
1.两轮平衡车的产品性能评价 http://forum.eepw.com.cn/thread/273290/1#2
2.LED灯的操作--GPIO的处理 http://forum.eepw.com.cn/thread/273290/1#6
3.基本平衡的原理--http://forum.eepw.com.cn/thread/273290/2#11
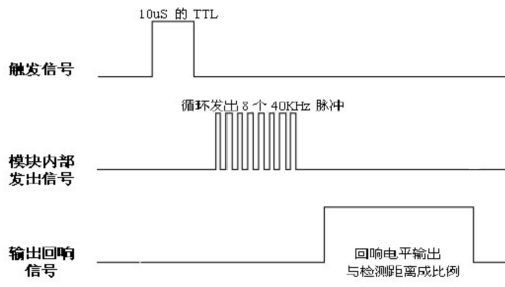
4.超声波模块的说明-http://forum.eepw.com.cn/thread/273290/2#12
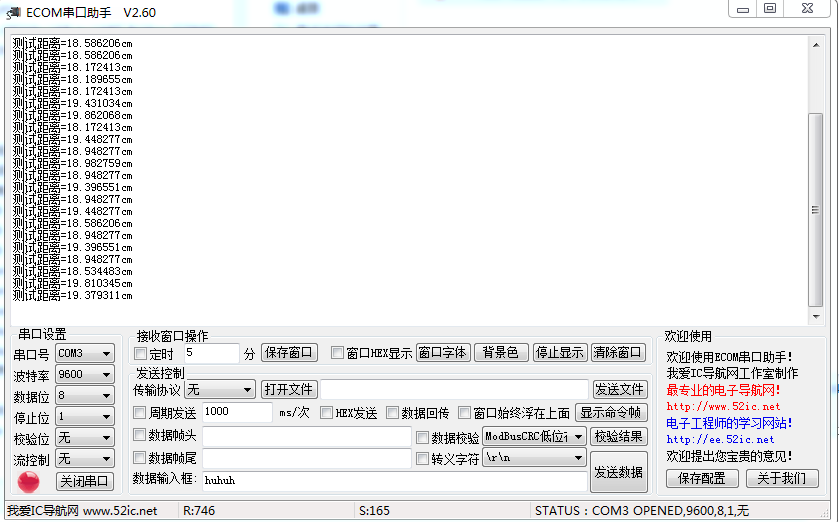
5.超声波模块的使用-http://forum.eepw.com.cn/thread/273290/2#14
6.蓝牙模块的说明-http://forum.eepw.com.cn/thread/273290/2#15
7.直立调试的说明-http://forum.eepw.com.cn/thread/273290/2#16
8.浏览器的刷新问题导致写的一篇超级详细的帖子丢了-http://forum.eepw.com.cn/thread/273290/2#18
9.一些感悟-http://forum.eepw.com.cn/thread/273290/2#19
10.宇宙最强贴之--打造最强的STM32 IDE-http://forum.eepw.com.cn/thread/273290/2#20



 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂