
ENC-03MB是小日本产的单轴陀螺仪。有以下几个特点:
1、供电电压 2.7~5.25
2、参考电压 1.25~1.45 典型值为1.35V
3、比例系数 0.67mV/deg/s
4、静态输出 Vref+/-0.6
需要的Vref为1.35V 手上没有咋办?
站不是搞定了DAC吗?使用DAC输出1.35V参考电压供ENC模块使用
步骤如下:
1、使用前面做过的的DAC实验,输出1.35V电压
使用定时器触发:My_DAC2_Init();将DAC数据寄存器的值设置为0x69
输出后使用三用表测试下,输出1.34V多点
2、ADC初始化
前面也提到过,当时没有电压可测试,值测试了3.3V和0V的输出。
今天拿来实验。由于使用的是DMA方式,只需要读数据就OK了
3、将读出的数据进行简单的滤波串口打印
很简单的滤波,取100次采集到数据的平均值
卡尔曼滤波效果比较不错,可惜俺不会。
while(1)
{
//if(ADC_ConvertedValue>2000)
adctemp+= ADC_ConvertedValue;
i++;
//进行简单的滤波后输出
if(i == 100)
{
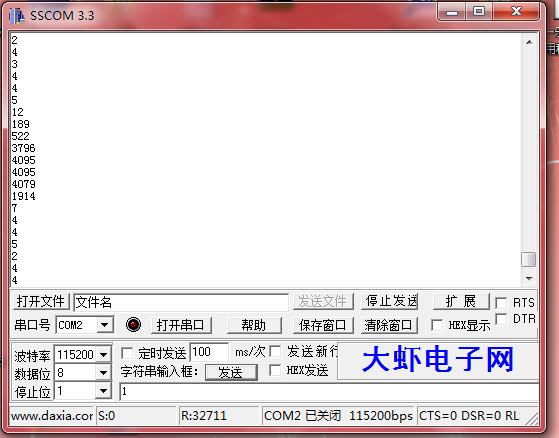
printf("%d\r\n",adctemp/100);
i = 0;
adctemp = 0;
}
}
摇晃陀螺仪时候的输出:
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

