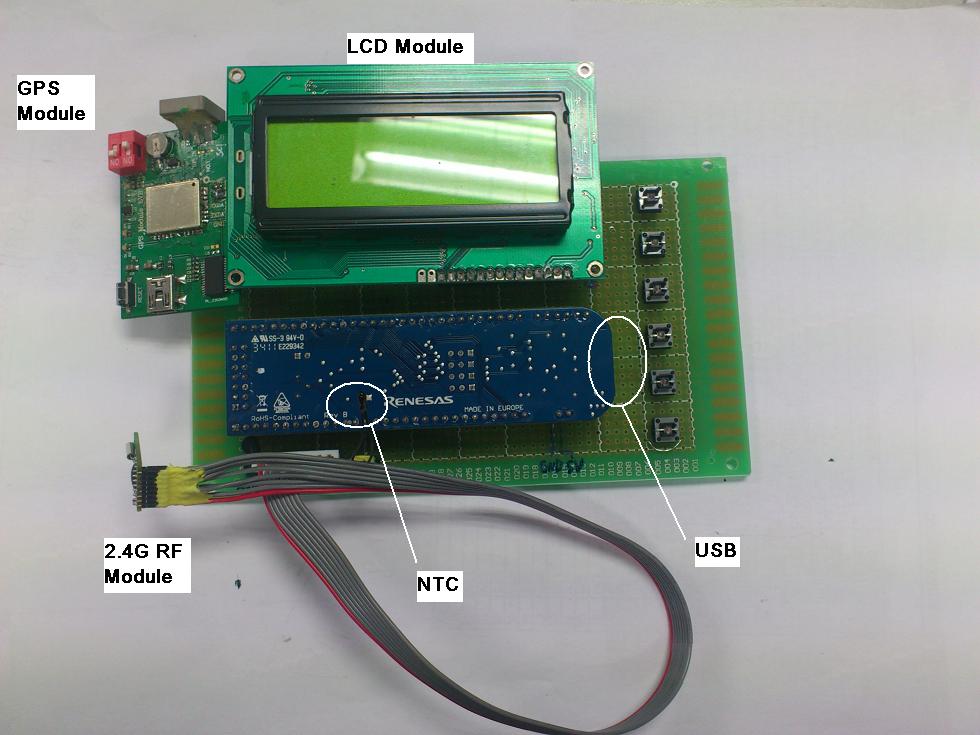
下面是Demo的圖片
GPS模塊用于定位終端的位置
LCD模塊用于顯示系統信息、菜單、接收到的公告信息
USB用于與上位機交換數據
2.4G RF模塊用于與附件其它終端交換信息
由於放了長期,很久沒更新了。
我的上位機程序也做得差不多了。
下面展示一下給大家看看:
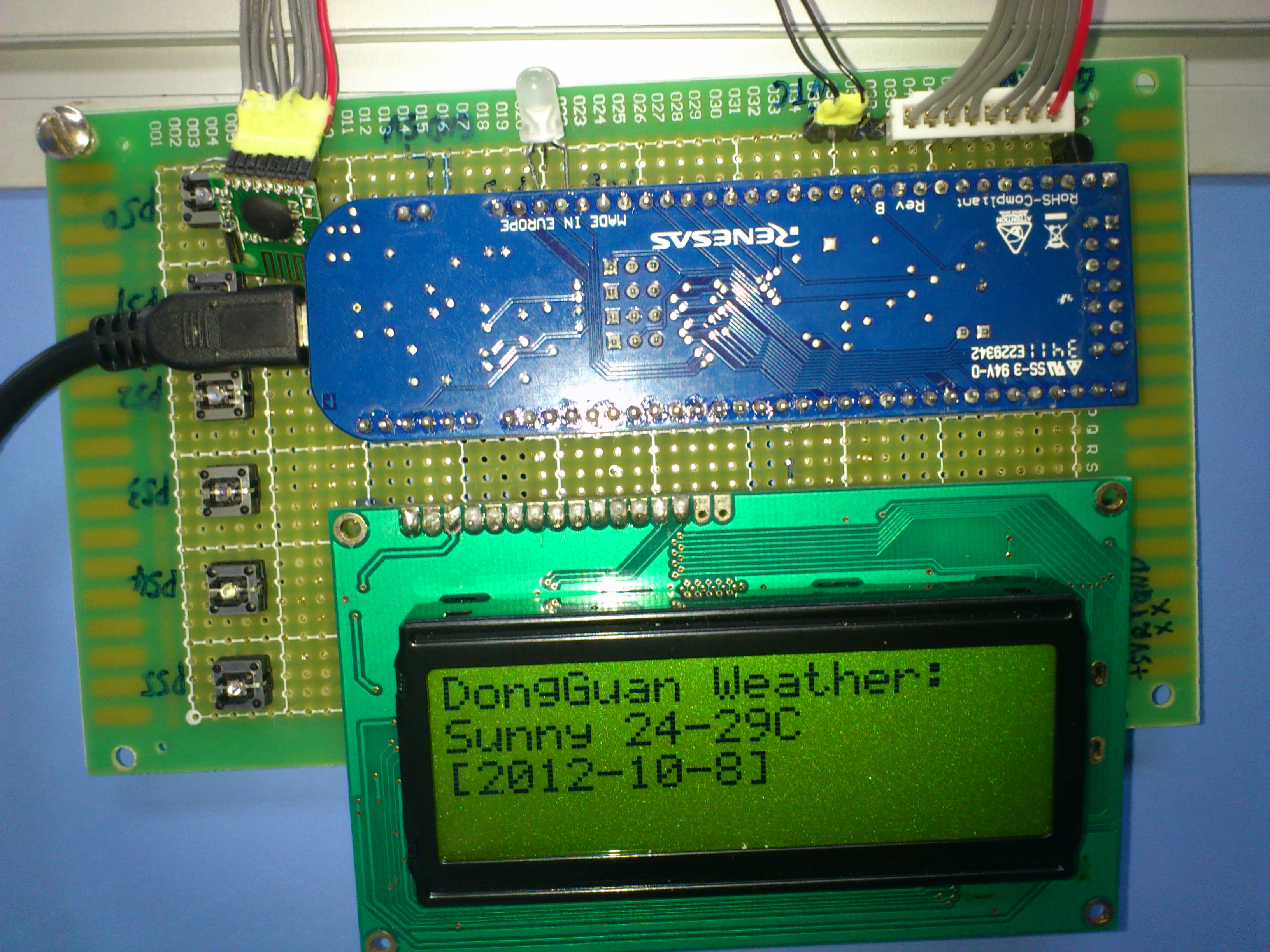
1、首先用RL78/G13 板做了一個終端,可以用于收發其它終端的信息及各種數據:
2、由於我做的無線信息收發系統,我用另一塊板做了另一個終端用于測試:

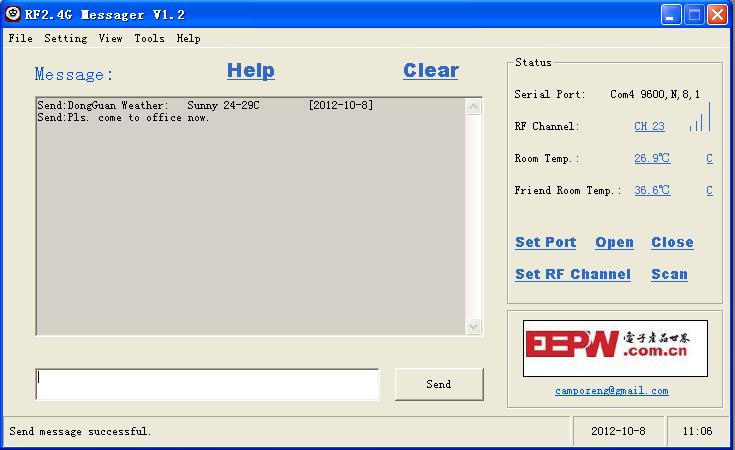
3.通過上位機發送信息,則無線網絡範圍內的所有終端均可收到信息:
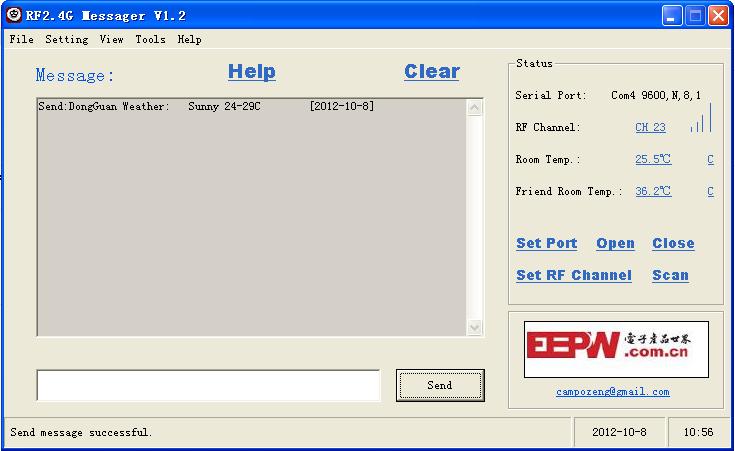
4.收到信息的終終端如果連接上位機,也會將信息上報至上位機:

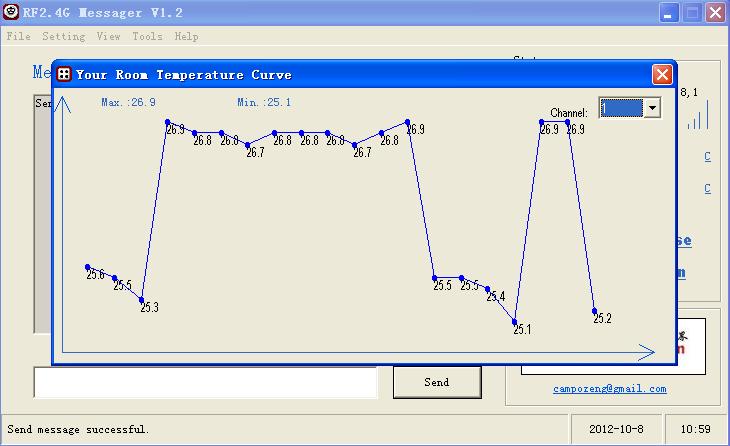
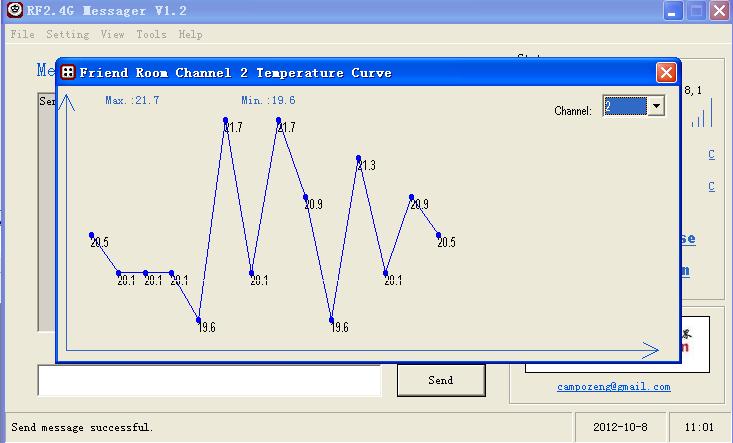
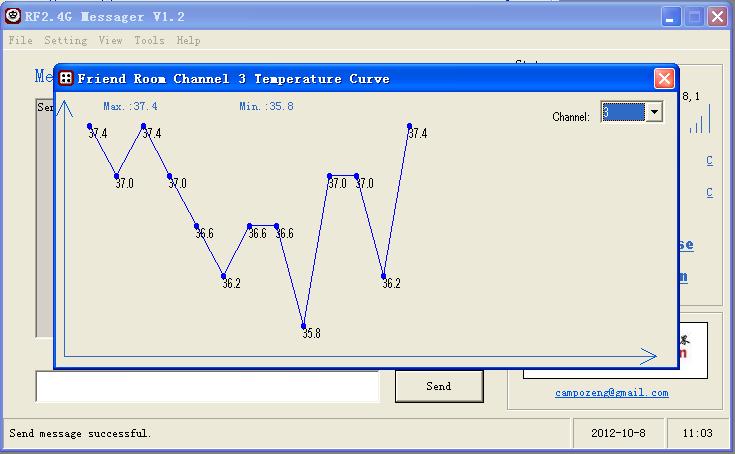
5.上位機不僅可以收發隨意發送的信息,也將監測所有終端的各種數據,下面是附近終端的溫度數據:
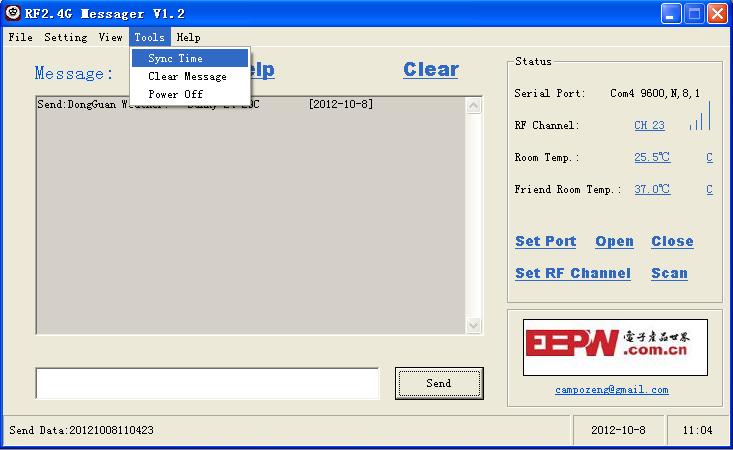
6.系統特有的一鍵時間同步功能,如下圖,如果點一下“Sync Time”,剛所有接入網絡的終端將會同步時間:
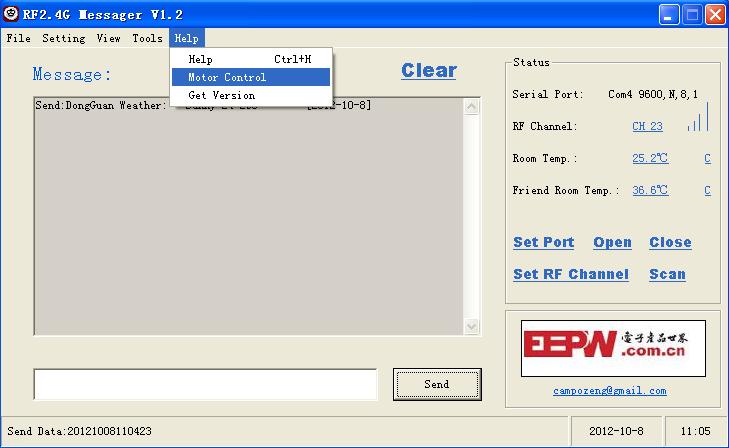
7.系統特有的馬達控制功能(Motor Control),因為有的終端會帶有攝像頭,可以用此功能控制攝像頭的方向。
8.通過此系統,可以發送信息通知終端持有者,如發信息給他,“回辦公室”:
9.終端持有者也可以私聊,將信息發至指定用戶,就像QQ一樣,可以自由聊天。
更多功能就不一一描述了。
我的上位機程序也做得差不多了。
下面展示一下給大家看看:
1、首先用RL78/G13 板做了一個終端,可以用于收發其它終端的信息及各種數據:
2、由於我做的無線信息收發系統,我用另一塊板做了另一個終端用于測試:
3.通過上位機發送信息,則無線網絡範圍內的所有終端均可收到信息:
4.收到信息的終終端如果連接上位機,也會將信息上報至上位機:
5.上位機不僅可以收發隨意發送的信息,也將監測所有終端的各種數據,下面是附近終端的溫度數據:
6.系統特有的一鍵時間同步功能,如下圖,如果點一下“Sync Time”,剛所有接入網絡的終端將會同步時間:
7.系統特有的馬達控制功能(Motor Control),因為有的終端會帶有攝像頭,可以用此功能控制攝像頭的方向。
8.通過此系統,可以發送信息通知終端持有者,如發信息給他,“回辦公室”:
9.終端持有者也可以私聊,將信息發至指定用戶,就像QQ一樣,可以自由聊天。
更多功能就不一一描述了。
SD卡讀寫學習
SD卡的引脚定义:


SD卡的SPI通信接口使其可以通过SPI通道进行数据读写。从应用的角度来看,采用SPI接口的好处在于,很多单片机内部自带SPI控制器,不光给开发上带来方便,同时也见降低了开发成本。然而,它也有不好的地方,如失去了SD卡的性能优势,要解决这一问题,就要用SD方式,因为它提供更大的总线数据带宽。SPI接口的选用是在上电初始时向其写入第一个命令时进行的。以下介绍SD卡的驱动方法,只实现简单的扇区读写。
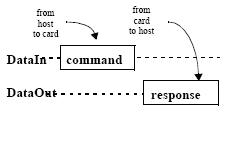
1) 命令与数据传输
1. 命令传输
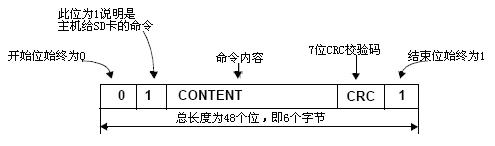
SD卡自身有完备的命令系统,以实现各项操作。命令格式如下:
命令的传输过程采用发送应答机制,过程如下:
SD卡的引脚定义:
SD卡引脚功能详述:
|
引脚 编号 |
SD模式 |
SPI模式 |
||||
|
名称 |
类型 |
描述 |
名称 |
类型 |
描述 |
|
|
1 |
CD/DAT3 |
IO或PP |
卡检测/ 数据线3 |
#CS |
I |
片选 |
|
2 |
CMD |
PP |
命令/ 回应 |
DI |
I |
数据输入 |
|
3 |
VSS1 |
S |
电源地 |
VSS |
S |
电源地 |
|
4 |
VDD |
S |
电源 |
VDD |
S |
电源 |
|
5 |
CLK |
I |
时钟 |
SCLK |
I |
时钟 |
|
6 |
VSS2 |
S |
电源地 |
VSS2 |
S |
电源地 |
|
7 |
DAT0 |
IO或PP |
数据线0 |
DO |
O或PP |
数据输出 |
|
8 |
DAT1 |
IO或PP |
数据线1 |
RSV |
|
|
|
9 |
DAT2 |
IO或PP |
数据线2 |
RSV |
|
|
注:S:电源供给 I:输入 O:采用推拉驱动的输出
PP:采用推拉驱动的输入输出
SD卡支持两种总线方式:SD方式与SPI方式。其中SD方式采用6线制,使用CLK、CMD、DAT0~DAT3进行数据通信。而SPI方式采用4线制,使用CS、CLK、DataIn、DataOut进行数据通信。SD方式时的数据传输速度与SPI方式要快,采用单片机对SD卡进行读写时一般都采用SPI模式。采用不同的初始化方式可以使SD卡工作于SD方式或SPI方式。这里只对其SPI方式进行介绍。
(2) SPI方式驱动SD卡的方法SD卡的SPI通信接口使其可以通过SPI通道进行数据读写。从应用的角度来看,采用SPI接口的好处在于,很多单片机内部自带SPI控制器,不光给开发上带来方便,同时也见降低了开发成本。然而,它也有不好的地方,如失去了SD卡的性能优势,要解决这一问题,就要用SD方式,因为它提供更大的总线数据带宽。SPI接口的选用是在上电初始时向其写入第一个命令时进行的。以下介绍SD卡的驱动方法,只实现简单的扇区读写。
1) 命令与数据传输
1. 命令传输
SD卡自身有完备的命令系统,以实现各项操作。命令格式如下:
命令的传输过程采用发送应答机制,过程如下:
每一个命令都有自己命令应答格式。在SPI模式中定义了三种应答格式,如下表所示:
| 字节 | 位 | 含义 |
| 1 | 7 | 开始位,始终为0 |
| 6 | 参数错误 | |
| 5 | 地址错误 | |
| 4 | 擦除序列错误 | |
| 3 | CRC错误 | |
| 2 | 非法命令 | |
| 1 | 擦除复位 | |
| 0 | 闲置状态 |
| 字节 | 位 | 含义 |
| 1 | 7 | 开始位,始终为0 |
| 6 | 参数错误 | |
| 5 | 地址错误 | |
| 4 | 擦除序列错误 | |
| 3 | CRC错误 | |
| 2 | 非法命令 | |
| 1 | 擦除复位 | |
| 0 | 闲置状态 | |
| 2 | 7 | 溢出,CSD覆盖 |
| 6 | 擦除参数 | |
| 5 | 写保护非法 | |
| 4 | 卡ECC失败 | |
| 3 | 卡控制器错误 | |
| 2 | 未知错误 | |
| 1 | 写保护擦除跳过,锁/解锁失败 | |
| 0 | 锁卡 |
| 字节 | 位 | 含义 |
| 1 | 7 | 开始位,始终为0 |
| 6 | 参数错误 | |
| 5 | 地址错误 | |
| 4 | 擦除序列错误 | |
| 3 | CRC错误 | |
| 2 | 非法命令 | |
| 1 | 擦除复位 | |
| 0 | 闲置状态 | |
| 2~5 | 全部 | 操作条件寄存器,高位在前 |
RL78/G13 SD卡讀寫學習
写命令的例程:
首先用Applilet 生成基礎代碼,設置如下:
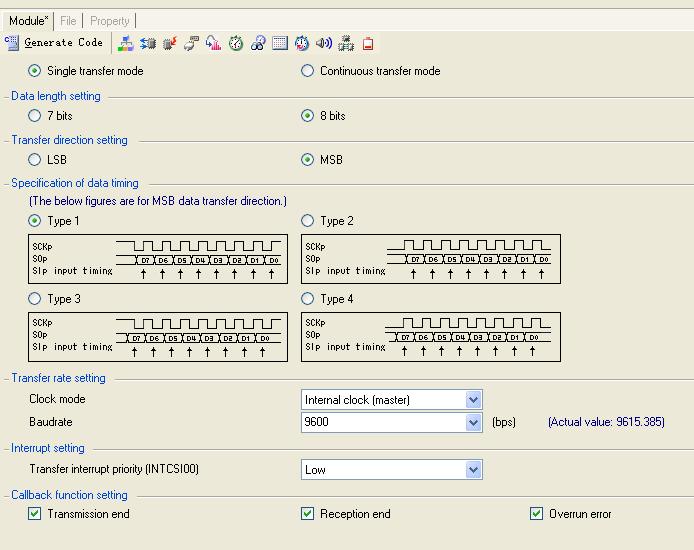
把要發送的命令放進TxBuffer,返回的回應將存放在RxBuffer
CSI00_SendReceiveData(TxBuffer,Num, RxBuffer);
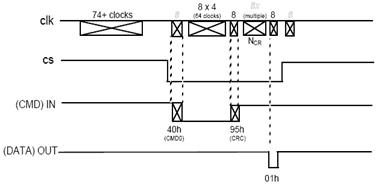
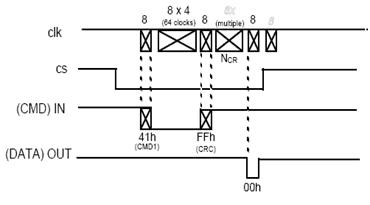
SD卡初始化
SD卡的初始化是非常重要的,只有进行了正确的初始化,才能进行后面的各项操作。在初始化过程中,SPI的时钟不能太快,否则会造初始化失败。在初始化成功后,应尽量提高SPI的速率。在刚开始要先发送至少74个时钟信号,这是必须的。在很多读者的实验中,很多是因为疏忽了这一点,而使初始化不成功。随后就是写入两个命令CMD0与CMD1,使SD卡进入SPI模式
初始化时序图:
初始化例程:
//--------------------------------------------------------------------------
初始化SD卡到SPI模式
//--------------------------------------------------------------------------
UCHAR SD_Init()
{
UCHAR retry,temp;
UCHAR i;
CMD[] = {0x40,0x00,0x00,0x00,0x00,0x95};
SD_Port_Init(); //初始化驱动端口
Init_Flag=1; //将初始化标志置1 for (i=0;i<0x0f;i++)
{
Write_Byte_SD(0xff); //发送至少74个时钟信号
}
//向SD卡发送CMD0
retry=0;
do
{ //为了能够成功写入CMD0,在这里写200次
temp=Write_Command_SD(CMD);
retry++;
if(retry==200)
{ //超过200次
return(INIT_CMD0_ERROR);//CMD0 Error!
}
}
while(temp!=1); //回应01h,停止写入
//发送CMD1到SD卡
CMD[0] = 0x41; //CMD1
CMD[5] = 0xFF;
retry=0;
do
{ //为了能成功写入CMD1,写100次
temp=Write_Command_SD(CMD);
retry++;
if(retry==100)
{ //超过100次
return(INIT_CMD1_ERROR);//CMD1 Error!
}
}
while(temp!=0);//回应00h停止写入
Init_Flag=0; //初始化完毕,初始化标志清零
SPI_CS=1; //片选无效
return(0); //初始化成功
}
它的读取时序如下:
读取CSD 的时序:
读取SD卡信息
综合上面对CID与CSD寄存器的读取,可以知道很多关于SD卡的信息
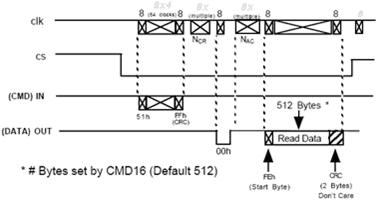
扇区读
扇区读是对SD卡驱动的目的之一。SD卡的每一个扇区中有512个字节,一次扇区读操作将把某一个扇区内的512个字节全部读出。过程很简单,先写入命令,在得到相应的回应后,开始数据读取。
扇区读的时序:
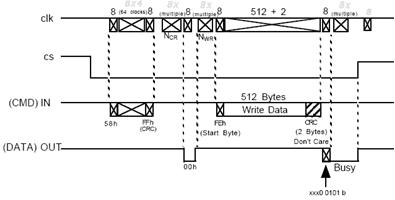
扇区写
扇区写是SD卡驱动的另一目的。每次扇区写操作将向SD卡的某个扇区中写入512个字节。过程与扇区读相似,只是数据的方向相反与写入命令不同而已。
扇区写的时序:
写命令的例程:
首先用Applilet 生成基礎代碼,設置如下:
把要發送的命令放進TxBuffer,返回的回應將存放在RxBuffer
CSI00_SendReceiveData(TxBuffer,Num, RxBuffer);
SD卡初始化
SD卡的初始化是非常重要的,只有进行了正确的初始化,才能进行后面的各项操作。在初始化过程中,SPI的时钟不能太快,否则会造初始化失败。在初始化成功后,应尽量提高SPI的速率。在刚开始要先发送至少74个时钟信号,这是必须的。在很多读者的实验中,很多是因为疏忽了这一点,而使初始化不成功。随后就是写入两个命令CMD0与CMD1,使SD卡进入SPI模式
初始化时序图:
初始化例程:
//--------------------------------------------------------------------------
初始化SD卡到SPI模式
//--------------------------------------------------------------------------
UCHAR SD_Init()
{
UCHAR retry,temp;
UCHAR i;
CMD[] = {0x40,0x00,0x00,0x00,0x00,0x95};
SD_Port_Init(); //初始化驱动端口
Init_Flag=1; //将初始化标志置1 for (i=0;i<0x0f;i++)
{
Write_Byte_SD(0xff); //发送至少74个时钟信号
}
//向SD卡发送CMD0
retry=0;
do
{ //为了能够成功写入CMD0,在这里写200次
temp=Write_Command_SD(CMD);
retry++;
if(retry==200)
{ //超过200次
return(INIT_CMD0_ERROR);//CMD0 Error!
}
}
while(temp!=1); //回应01h,停止写入
//发送CMD1到SD卡
CMD[0] = 0x41; //CMD1
CMD[5] = 0xFF;
retry=0;
do
{ //为了能成功写入CMD1,写100次
temp=Write_Command_SD(CMD);
retry++;
if(retry==100)
{ //超过100次
return(INIT_CMD1_ERROR);//CMD1 Error!
}
}
while(temp!=0);//回应00h停止写入
Init_Flag=0; //初始化完毕,初始化标志清零
SPI_CS=1; //片选无效
return(0); //初始化成功
}
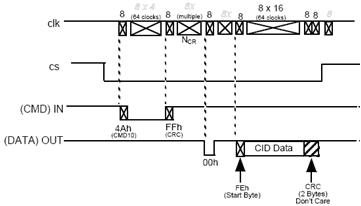
读取CID
CID寄存器存储了SD卡的标识码。每一个卡都有唯一的标识码。
CID寄存器长度为128位。它的寄存器结构如下:
|
名称 |
域 |
数据宽度 |
CID划分 |
|
生产标识号 |
MID |
8 |
[127:120] |
|
OEM/应用标识 |
OID |
16 |
[119:104] |
|
产品名称 |
PNM |
40 |
[103:64] |
|
产品版本 |
PRV |
8 |
[63:56] |
|
产品序列号 |
PSN |
32 |
[55:24] |
|
保留 |
- |
4 |
[23:20] |
|
生产日期 |
MDT |
12 |
[19:8] |
|
CRC7校验合 |
CRC |
7 |
[7:1] |
|
未使用,始终为1 |
- |
1 |
[0:0] |
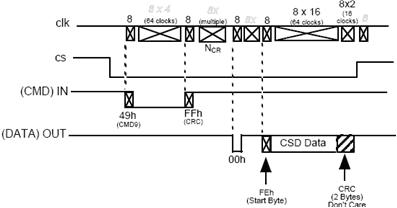
读取CSD
CSD(Card-Specific Data)寄存器提供了读写SD卡的一些信息。其中的一些单元可以由用户重新编程。具体的CSD结构如下:
|
名称 |
域 |
数据宽度 |
单元类型 |
CSD划分 |
|
CSD结构 |
CSD_STRUCTURE |
2 |
R |
[127:126] |
|
保留 |
- |
6 |
R |
[125:120] |
|
数据读取时间1 |
TAAC |
8 |
R |
[119:112] |
|
数据在CLK周期内读取时间2(NSAC*100) |
NSAC |
8 |
R |
[111:104] |
|
最大数据传输率 |
TRAN_SPEED |
8 |
R |
[103:96] |
|
卡命令集合 |
CCC |
12 |
R |
[95:84] |
|
最大读取数据块长 |
READ_BL_LEN |
4 |
R |
[83:80] |
|
允许读的部分块 |
READ_BL_PARTIAL |
1 |
R |
[79:79] |
|
非线写块 |
WRITE_BLK_MISALIGN |
1 |
R |
[78:78] |
|
非线读块 |
READ_BLK_MISALIGN |
1 |
R |
[77:77] |
|
DSR条件 |
DSR_IMP |
1 |
R |
[76:76] |
|
保留 |
- |
2 |
R |
[75:74] |
|
设备容量 |
C_SIZE |
12 |
R |
[73:62] |
|
最大读取电流@VDD min |
VDD_R_CURR_MIN |
3 |
R |
[61:59] |
|
最大读取电流@VDD max |
VDD_R_CURR_MAX |
3 |
R |
[58:56] |
|
最大写电流@VDD min |
VDD_W_CURR_MIN |
3 |
R |
[55:53] |
|
最大写电流@VDD max |
VDD_W_CURR_MAX |
3 |
R |
[52:50] |
|
设备容量乘子 |
C_SIZE_MULT |
3 |
R |
[49:47] |
|
擦除单块使能 |
ERASE_BLK_EN |
1 |
R |
[46:46] |
|
擦除扇区大小 |
SECTOR_SIZE |
7 |
R |
[45:39] |
|
写保护群大小 |
WP_GRP_SIZE |
7 |
R |
[38:32] |
|
写保护群使能 |
WP_GRP_ENABLE |
1 |
R |
[31:31] |
|
保留 |
- |
2 |
R |
[30:29] |
|
写速度因子 |
R2W_FACTOR |
3 |
R |
[28:26] |
|
最大写数据块长度 |
WRITE_BL_LEN |
4 |
R |
[25:22] |
|
允许写的部分部 |
WRITE_BL_PARTIAL |
1 |
R |
[21:21] |
|
保留 |
- |
5 |
R |
[20:16] |
|
文件系统群 |
FILE_OFRMAT_GRP |
1 |
R/W |
[15:15] |
|
拷贝标志 |
COPY |
1 |
R/W |
[14:14] |
|
永久写保护 |
PERM_WRITE_PROTECT |
1 |
R/W |
[13:13] |
|
暂时写保护 |
TMP_WRITE_PROTECT |
1 |
R/W |
[12:12] |
|
文件系统 |
FIL_FORMAT |
2 |
R/W |
[11:10] |
|
保留 |
- |
2 |
R/W |
[9:8] |
|
CRC |
CRC |
7 |
R/W |
[7:1] |
|
未用,始终为1 |
- |
1 |
|
[0:0] |
读取SD卡信息
综合上面对CID与CSD寄存器的读取,可以知道很多关于SD卡的信息
扇区读
扇区读是对SD卡驱动的目的之一。SD卡的每一个扇区中有512个字节,一次扇区读操作将把某一个扇区内的512个字节全部读出。过程很简单,先写入命令,在得到相应的回应后,开始数据读取。
扇区读的时序:
扇区写
扇区写是SD卡驱动的另一目的。每次扇区写操作将向SD卡的某个扇区中写入512个字节。过程与扇区读相似,只是数据的方向相反与写入命令不同而已。
扇区写的时序:
回复
| 有奖活动 | |
|---|---|
| 请大声喊出:我要开发板! | |
| 【有奖活动】EEPW网站征稿正在进行时,欢迎踊跃投稿啦 | |
| 【有奖活动】智能可穿戴设备AR/VR如何引领科技新潮流! | |
| 奖!发布技术笔记,技术评测贴换取您心仪的礼品 | |
| 【有奖活动】震撼来袭!这场直播将直击工程师的心灵! | |
| 打赏帖 | |
|---|---|
| 【换取手持数字示波器】滞回比较电路分析被打赏30分 | |
| 【换取手持数字示波器】电流镜电路分析被打赏20分 | |
| 【换取手持数字示波器】基于状态变量推导实现有源滤波器被打赏20分 | |
| 玩转“DFRobot盖革计数器模块”准备工作认识模块知识分享被打赏30分 | |
| 【换取手持数字示波器】AHT10温度检测分享被打赏40分 | |
| 【换取手持数字示波器】ACM32F070开发板点亮LCD屏和触控按键,串口,ADC被打赏40分 | |
| 【换取手持数字示波器】ACM32F070LCD屏和触控按键功驱动蜂鸣器分享被打赏40分 | |
| 【换取手持数字示波器】国民技术PWM功能知识分享被打赏40分 | |
| 【换取手持数字示波器】放大器运放知识分享被打赏40分 | |
| 【分享评测,赢取加热台】+开关电源AC输入知识分享被打赏30分 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂