
142楼
试验FSTFS
先定义两个变量
static FATFS fs; //文件系统
static FIL fsrc; //文件
FRESULT res; //操作返回结果
FILINFO finfo; //文件
DIR dirs; //目录
挂接驱动器
disk_initialize(0);
f_mount(0, &fs);
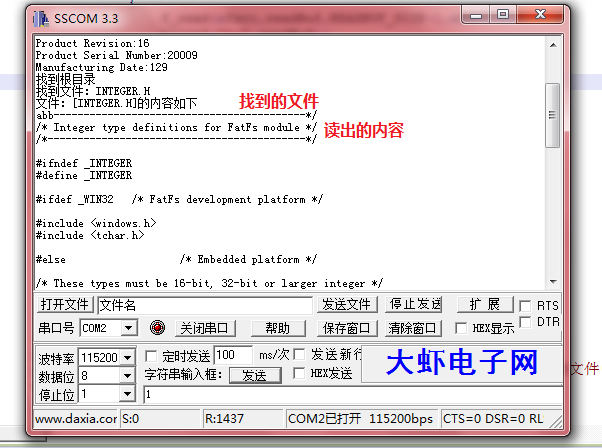
打开文件
f_open(&fsrc, finfo.fname, FA_OPEN_EXISTING | FA_READ | FA_WRITE); //打开以存在文件,可读写
f_lseek(&fsrc, f_size(&fsrc)); //将文件指针移到文件末尾
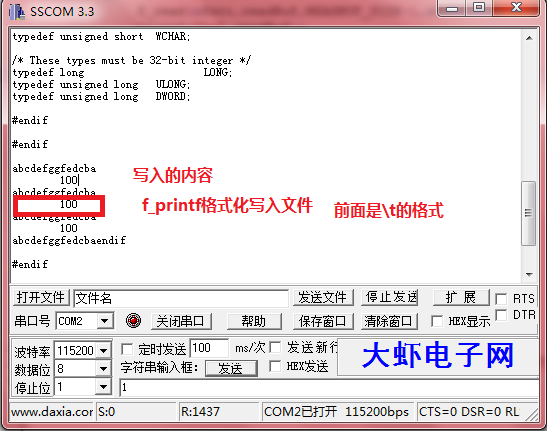
f_puts("abcdefg",&fsrc);
f_puts("gfedcba",&fsrc); //写入文件后,自动移动文件指针到写入位置,不需要在移动指针
f_sync(&fsrc); //将缓存中的文件内容写入磁盘
f_lseek(&fsrc, 0); //移动文件指针以便读取文件
f_read(&fsrc,readBuf,READBUF_SIZE-1,&br); //自动移动文件指针
while(!f_eof(&fsrc)) //检查是否读到了文件末尾
{
f_read(&fsrc,readBuf,READBUF_SIZE-1,&br); //读取文件到缓存
printf("%s",readBuf); //串口输出
}
最后试试f_printf().
f_printf(&fsrc,"\r\n");
f_printf(&fsrc,"\t%d\r\n",i);
结果跟printf 差不多
先定义两个变量
static FATFS fs; //文件系统
static FIL fsrc; //文件
FRESULT res; //操作返回结果
FILINFO finfo; //文件
DIR dirs; //目录
挂接驱动器
disk_initialize(0);
f_mount(0, &fs);
打开文件
f_open(&fsrc, finfo.fname, FA_OPEN_EXISTING | FA_READ | FA_WRITE); //打开以存在文件,可读写
f_lseek(&fsrc, f_size(&fsrc)); //将文件指针移到文件末尾
f_puts("abcdefg",&fsrc);
f_puts("gfedcba",&fsrc); //写入文件后,自动移动文件指针到写入位置,不需要在移动指针
f_sync(&fsrc); //将缓存中的文件内容写入磁盘
f_lseek(&fsrc, 0); //移动文件指针以便读取文件
f_read(&fsrc,readBuf,READBUF_SIZE-1,&br); //自动移动文件指针
while(!f_eof(&fsrc)) //检查是否读到了文件末尾
{
f_read(&fsrc,readBuf,READBUF_SIZE-1,&br); //读取文件到缓存
printf("%s",readBuf); //串口输出
}
最后试试f_printf().
f_printf(&fsrc,"\r\n");
f_printf(&fsrc,"\t%d\r\n",i);
结果跟printf 差不多
143楼
FSMCS RAM读写,跟LCD操作相似。
SRAM初始化之后,直接写数据在一个SRAM范围内的地址就行了,操作相对方便。
LCD相当于在一个固定的SRAM地址读写数据。
根据电路,SRAM使用了FSMC Bank1的SRAM3块。SRAM的基地址是0x68000000,因此定义:
#define Bank1_SRAM3_ADDR ((uint32_t)0x68000000)
下面是我的SRAM初始化程序和读写函数:
void My_SRAM_Init(void)
{
FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure;
FSMC_NORSRAMTimingInitTypeDef p;
GPIO_InitTypeDef GPIO_InitStructure;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOG | RCC_APB2Periph_GPIOE |
RCC_APB2Periph_GPIOF, ENABLE);
/*-- GPIO 设置 ------------------------------------------------------*/
/*!< 数据线配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_8 | GPIO_Pin_9 |
GPIO_Pin_10 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 |
GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 |
GPIO_Pin_15;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/*!< 地址线配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 |
GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_12 | GPIO_Pin_13 |
GPIO_Pin_14 | GPIO_Pin_15;
GPIO_Init(GPIOF, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 |
GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/*!< NOE 和 NWE 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/*!< NE3 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOG, &GPIO_InitStructure);
/*!< NBL0, NBL1 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/*-- FSMC 设置 ------------------------------------------------------*/
p.FSMC_AddressSetupTime = 0; //地址建立时间SRAM读写比LCD块,我的LCD这里是2
p.FSMC_AddressHoldTime = 0; //地址保持时间
p.FSMC_DataSetupTime = 3; //数据建立时间
p.FSMC_BusTurnAroundDuration = 0;
p.FSMC_CLKDivision = 0;
p.FSMC_DataLatency = 0;
p.FSMC_AccessMode = FSMC_AccessMode_A;
FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM3; //选择Bank
FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable;//FSMC_DataAddressMux_Disable;
FSMC_NORSRAMInitStructure.FSMC_MemoryType = FSMC_MemoryType_SRAM;
FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;
FSMC_NORSRAMInitStructure.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &p;
FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &p;
FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure);
/*!< 使能该bank Enable FSMC Bank1_SRAM Bank */
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM3, ENABLE);
}
将缓存数据写入SRAM
void My_SRAM_WriteBuffer(uint16_t* pBuffer, uint32_t WriteAddr, uint32_t NumHalfwordToWrite)
{
for(; NumHalfwordToWrite != 0; NumHalfwordToWrite--) /*!< while there is data to write */
{
/*!< Transfer data to the memory */
*(uint16_t *) (Bank1_SRAM3_ADDR + WriteAddr) = *pBuffer++;
/*!< Increment the address*/
WriteAddr += 2;
}
}
读出SRAM中的数据到SRAM
void My_SRAM_ReadBuffer(uint16_t* pBuffer, uint32_t ReadAddr, uint32_t NumHalfwordToRead)
{
for(; NumHalfwordToRead != 0; NumHalfwordToRead--) /*!< while there is data to read */
{
/*!< Read a half-word from the memory */
*pBuffer++ = *(__IO uint16_t*) (Bank1_SRAM3_ADDR + ReadAddr);
/*!< Increment the address*/
ReadAddr += 2;
}
}
填充缓冲:
void Fill_Buffer(uint16_t *pBuffer, uint16_t BufferLenght, uint32_t Offset)
{
uint16_t IndexTmp = 0;
/* Put in global buffer same values */
for (IndexTmp = 0; IndexTmp < BufferLenght; IndexTmp++ )
{
pBuffer[IndexTmp] = IndexTmp + Offset;
}
}
主函数中调用:
for(i=0;i<BUFFER_SIZE;i++) //显示RxBuffer内容,以便对比
{
printf("%X\t",RdBuffer[i]);
}
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC, ENABLE); //前次忘记FSMC开时钟了,所以读不出来
My_SRAM_Init(); //初始化FSMC SRAM
Fill_Buffer(WrBuffer, BUFFER_SIZE, 0); //向写入数据的缓冲中写内容
My_SRAM_WriteBuffer(WrBuffer, WRITE_READ_ADDR, BUFFER_SIZE); //将缓冲中的内容写入SRAM
My_SRAM_ReadBuffer(RdBuffer, WRITE_READ_ADDR, BUFFER_SIZE); //读出
for(i=0;i<BUFFER_SIZE;i++) //显示内容
{
printf("%X\t",RdBuffer[i]);
}
最后 上图:
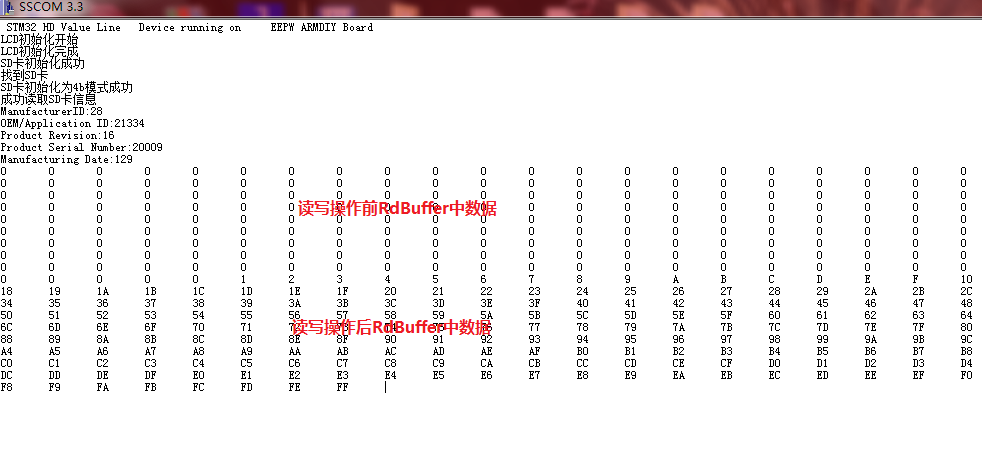
读SD卡数据到SRAM中,将SRAM当作个缓冲也不错哦。
SRAM初始化之后,直接写数据在一个SRAM范围内的地址就行了,操作相对方便。
LCD相当于在一个固定的SRAM地址读写数据。
根据电路,SRAM使用了FSMC Bank1的SRAM3块。SRAM的基地址是0x68000000,因此定义:
#define Bank1_SRAM3_ADDR ((uint32_t)0x68000000)
下面是我的SRAM初始化程序和读写函数:
void My_SRAM_Init(void)
{
FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure;
FSMC_NORSRAMTimingInitTypeDef p;
GPIO_InitTypeDef GPIO_InitStructure;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOG | RCC_APB2Periph_GPIOE |
RCC_APB2Periph_GPIOF, ENABLE);
/*-- GPIO 设置 ------------------------------------------------------*/
/*!< 数据线配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_8 | GPIO_Pin_9 |
GPIO_Pin_10 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 |
GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 |
GPIO_Pin_15;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/*!< 地址线配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 |
GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_12 | GPIO_Pin_13 |
GPIO_Pin_14 | GPIO_Pin_15;
GPIO_Init(GPIOF, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 |
GPIO_Pin_4 | GPIO_Pin_5;
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/*!< NOE 和 NWE 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/*!< NE3 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOG, &GPIO_InitStructure);
/*!< NBL0, NBL1 配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/*-- FSMC 设置 ------------------------------------------------------*/
p.FSMC_AddressSetupTime = 0; //地址建立时间SRAM读写比LCD块,我的LCD这里是2
p.FSMC_AddressHoldTime = 0; //地址保持时间
p.FSMC_DataSetupTime = 3; //数据建立时间
p.FSMC_BusTurnAroundDuration = 0;
p.FSMC_CLKDivision = 0;
p.FSMC_DataLatency = 0;
p.FSMC_AccessMode = FSMC_AccessMode_A;
FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM3; //选择Bank
FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable;//FSMC_DataAddressMux_Disable;
FSMC_NORSRAMInitStructure.FSMC_MemoryType = FSMC_MemoryType_SRAM;
FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;
FSMC_NORSRAMInitStructure.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &p;
FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &p;
FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure);
/*!< 使能该bank Enable FSMC Bank1_SRAM Bank */
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM3, ENABLE);
}
将缓存数据写入SRAM
void My_SRAM_WriteBuffer(uint16_t* pBuffer, uint32_t WriteAddr, uint32_t NumHalfwordToWrite)
{
for(; NumHalfwordToWrite != 0; NumHalfwordToWrite--) /*!< while there is data to write */
{
/*!< Transfer data to the memory */
*(uint16_t *) (Bank1_SRAM3_ADDR + WriteAddr) = *pBuffer++;
/*!< Increment the address*/
WriteAddr += 2;
}
}
读出SRAM中的数据到SRAM
void My_SRAM_ReadBuffer(uint16_t* pBuffer, uint32_t ReadAddr, uint32_t NumHalfwordToRead)
{
for(; NumHalfwordToRead != 0; NumHalfwordToRead--) /*!< while there is data to read */
{
/*!< Read a half-word from the memory */
*pBuffer++ = *(__IO uint16_t*) (Bank1_SRAM3_ADDR + ReadAddr);
/*!< Increment the address*/
ReadAddr += 2;
}
}
填充缓冲:
void Fill_Buffer(uint16_t *pBuffer, uint16_t BufferLenght, uint32_t Offset)
{
uint16_t IndexTmp = 0;
/* Put in global buffer same values */
for (IndexTmp = 0; IndexTmp < BufferLenght; IndexTmp++ )
{
pBuffer[IndexTmp] = IndexTmp + Offset;
}
}
主函数中调用:
for(i=0;i<BUFFER_SIZE;i++) //显示RxBuffer内容,以便对比
{
printf("%X\t",RdBuffer[i]);
}
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC, ENABLE); //前次忘记FSMC开时钟了,所以读不出来
My_SRAM_Init(); //初始化FSMC SRAM
Fill_Buffer(WrBuffer, BUFFER_SIZE, 0); //向写入数据的缓冲中写内容
My_SRAM_WriteBuffer(WrBuffer, WRITE_READ_ADDR, BUFFER_SIZE); //将缓冲中的内容写入SRAM
My_SRAM_ReadBuffer(RdBuffer, WRITE_READ_ADDR, BUFFER_SIZE); //读出
for(i=0;i<BUFFER_SIZE;i++) //显示内容
{
printf("%X\t",RdBuffer[i]);
}
最后 上图:
读SD卡数据到SRAM中,将SRAM当作个缓冲也不错哦。
146楼
DAC 看起来挺麻烦的,用起来还是很简单的。
只要设置几个东西就能输出。或许是我使用了软件触发的缘故吧.DMA DAC定时器我都没用到
片子上的DAC可以用来产生几种波形,或者直接输出给定的值。
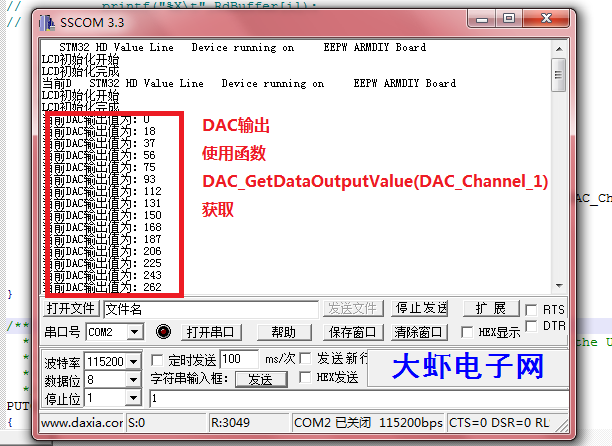
今天分别测试下DAC输出噪声波形、三角波和DR中的数值。使用软件触发模式
没有示波器,用三用表测。
测量方法是这样的:在每次触发之后设置断点,让程序停在那里。然后三用表测。
DAC初始化代码如下:
//初始化
void My_DAC_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);
//GPIO设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //必须是模拟输出模式
GPIO_Init(GPIOA, &GPIO_InitStructure);
//DAC初始化
DAC_InitStructure.DAC_Trigger = DAC_Trigger_Software; //软件触发
//DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_Noise; //产生噪音波形。对于DAC_CR的Bit[6:7]
//DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_Triangle; //三角波
DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_None; //不使用波形输出功能(输出DAC_DR中定义的值)
DAC_InitStructure.DAC_LFSRUnmask_TriangleAmplitude = DAC_LFSRUnmask_Bits8_0;
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Enable;
DAC_Init(DAC_Channel_1, &DAC_InitStructure);
DAC_Cmd(DAC_Channel_1, ENABLE);
DAC_SetChannel1Data(DAC_Align_12b_L, 0x0000);
}
产生波形输出时,在主函数中调用:
My_DAC_Init();
while(1)
{
DAC_SoftwareTriggerCmd(DAC_Channel_1, ENABLE);
//delay_ms(1000);
}
产生指定值输出时候的调用:
while(1)
{
for(i = 0;i<100;i++)
{
DAC_SetChannel1Data(DAC_Align_12b_L, i*300);
DAC_SoftwareTriggerCmd(DAC_Channel_1, ENABLE);
printf("当前DAC输出值为:%d\t\r\n",DAC_GetDataOutputValue(DAC_Channel_1)); //串口打印当前DAC输出的值
}
//delay_ms(1000);
}
两只手,一手一个三用表表笔,没第三只手照相了。。。
等回去用示波器补图。
做了个串口输出的图供欣赏:
DAC的几个触发模式,先了解一下。
#define DAC_Trigger_None ((uint32_t)0x00000000) /*!< 只要数据准备完成就输出 */
#define DAC_Trigger_T6_TRGO ((uint32_t)0x00000004) /*!< TIM6 触发 */
#define DAC_Trigger_T8_TRGO ((uint32_t)0x0000000C) /*!< TIM8 触发*/
#define DAC_Trigger_T3_TRGO ((uint32_t)0x0000000C) /*!< TIM8 触发 */
#define DAC_Trigger_T7_TRGO ((uint32_t)0x00000014) /*!< TIM7 触发 */
#define DAC_Trigger_T5_TRGO ((uint32_t)0x0000001C) /*!< TIM5 触发 */
#define DAC_Trigger_T15_TRGO ((uint32_t)0x0000001C) /*!< TIM15 触发*/
#define DAC_Trigger_T2_TRGO ((uint32_t)0x00000024) /*!< TIM2 */
#define DAC_Trigger_T4_TRGO ((uint32_t)0x0000002C) /*!< TIM4 */
#define DAC_Trigger_Ext_IT9 ((uint32_t)0x00000034) /*!< 外部中断线9 触发 */
#define DAC_Trigger_Software ((uint32_t)0x0000003C) /*!< 软件触发 */
147楼
SPI初始化和数据传输
LCD的触摸功能是SPI控制的,为了适应LCD的触摸功能,得先搞下SPI。
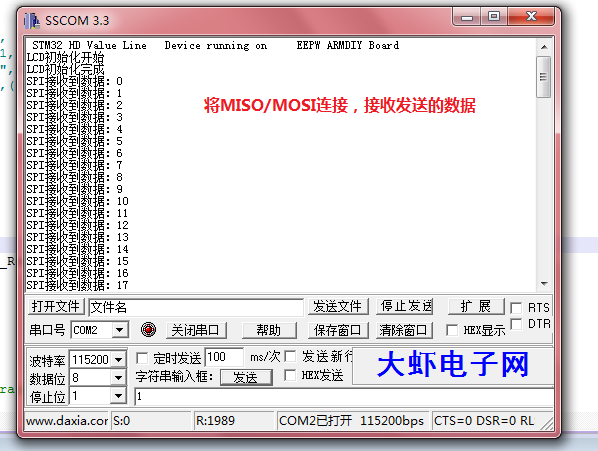
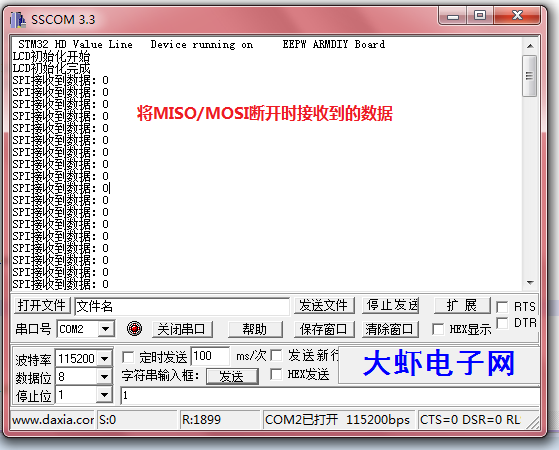
SPI总线在发送数据的时候,同时也在接收数据。因此将SPI总线的MISO和MOSI两个线连接起来就能看到发送出去的数据。
SPI1对应的GPIO引脚为PA5->SPI1_CLK PA6->SPI1_MISO PA7->SPI1_MOSI。在板子上分别是SW2、SW3、SW4。因此将SW3、SW4插针链接。SCK不用管。
俺使用了库函数来玩SPI,代码如下:
//SPI初始化
void SPI1_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_SPI1, ENABLE );
/* Configure SPI1 pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7; //分别对应SPI1_CLK、SPI1_MISO、SPI1_MOSI
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* SPI1 configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态:时钟悬空高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}
//发送/接收数据
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 retry=0;
//while((SPI1->SR&1<<1)==0)//等待发送区空
/* Loop while DR register in not emplty */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)return 0;
}
/* Send byte through the SPI1 peripheral */
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据
retry=0;
/* Wait to receive a byte */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
/* Return the byte read from the SPI bus */
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
主函数中调用:
SPI1_Init();
for(i=0;i<100;i++)
{
printf("SPI接收到数据:%d\r\n",SPI1_ReadWriteByte(i));
}
串口显示图片如下:
LCD的触摸功能是SPI控制的,为了适应LCD的触摸功能,得先搞下SPI。
SPI总线在发送数据的时候,同时也在接收数据。因此将SPI总线的MISO和MOSI两个线连接起来就能看到发送出去的数据。
SPI1对应的GPIO引脚为PA5->SPI1_CLK PA6->SPI1_MISO PA7->SPI1_MOSI。在板子上分别是SW2、SW3、SW4。因此将SW3、SW4插针链接。SCK不用管。
俺使用了库函数来玩SPI,代码如下:
//SPI初始化
void SPI1_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_SPI1, ENABLE );
/* Configure SPI1 pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7; //分别对应SPI1_CLK、SPI1_MISO、SPI1_MOSI
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* SPI1 configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态:时钟悬空高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}
//发送/接收数据
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 retry=0;
//while((SPI1->SR&1<<1)==0)//等待发送区空
/* Loop while DR register in not emplty */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)return 0;
}
/* Send byte through the SPI1 peripheral */
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据
retry=0;
/* Wait to receive a byte */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); //检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
/* Return the byte read from the SPI bus */
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
主函数中调用:
SPI1_Init();
for(i=0;i<100;i++)
{
printf("SPI接收到数据:%d\r\n",SPI1_ReadWriteByte(i));
}
串口显示图片如下:
回复
| 有奖活动 | |
|---|---|
| 2026年“我要开发板活动”第三季,开始了! | |
| 硬核工程师专属补给计划——填盲盒 | |
| “我踩过的那些坑”主题活动——第002期 | |
| 【EEPW电子工程师创研计划】技术变现通道已开启~ | |
| 发原创文章 【每月瓜分千元赏金 凭实力攒钱买好礼~】 | |
| 【EEPW在线】E起听工程师的声音! | |
| 高校联络员开始招募啦!有惊喜!! | |
| 【工程师专属福利】每天30秒,积分轻松拿!EEPW宠粉打卡计划启动! | |
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| PTC与NTC功能常规对比被打赏¥14元 | |
| 【分享开发笔记,赚取电动螺丝刀】关于3pin锂电池接口的介绍/使用被打赏¥16元 | |
| 以启明云端ESP32P4开发板实现TF卡读写功能被打赏¥28元 | |
| 【分享开发笔记,赚取电动螺丝刀】树莓派5串口UART0配置被打赏¥25元 | |
| 【STM32F103ZET6】17:分享在Rtos项目中断管理的使用经验被打赏¥23元 | |
| 【STM32F103ZET6】16:分享在中断中恢复串口任务,遇到的问题被打赏¥31元 | |
| 在FireBeetle2ESP32-C5上实现温度大气压检测及显示被打赏¥21元 | |
| 【分享开发笔记,赚取电动螺丝刀】SAME51双串口收发配置被打赏¥27元 | |
| Chaos-nano操作系统在手持式VOC检测设备上的应用被打赏¥37元 | |
| 【分享开发笔记,赚取电动螺丝刀】关于在导入第三方库lib时,wchart类型冲突的原因及解决方案被打赏¥30元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

