
仔细看看教程里1602的指令,按斑竹的提示,移动这2行并不算太难。
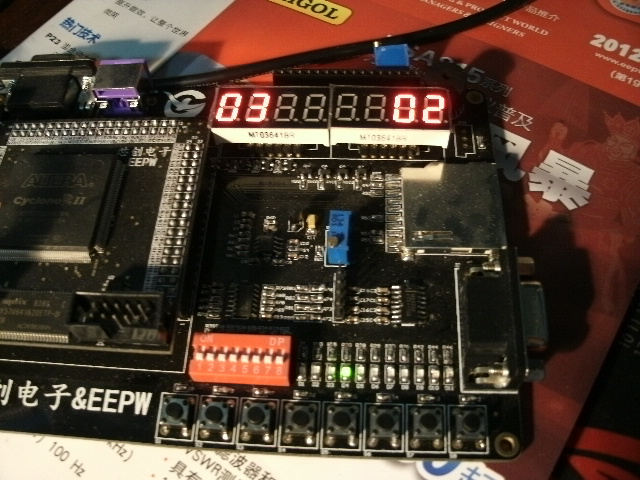
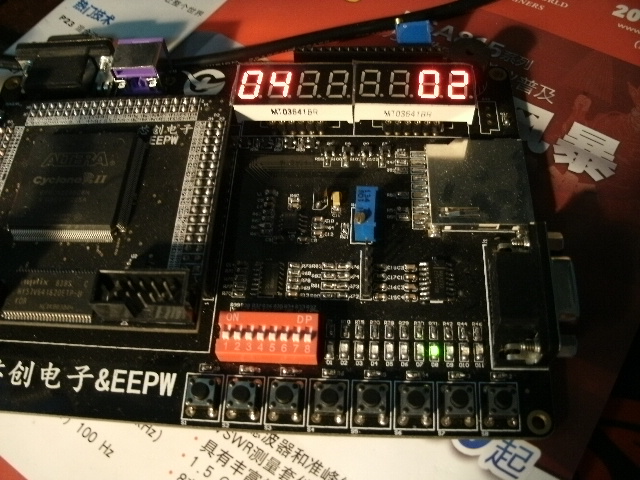
细细地看着代码里的“状态机”部分,还没摸出太多的状态机的门道,倒是觉得代码里对1602的初始化过于频繁,因为用过1602 ,觉得初始化1次就够了。于是下手对有关初始部分作了小小的改动,改后居然也可以正常显示,而且移动还显得轻快了一点。
改动的部分截图如下:
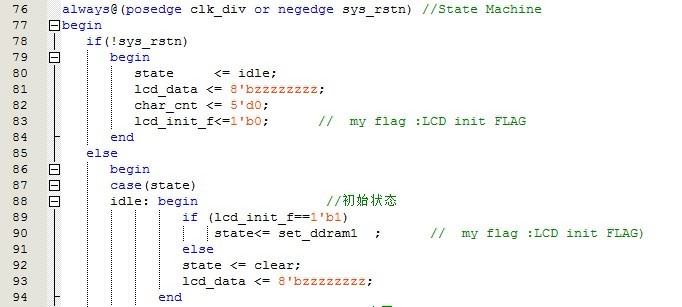
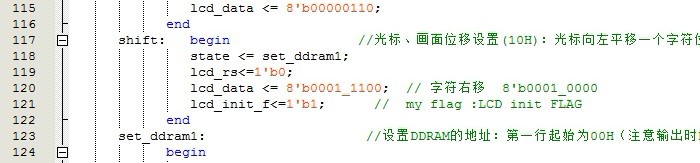
(定义个标志(lcd_init_f),LCD初始化后该标志置位,初始化前判别下该标志位。)
(12-09) 再次对原状态机代码分析,原来的代码是合适的,之前对之有“误读”;
【视频】








 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

