
作者:闽江学院 江思岚 朱圈俊 刘卓
指导教师:张小进
作品简介
开发背景:
移动机器人是机器人学的一个重要分支,对于移动机器人的研究,包括轮式、腿式、履带式以及水下式机器人等,可以追溯到20世纪60年代。移动机器人得到快速发展有两方面原因:一是其应用范围越来越广泛;二是相关领域如计算、传感、控制及执行等技术的快速发展。移动机器人尚有不少技术问题有待解决,因此近几年对移动机器人的研究相当活跃。
近年来,随着移动机器人研究不断深入、应用领域更加广泛,所面临的环境和任务也越来越复杂。机器人经常会遇到一些比较狭窄,而且有很多大转角的工作场合,如何在这样比较复杂的环境中灵活快捷的执行任务,成为人们颇为关心的一个问题。双轮自平衡机器人概念就是在这样的背景下提出来的。两轮自平衡小车是一个高度不稳定两轮机器人,是一种多变量、非线性、强耦合的系统,是检验各种控制方法的典型装置。同时由于它具有体积小、运动灵活、零转弯半径等特点,将会在军用和民用领域有着广泛的应用前景。因为它既有理论研究意义又有实用价值,所以两轮自平衡小车的研究在最近十年引起了大量机器人技术实验室的广泛关注。
结构说明:
这个作品由软件部分和硬件部分组成。硬件部分包括车模设计、电机以及驱动、传感器(加速度传感器、陀螺仪等)、以及MCU核心处理模块;软件部分主要是对传感器数据的处理算法和电机驱动方法。
功能与使用说明:
本作品主要研究两轮小车的自平衡控制方法,探究平衡机器人的控制算法,以及设计技巧。
作品全景图:
平台选型说明
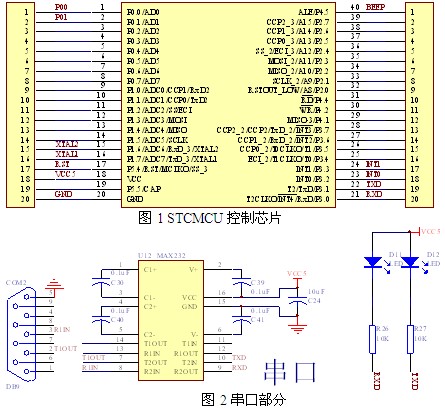
单片机(以STC15F2K61S2芯片为控制核心)
设计说明
本作品主要包括以下几个主要模块:
设计原理:
基本原理就是通过控制车轮运动保持车模的平衡。根据传感器的信息的不同调整电机的转动方向以及速度,进而控制车模的平衡。平衡控制示意图如下:

设计方案:
本参考方案假设维持车模直立、运行的动力都来自于车模的两个后车轮。后轮转动由两个直流电机驱动。因此从控制角度来看,车模作为一个控制对象,它的控制输入量是两个电极的转动速度。车模运动控制任务可以分解成以下三个基本控制任务:
(1) 控制车模平衡:通过控制两个电机正反向运动保持车模直立平衡状态;
(2) 控制车模速度:通过调节车模的倾角来实现车模速度控制,实际上最后还是演变成通过控制电机的转速来实现车轮速度的控制。
(3) 控制车模方向:通过控制两个电机之间的转动差速实现车模转向控制。
涉计主要部分:
1.传感器
加速度传感器ADXL345、角速度传感器-陀螺仪L3G4200D
2.传感器信号数据处理
卡尔曼滤波器、复合型互补滤波器
3.车模运动控制
PID调节器、电机、驱动39BYG260混合式步进电动机+LV8371
4.控制器 STC15F2K60S2IAP15F2K61S2
以下为各部分简述:
电机驱动
采用39BYG260混合式步进电动机,1-2相励磁(二相八拍运行),恒流载波驱动。步进电机驱动使用三洋的LV8371,PWM定电流控制步进电机驱动。
加速度传感器(ADXL345)
加速度传感器可以测量由地球引力作用或者物体运动所产生的加速度。车模直立时,固定加速度器在 Z 轴水平方向,此时输出信号为零电压信号。当车模发生倾斜时,重力加速度 g 便会在Z 轴方向形成加速度分量,从而引起该轴输出电压变化,可以得到车模的倾角。
角速度传感器-陀螺仪(L3G4200D)
陀螺仪可以用来测量物体的旋转角速度。当旋转器件时会改变振动频率从而反映出物体旋转的角速度。在车模上安装陀螺仪,可以测量车模倾斜角速度,将角速度信号进行积分便可以得到车模的倾角。
卡尔曼滤波器
卡尔曼滤波的目的和优点就是要尽可能的减少噪声的影响,并且从含有噪声的测量值中得到系统状态的最优估计。同时它采用递归计算,其状态的每一次更新估计都由前一次估计和新的输入数据计算得到,因此只需存储前一次估计,计算效率高。
复合互补型滤波器
根据陀螺仪和加速度计的工作特性,将二者的长处进行结合,融合两者的输出信号,补偿陀螺仪的漂移误差和加速度计的动态误差,得到一个更能准确反映车体倾角的数据,以便让微控制器更好的决策。
PID调节器
PID控制器就是将偏差的比例(Proportional)、积分(Integral)和微分(Differential)通过线性组合构成控制量,用这一控制量对被控对象进行控制。
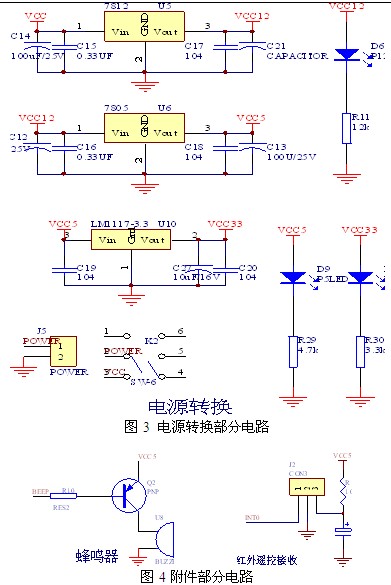
原理图:
作品特色
两轮自平衡小车是复杂的非线性系统,是验证各种控制算法的理想平台。作为轮式移动机器人一个重要分支,它具有体积小,运动灵活,适于在狭小和危险的环境下工作的特点,同时还可以作为一种运输和载人工具,有着重要的理论研究意义和广阔的应用前景。
系统演示视频:http://v.eepw.com.cn/video/play/id/2723
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

