
国内外网上开源的四轴不少
最近一直在考虑要移植一个玩玩
先研究一下差别,再选择一个移植吧
上午有点闲,也不想多看代码
看着微四轴,想加点什么模块
但是考虑到重量和空间,GPS啥的估计够呛啊
飞行器一侧只能添加些气压计之类的小模块了
焊接的时候,排针又是朝上的,到时候添加估计又有些小困难
突然看到了遥控器
个人看来的话,遥控器的耗电量其实相对比较小
加上手柄两侧还预留了相当大的原型区
想着飞四轴的时候,肉眼有时难以判断飞行器的姿势和朝向
嘿嘿,加个LCD来做个简单的显示吧
续航应该不会受到影响吧
LCD,果断首选Nokia 5110
倒腾一上午,打完收工。
上图
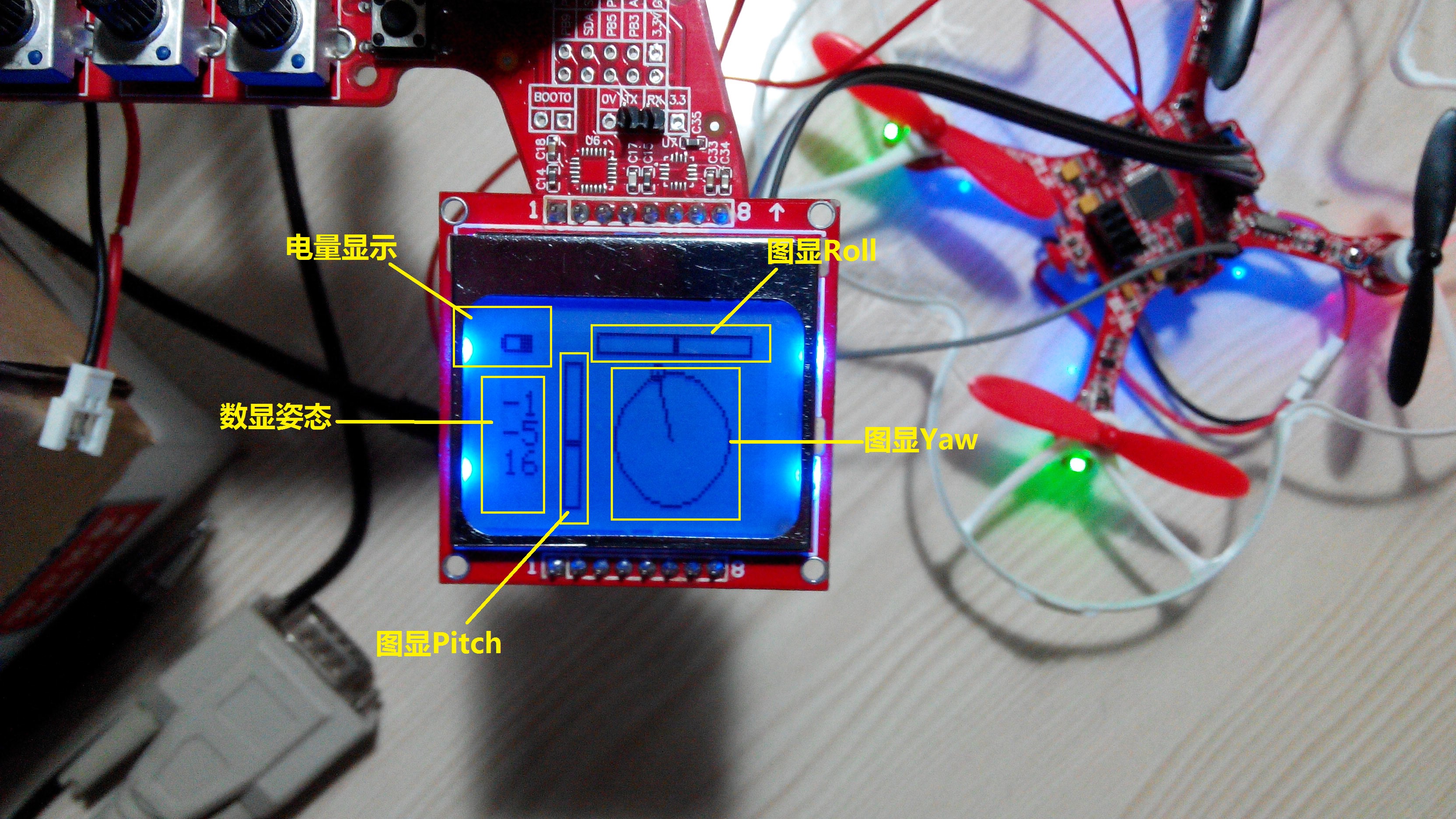
用到了一些5110的函数,作图啥的,蛮不错
上传分享一下,老规矩,回复下载
/*姿态的浮点数值取整*/ P = (int)Pitch; R = (int)Roll; Y = (int)Yaw; LcdClearAll(); //清屏 PutIcon((char*)(icon + com_temp),0,0);//输出电量显示,com_temp为电量比较值 /*画出pitch和roll图显*/ PutLine(20,8,25,8); PutLine(25,8,25,47); PutLine(20,8,20,47); PutLine(20,47,25,47); PutLine(30,0,78,0); PutLine(30,5,78,5); PutLine(30,5,30,0); PutLine(78,0,78,5); /*画出Yawl图显*/ PutCircle(54,28,18); PutLine(54-P/3,0,54-P/3,5); PutLine(55-P/3,0,55-P/3,5); PutLine(21,28-R/3,25,28-R/3); PutLine(21,29-R/3,25,29-R/3); PutCircle(54-18*sin(Yaw/60),28-18*cos(Yaw/60),2); PutLine(54,28,54-18*sin(Yaw/60),28-18*cos(Yaw/60)); /*数据格式转换,并送5110显示*/ sprintf(buffer_p,"%d",P); sprintf(buffer_r,"%d",R); sprintf(buffer_y,"%d",Y); PutStr(buffer_p,2,0); PutStr(buffer_r,3,0); PutStr(buffer_y,4,0); ClearAllBuf();//清除5110显示buff
还没把无线用上,慢慢折腾。
画得比较粗糙,有兴趣的筒子可以进一步改造一下
上视频,看效果:
视频传上来发现拖影比较严重
其实实际效果还可以的。
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

