把SST25VF016的驱动完善了一下
头文件 flash.h
#ifndef WW_25VF06
#define WW_25VF06
// flash.h
// ww 25VF016 v1.0 提供了简化的驱动版本
// 后继应该继续添加写入flash之前的读取判断是否被擦除的工作 以及4k 32k 64k的分块
// 适用于SSTVF25016
#include "CG_macrodriver.h"
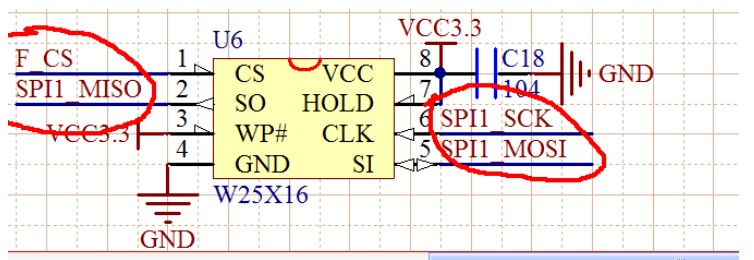
// 定义CS口
#define FLASH_CS P0_bit.no0
// 定义MCU输入端口 SI
#define FLASH_SI P1_bit.no1
#define FLASH_ID 0XBF41
//指令表
#define T25VF_WriteEnable 0x06
#define T25VF_WriteDisable 0x04
#define T25VF_ReadStatusReg 0x05
#define T25VF_WriteStatusReg 0x01
#define T25VF_WriteStatusRegEnable 0x50;
#define T25VF_ReadData 0x03
#define T25VF_FastReadData 0x0B
#define T25VF_ByteProgram 0x02
#define T25VF_BlockErase32k 0x52
#define T25VF_BlockErase64k 0xD8
#define T25VF_SectorErase4k 0x20
#define T25VF_ChipErase 0xC7
//#define T25VF_DeviceID 0xAB
//#define T25VF_ManufactDeviceID 0xAB
#define T25VF_ReadID 0x90
#define T25VF_JedecDeviceID 0x9F
#define T25VF_Enable_Output_BY 0x70
#define T25VF_Disable_Output_BY 0x80
#define T25VF_AAI_WordProgram 0xAD
UINT SPI_Flash_ReadID(void); //读取FLASH ID
// 分成两部分 读取FLASH ID
UCHAR SPI_Flash_ReadFactoryID(void); //读取厂商ID
UCHAR SPI_Flash_ReadDeviceID(void); //读取 设备ID
ULONG SPI_Flash_ReadJedecID(void); // 读取Jedec ID
UCHAR SPI_Flash_ReadSR(void); //读取状态寄存器
void SPI_Flash_Wait_Busy(void); //等待空闲
void SPI_FLASH_Write_SR(UCHAR sr); //写状态寄存器
void SPI_FLASH_Write_Enable(void); //写使能
void SPI_FLASH_Write_Disable(void); //写保护
void SPI_FLASH_Write_SR_Enable(void); // 使使能改写状态寄存器操作void SPI_Flash_Erase_Chip(void); //整片擦除
void SPI_Flash_Erase_Sector4k(ULONG Dst_Addr_Index);//扇区擦除
void SPI_Flash_Erase_Block_32k(ULONG Dst_Addr_Index);//block32k
void SPI_Flash_Erase_Block_64k(ULONG Dst_Addr_Index);//block64k
//检测是否可以执行写入操作
void SPI_Flash_Write_Enable_Check(void);
//读取flash单个字节
UCHAR SPI_Flash_Read(ULONG ReadAddr);
//连续读取flash
void SPI_Flash_Read_Continue(UCHAR* pBuffer,ULONG ReadAddr,UINT NumByteToRead);
//高速读取flash单个字节
UCHAR SPI_Flash_HighRead(ULONG ReadAddr);
//连高速续读取flash
void SPI_Flash_HighRead_Continue(UCHAR* pBuffer,ULONG ReadAddr,UINT NumByteToRead);
// 写入flash
void SPI_Flash_ByteWrite(UCHAR Data ,ULONG WriteAddr);
// 第一次调用AAI 记得之前写使能
void SPI_Flash_AAI_WordProgramA(UCHAR *Data, ULONG WriteAddr);
// 第二次调用AAI 之前不必写使能
void SPI_Flash_AAI_WordProgramB(UCHAR *Data);
// 整体的AAI 操作 // 需要停止AAI 时候 检测到芯片不忙 发送写禁止命令即可
void SPI_Flash_AAI_WordProgram(UCHAR *Data, UINT NumByteToWrite, ULONG WriteAddr);
// 在AAI模式下监测MISO线是否变为1,用以显示AAI操作模式完成
void SPI_Flash_Poll_SO() ;
// 整体的AAI 操作 使用SO判断忙标志
void SPI_Flash_AAI_WordProgramSO(UCHAR *Data, UINT NumByteToWrite, ULONG WriteAddr);
// 允许MISO在AAI模式期间输出RY/BY# 状态
void SPI_Flash_Enable_Output_BY();
// 功能: 禁止MISO在AAI模式下作为输出RY/BY#状态的信号*/
void SPI_Flash_Disable_Output_BY();
#endif
主函数main.c 测试
*/
void main(void)
{
/* Start user code. Do not edit comment generated here */
// 初始化 接收和发送缓冲
InitComTxBuff();
InitComRxBuff();
// 验证SPI操作
/* Start CSI00 operations */
CSI00_Start();
// 测试读取ID
// ID = SPI_Flash_ReadID();
// FactoryID = SPI_Flash_ReadFactoryID();
// DeviceID = SPI_Flash_ReadDeviceID();
// 测试读取Jedec ID
// Jedec_ID = SPI_Flash_ReadJedecID();
// 测试读取状态寄存器
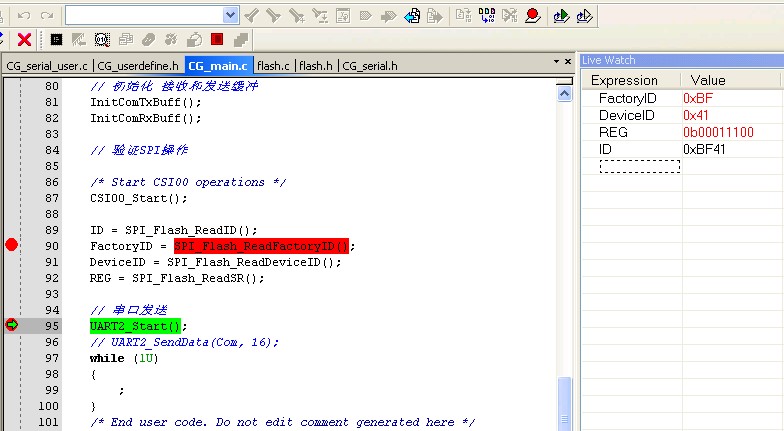
// 芯片上电读取出来的状态寄存器上电初始化为 0b00011100 全部芯片受保护
REG = SPI_Flash_ReadSR();
// 测试写入寄存器保护位
// 首先使能写寄存器
REG &= 0;
SPI_FLASH_Write_SR(REG); //写状态寄存器
REG = SPI_Flash_ReadSR();
// 测试擦除32k 索引1
// SPI_Flash_Erase_Block_32k(1);
// 测试擦除64k 索引2
// SPI_Flash_Erase_Block_64k(2);
// 测试整片擦除
// SPI_Flash_Erase_Chip();
// 测试擦除4k 索引0
// SPI_Flash_Erase_Sector4k(0);
// 测试写入操作
intTestWriteData();
// 单个字节的写入
/*
SPI_Flash_ByteWrite(testWriteData[0], 0x00);//写入flash
SPI_Flash_ByteWrite(testWriteData[1], 0x01);//写入flash
SPI_Flash_ByteWrite(testWriteData[2], 0x02);//写入flash
SPI_Flash_ByteWrite(testWriteData[3], 0x03);//写入flash
SPI_Flash_ByteWrite(testWriteData[4], 0x04);//写入flash
SPI_Flash_ByteWrite(testWriteData[5], 0x05);//写入flash
*/
// 测试读取单个字节
/*
testReadData[0] = SPI_Flash_Read(0x00);
testReadData[1] = SPI_Flash_Read(0x01);
testReadData[2] = SPI_Flash_Read(0x02);
testReadData[3] = SPI_Flash_Read(0x03);
testReadData[4] = SPI_Flash_Read(0x04);
testReadData[5] = SPI_Flash_Read(0x05);
*/
// 多个字节写入 方式1
/*
SPI_Flash_Erase_Sector4k(0);
SPI_Flash_AAI_WordProgram(testWriteData, 32, 0x00);
testReadData[6] = SPI_Flash_HighRead(0x06);
testReadData[7] = SPI_Flash_HighRead(0x07);
testReadData[8] = SPI_Flash_HighRead(0x08);
testReadData[9] = SPI_Flash_HighRead(0x09);
testReadData[10] = SPI_Flash_HighRead(0x10);
testReadData[11] = SPI_Flash_HighRead(0x11);
*/
// 多个字节写入 方式2
SPI_Flash_Erase_Sector4k(0);
SPI_Flash_AAI_WordProgramSO(testWriteData, 32, 0x00);
// 测试读取多个字节
SPI_Flash_Read_Continue(testReadData,0,16);
// 第二次从第16个字节地址开始读
SPI_Flash_HighRead_Continue(testReadData+16,16,16);
// 串口发送
UART2_Start();
// UART2_SendData(Com, 16);
while (1U)
{
;
}
/* End user code. Do not edit comment generated here */
}
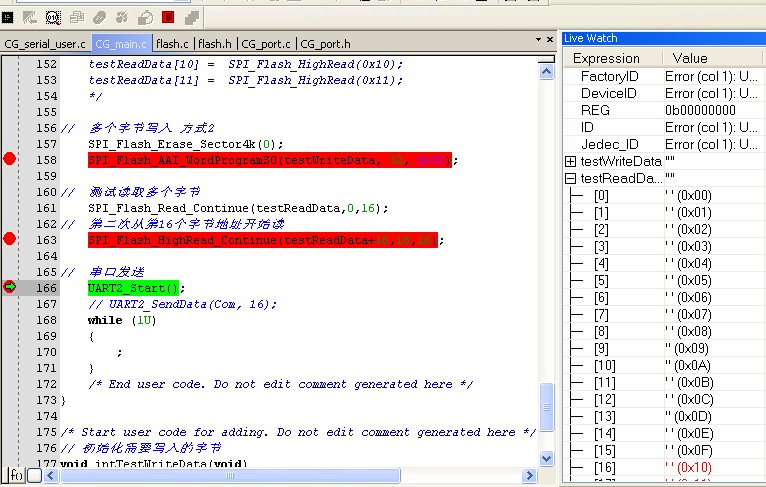
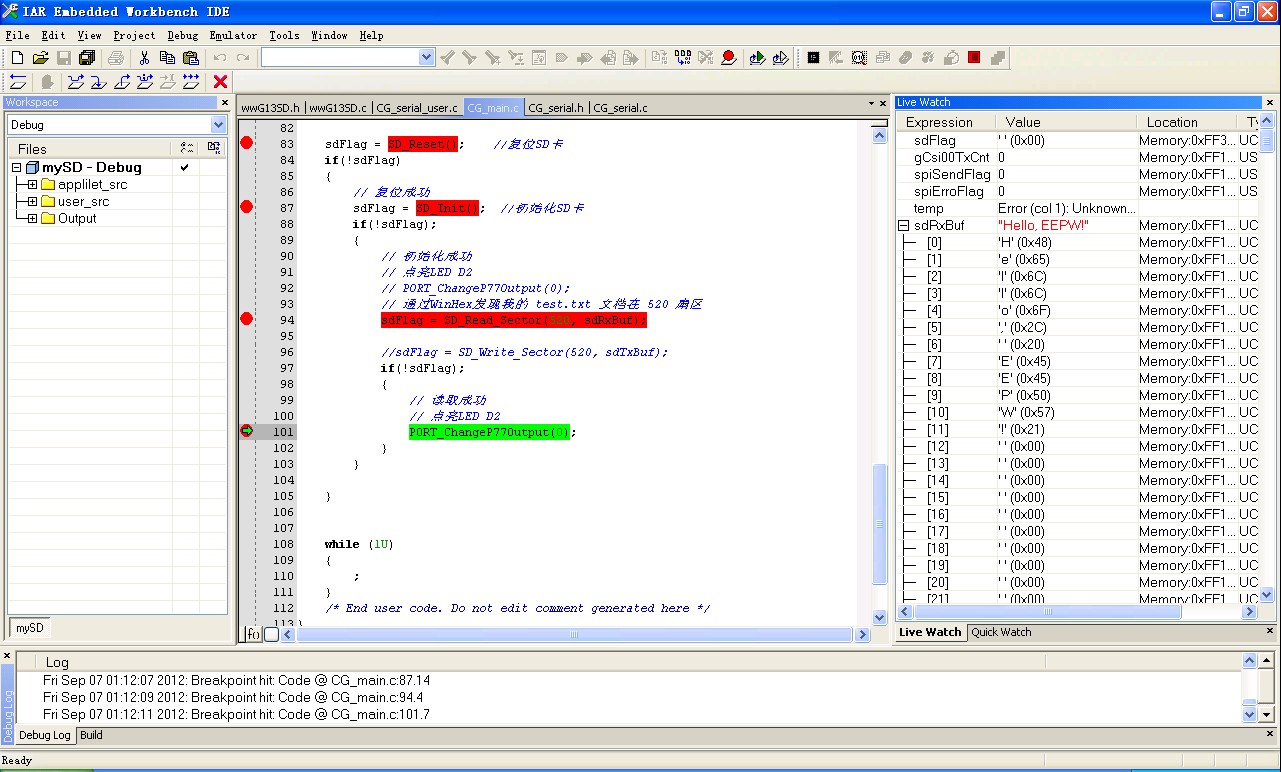
需要注意的是 芯片第一次上电读取出来的状态寄存器上电初始化为 0b00011100 即全部芯片受保护 因此为了能够写入芯片 必须修改状态寄存器中的写保护位
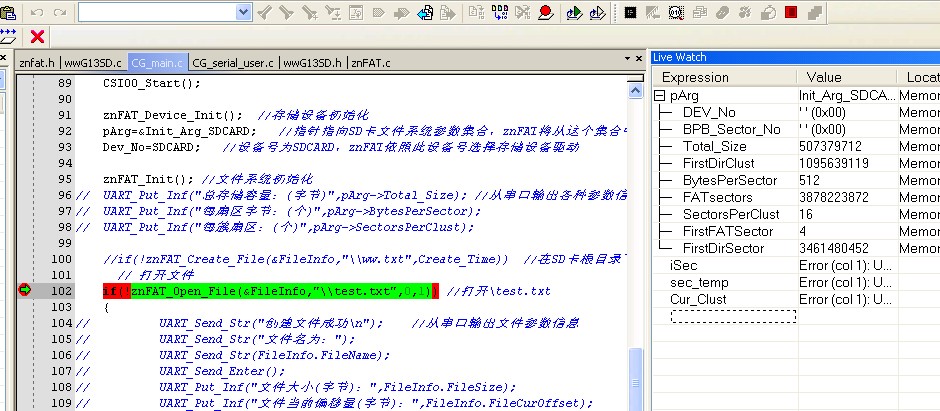
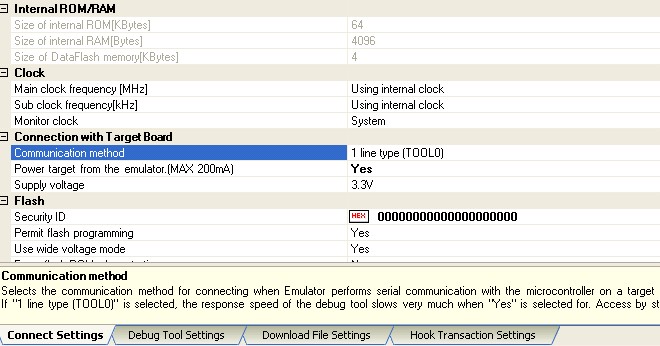
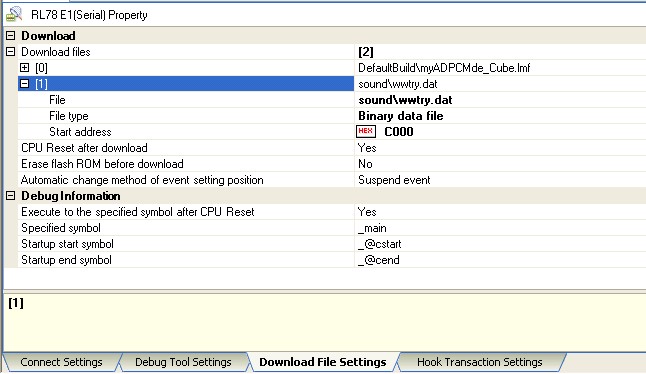
调试截图
目前基本上还剩下下面几个内容
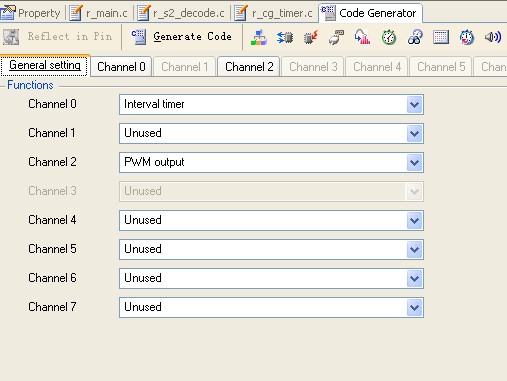
PWM模块实现H桥直流马达驱动
ADPCM库
DMA
还有个问题 定时器输入捕获,输出比较是什么意思?













 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

