14.实现变速小车
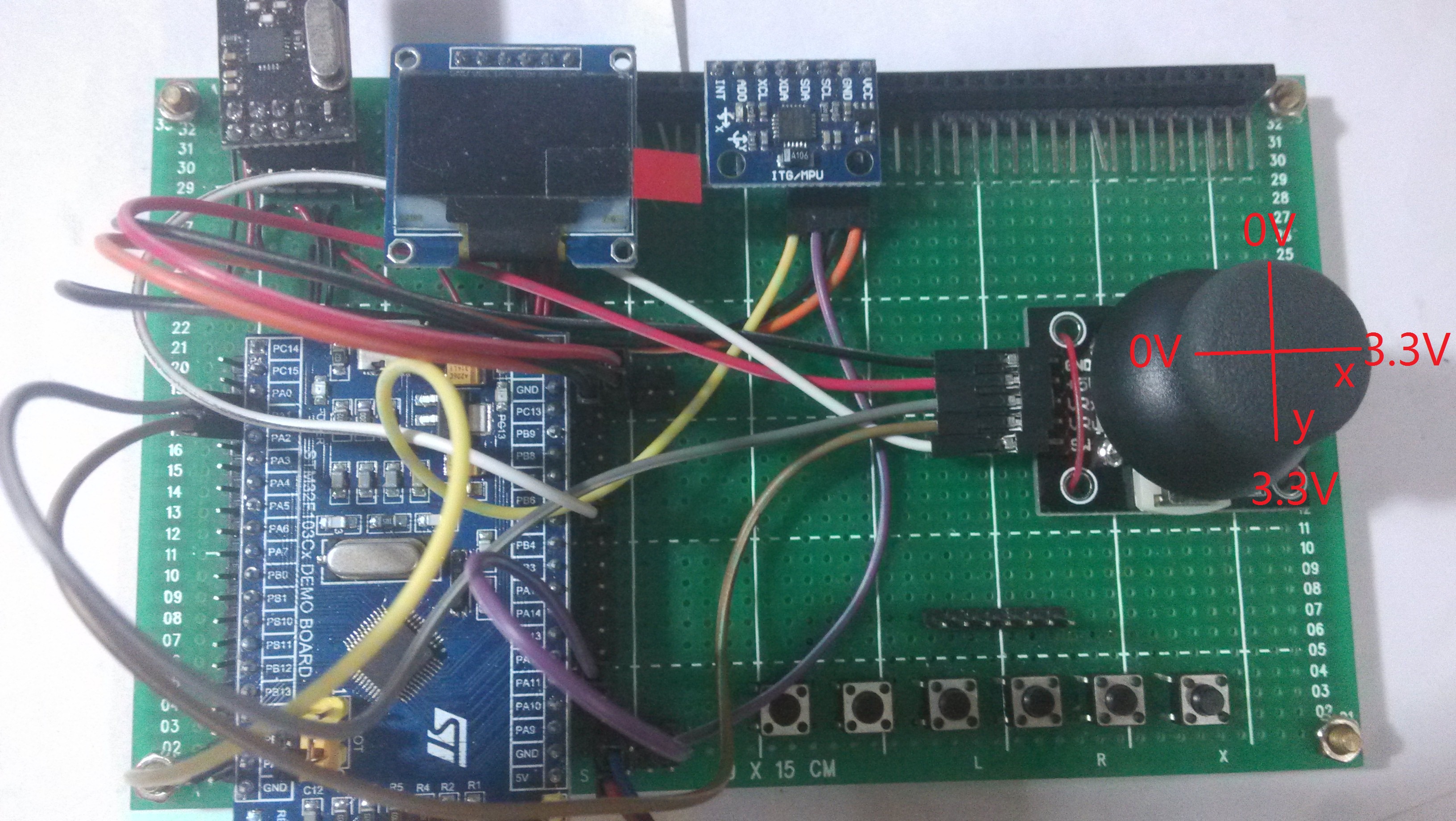
实验目的:按键控制小车速度,6个按键控制6档(6个速度),小车的移动用第12节的PS2遥杆控制,相关信息显示在OLED屏上。
先来看看源代码

小车的前进、后退速度有Movement控制,在注释中已经介绍很清楚了,数值越大,速度越快,反之相反,我们用变量Move代替。
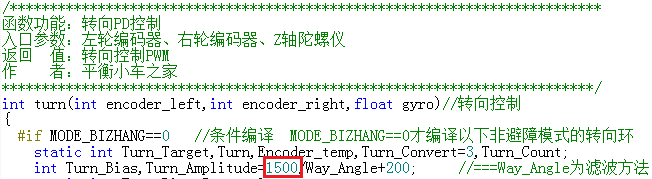
小车的左右转速度由红框中的数值决定,数值越大,速度越快,反之相反,我们用变量Move_Turn代替。
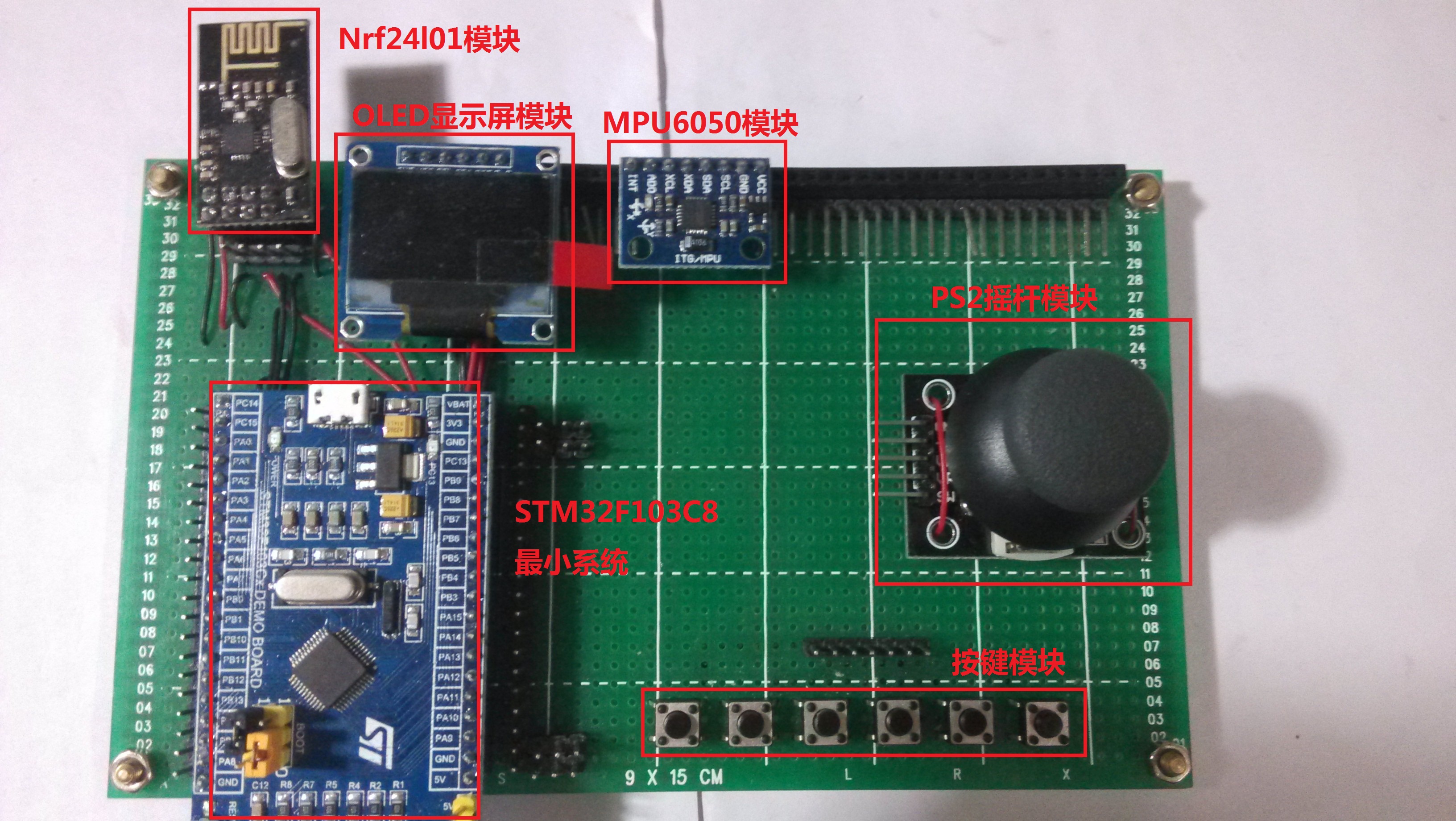
按键分布如下图

1档:Move值:150 Move_Turn值:300
2档:Move值:300 Move_Turn值:600
3档:Move值:450 Move_Turn值:900
4档:Move值:600 Move_Turn值:1200
5档:Move值:750 Move_Turn值:1500
6档:Move值:900 Move_Turn值:1800
主要代码修改
(1)修改按键程序key.c和key.h
void KEY_Init(void)
{
RCC->APB2ENR|=1<<3; //使能PORTB时钟
GPIOB->CRH&=0X0000FFFF;
GPIOB->CRH|=0X88880000;//PB12 PB13 PB15 PB15 上拉输入
GPIOB->CRL&=0XFF0FFF00;
GPIOB->CRL|=0X00800088;//PB0 PB1 PB5上拉输入
GPIOB->ODR|=0X0000F023; //PB0 PB1 PB5 PB12 PB13 PB15 PB15 上拉
}
void KEY_Scan (void)
{
if(s1==0)
{
delay_ms(10);
if(s1==0)
{
Move=15;
Move_Turn=30;
while(!s1);
}
}
if(s2==0)
{
delay_ms(10);
if(s2==0)
{
Move=30;
Move_Turn=60;
while(!s2);
}
}
if(s3==0)
{
delay_ms(10);
if(s3==0)
{
Move=45;
Move_Turn=90;
while(!s3);
}
}
if(s4==0)
{
delay_ms(10);
if(s4==0)
{
Move=60;
Move_Turn=120;
while(!s4);
}
}
if(s5==0)
{
delay_ms(10);
if(s5==0)
{
Move=75;
Move_Turn=150;
while(!s5);
}
}
if(s6==0)
{
delay_ms(10);
if(s6==0)
{
Move=90;
Move_Turn=180;
while(!s5);
}
}
}
(2)修改无线通讯程序24l01.c中的void NRF24L01()函数
void NRF24L01(void)
{
u8 mode=1,count;
u8 tmp_buf[33];
if(mode==0)//RX模式
{
RX_Mode();
while(1)
{
if(NRF24L01_RxPacket(tmp_buf)==0)//一旦接收到信息,则显示出来.
{
VRx=tmp_buf[1]*256+tmp_buf[2];
VRy=tmp_buf[3]*256+tmp_buf[4];
Flag_Stop=tmp_buf[5];
Move=tmp_buf[6]*10;
Move_Turn=tmp_buf[7]*10;
if(VRy<100)Flag_Qian=1,Flag_Hou=0,Flag_Left=0,Flag_Right=0;
else if(VRy>230)Flag_Qian=0,Flag_Hou=1,Flag_Left=0,Flag_Right=0;
else if(VRx<100)Flag_Qian=0,Flag_Hou=0,Flag_Left=1,Flag_Right=0;
else if(VRx>230)Flag_Qian=0,Flag_Hou=0,Flag_Left=0,Flag_Right=1;
else Flag_Qian=0,Flag_Hou=0,Flag_Left=0,Flag_Right=0;
}else break;
};
}else//TX模式
{
TX_Mode();
while(1)
{
if(++count>100)count=0;
tmp_buf[1]=VRx/256;
tmp_buf[2]=VRx%256;
tmp_buf[3]=VRy/256;
tmp_buf[4]=VRy%256;
tmp_buf[5]=Flag_Stop;
tmp_buf[6]=Move;
tmp_buf[7]=Move_Turn;
oled_show();
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
}else
break;
}
}
}
(3)修改显示程序show.c中oled_show()程序
void oled_show(void)
{
OLED_Display_On(); //显示屏打开
//=============显示VRx==================//
OLED_ShowString(00,00,"VRx");
OLED_ShowString(58,00,".");
OLED_ShowString(80,00,"V");
OLED_ShowNumber(45,00,VRx/100,2,12);
OLED_ShowNumber(68,00,VRx%100,2,12);
if(VRx%100<10) OLED_ShowNumber(62,00,0,2,12);
//=============显示VRy====================//
OLED_ShowString(00,12,"VRy");
OLED_ShowString(58,12,".");
OLED_ShowString(80,12,"V");
OLED_ShowNumber(45,12,VRy/100,2,12);
OLED_ShowNumber(68,12,VRy%100,2,12);
if(VRy%100<10) OLED_ShowNumber(62,12,0,2,12);
//=============显示Flag_Stop===============//
if(1==Flag_Stop) OLED_ShowString(00,24,"stop ");
else OLED_ShowString(00,24,"start");
//=============显示Move==================//
OLED_ShowString(00,36,"Move");
OLED_ShowNumber(80,36,Move*10,3,12);
//=============显示Move_Turn==============//
OLED_ShowString(00,48,"Move_Turn");
OLED_ShowNumber(80,48,Move_Turn*10,4,12);
//=============刷新=====================//
OLED_Refresh_Gram();
}
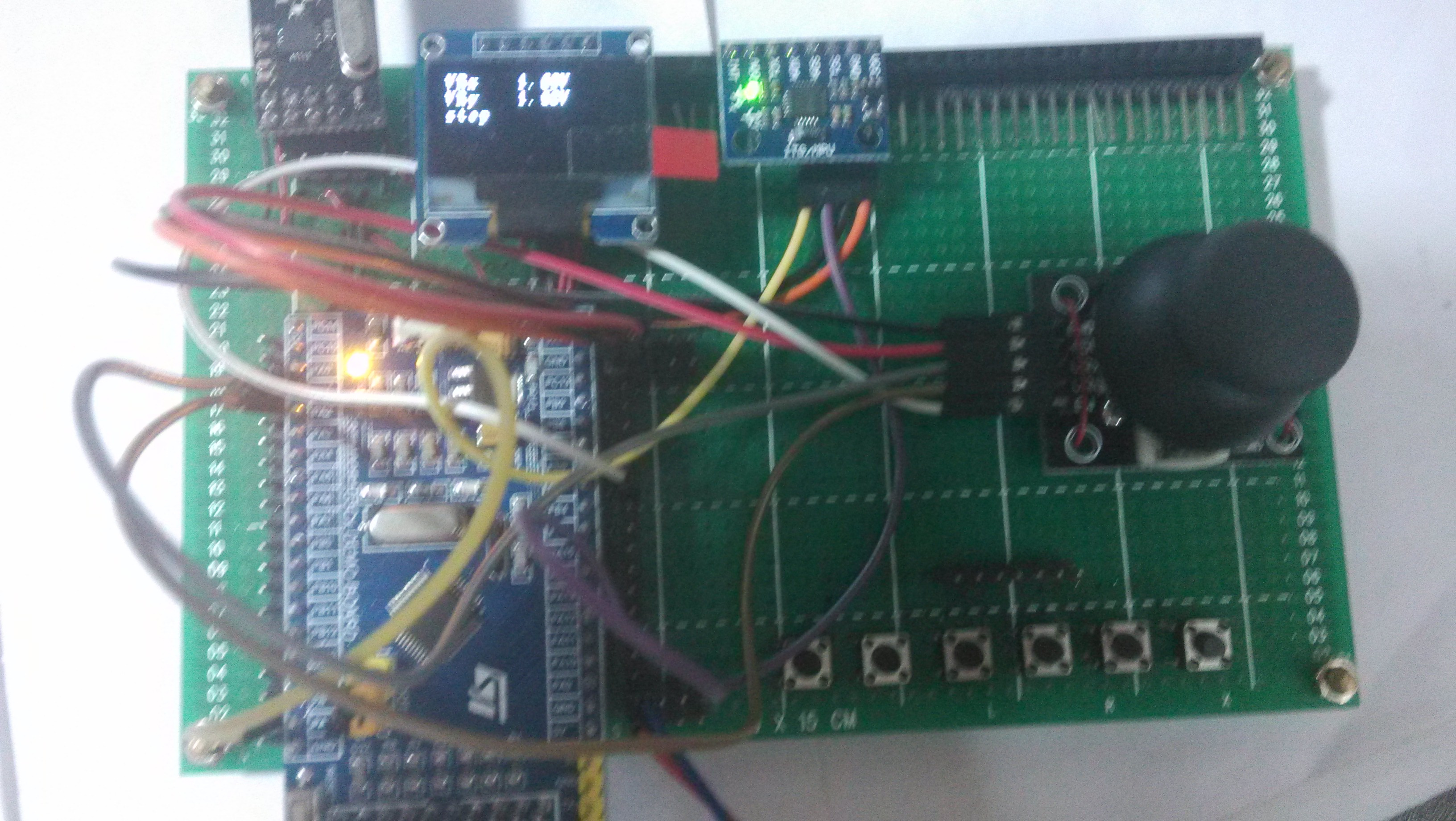
观察现象


原始状态,两路电压显示1.65V左右,小车状态stop,Move为150,Move_Turn为300。
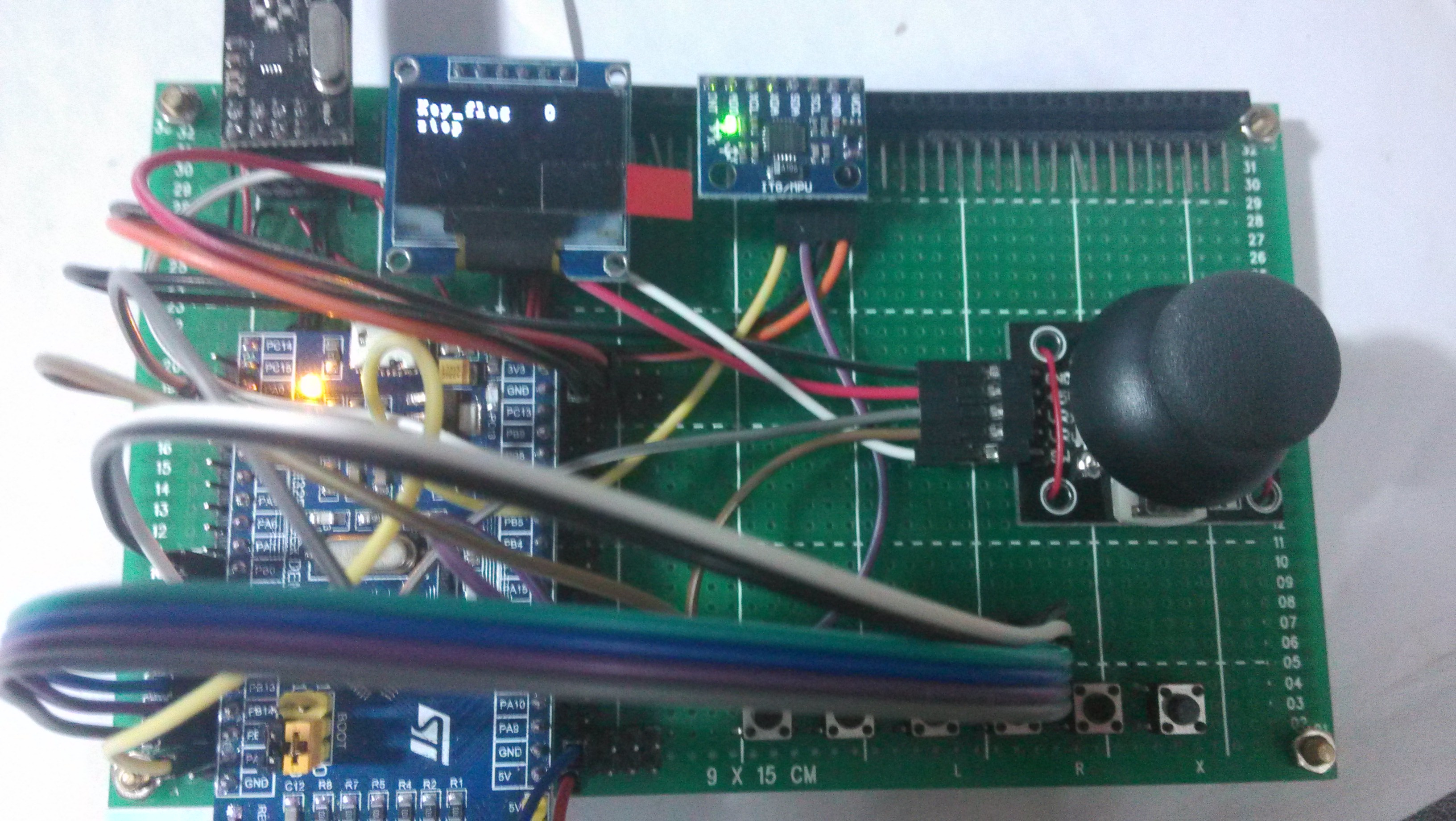
按键可以控制小车的速度,实现变速小车,OLED屏显示正常。















 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

