
 AMR传感器技术原理基于AMR原理的传感器的材料电阻率取决于相对于电流方向的磁化方向。AMR传感器是在磁饱和状态下工作,因此外加的磁场的主导了电阻变化。当外磁场和电流方向平行时,电阻最大;而当施加的电场垂直于载流磁感应合金的平面时,电阻最小。图1显示了AMR传感器工作原理的简化图。
AMR传感器技术原理基于AMR原理的传感器的材料电阻率取决于相对于电流方向的磁化方向。AMR传感器是在磁饱和状态下工作,因此外加的磁场的主导了电阻变化。当外磁场和电流方向平行时,电阻最大;而当施加的电场垂直于载流磁感应合金的平面时,电阻最小。图1显示了AMR传感器工作原理的简化图。 AMR传感器的选择为了确保电机转动的高精准度,在选择角度传感器时有以下建议 :
AMR传感器的选择为了确保电机转动的高精准度,在选择角度传感器时有以下建议 :能感应360° 旋转角,可以准确测量绝对角度位置(Absolute Angular Position);
角度误差率较低;
拥有线性稳定的误差率,方便让主微控制器(Microcontroller) 执行偏移校正的计算。
 角度传感器的安装针对大多数BLDC控制系统,根据可用空间大小和电机轴的可接近性,有许多方法来配置和安装传感器。以ADA4571作例,如图3所示是两个较普遍的安装配置。
角度传感器的安装针对大多数BLDC控制系统,根据可用空间大小和电机轴的可接近性,有许多方法来配置和安装传感器。以ADA4571作例,如图3所示是两个较普遍的安装配置。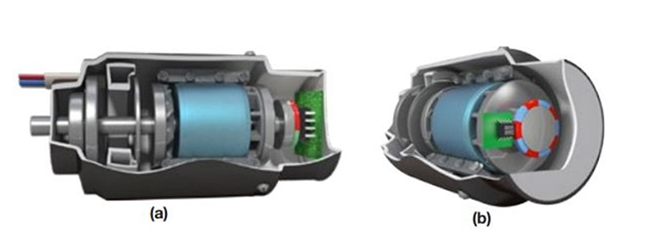 图3a是典型电机轴端系统,在旋转轴上安装了一个直径磁化盘式磁体,让磁体提供穿过传感器平面的磁场。在这种配置中,可直接读取转子角度,而没有机械和电气组件之间的接触。由于AMR技术不依赖于磁场强度 (Field Strength) ,因此它对于气隙变化(air-gap variation) 有较大容忍度,使得工程师在对材料的选择,以及对磁体物料的机械公差要求上,更为灵活。图3b是轴侧系统,此配置可用于那些待检测的轴不能在端头安装磁体的应用。在这种配置中,磁体提供磁场,传感器和磁化盘可以安装在轴上的任何位置,使得有空间限制的应用有多一种选择。总结对于工业和汽车BLDC电机控制系统的设计人员来说,磁感的角度传感器提供了一个小巧、坚固且易于组装的位置传感解决方案。在选择角度传感器时,需要注意以下三个要点:
图3a是典型电机轴端系统,在旋转轴上安装了一个直径磁化盘式磁体,让磁体提供穿过传感器平面的磁场。在这种配置中,可直接读取转子角度,而没有机械和电气组件之间的接触。由于AMR技术不依赖于磁场强度 (Field Strength) ,因此它对于气隙变化(air-gap variation) 有较大容忍度,使得工程师在对材料的选择,以及对磁体物料的机械公差要求上,更为灵活。图3b是轴侧系统,此配置可用于那些待检测的轴不能在端头安装磁体的应用。在这种配置中,磁体提供磁场,传感器和磁化盘可以安装在轴上的任何位置,使得有空间限制的应用有多一种选择。总结对于工业和汽车BLDC电机控制系统的设计人员来说,磁感的角度传感器提供了一个小巧、坚固且易于组装的位置传感解决方案。在选择角度传感器时,需要注意以下三个要点:能感应360° 旋转角,可以准确测量绝对角度位置(Absolute Angular Position);
角度误差率较低;
拥有线性稳定的误差率,以便主微控制器(Microcontroller) 执行偏移校正的计算。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

