
近期因为要弄这个姿态传感器的东西,用FPGA读取传感器信息,这是个I2c接口的传感器。
整理的资料:
http://forum.eepw.com.cn/thread/264865/1
竟然直接下载到一个可以直接用的。。。
先给大家贴出来看看吧:
verilog实现:
module top(
clk,
scl,
sda,
rst_n,
);
input clk,rst_n;
output scl;
output [7:0]data;
inout sda;
reg [2:0]cnt;//cnt=0,scl上升沿;cnt=1,scl高电平中间;cnt=2,scl下降沿;cnt=3,scl低电平中间
reg [8:0]cnt_sum;//产生IIC所需要的时钟
reg scl_r;//产生的时钟脉冲
reg [19:0]cnt_10ms;
always@(posedge clk or negedge rst_n)
if(!rst_n)
cnt_10ms <= 20'd0;
else
cnt_10ms <= cnt_10ms+1'b1;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt_sum <= 0;
else if(cnt_sum ==9'd499)
cnt_sum <= 0;
else
cnt_sum <= cnt_sum+1'b1;
end
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt <= 3'd5;
else
begin
case(cnt_sum)
9'd124: cnt<=3'd1;//高电平
9'd249: cnt<=3'd2;//下降沿
9'd374: cnt<=3'd3;//低电平
9'd499: cnt<=3'd0;//上升沿
default: cnt<=3'd5;
endcase
end
end
`define SCL_POS (cnt==3'd0)
`define SCL_HIG (cnt==3'd1)
`define SCL_NEG (cnt==3'd2)
`define SCL_LOW (cnt==3'd3)
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
scl_r <= 1'b0;
else if(cnt==3'd0)
scl_r <= 1'b1;
else if(cnt==3'd2)
scl_r <= 1'b0;
end
assign scl = scl_r;//scl时钟信号
`define DEVICE_READ 8'hD1//寻址器件,读操作
`define DEVICE_WRITE 8'hD0//寻址器件,写操作
`define ACC_XH 8'h3B//加速度x轴高位地址
`define ACC_XL 8'h3C//加速度x轴低位地址
`define ACC_YH 8'h3D//加速度y轴高位地址
`define ACC_YL 8'h3E//加速度y轴低位地址
`define ACC_ZH 8'h3F//加速度z轴高位地址
`define ACC_ZL 8'h40//加速度z轴低位地址
`define GYRO_XH 8'h43//陀螺仪x轴高位地址
`define GYRO_XL 8'h44//陀螺仪x轴低位地址
`define GYRO_YH 8'h45//陀螺仪y轴高位地址
`define GYRO_YL 8'h46//陀螺仪y轴低位地址
`define GYRO_ZH 8'h47//陀螺仪z轴高位地址
`define GYRO_ZL 8'h48//陀螺仪z轴低位地址
//陀螺仪初始化寄存器
`define PWR_MGMT_1 8'h6B
`define SMPLRT_DIV 8'h19
`define CONFIG1 8'h1A
`define GYRO_CONFIG 8'h1B
`define ACC_CONFIG 8'h1C
//陀螺仪初始化对应寄存器值配置
`define PWR_MGMT_1_VAL 8'h00
`define SMPLRT_DIV_VAL 8'h07
`define CONFIG1_VAL 8'h06
`define GYRO_CONFIG_VAL 8'h18
`define ACC_CONFIG_VAL 8'h01
parameter IDLE = 4'd0;
parameter START1 = 4'd1;
parameter ADD1 = 4'd2;
parameter ACK1 = 4'd3;
parameter ADD2 = 4'd4;
parameter ACK2 = 4'd5;
parameter START2 = 4'd6;
parameter ADD3 =4'd7;
parameter ACK3 = 4'd8;
parameter DATA = 4'd9;
parameter ACK4 = 4'd10;
parameter STOP1 = 4'd11;
parameter STOP2 = 4'd12;
parameter ADD_EXT = 4'd13;
parameter ACK_EXT = 4'd14;
reg [3:0]state;//状态寄存器
reg sda_r;//输出
reg sda_link;//sda_link=1,sda输出;sda_link=0,sda高阻态
reg [3:0]num;
reg [7:0]db_r;
reg [7:0]ACC_XH_READ;//存储加速度X轴高八位
reg [7:0]ACC_XL_READ;//存储加速度X轴低八位
reg [7:0]ACC_YH_READ;//存储加速度Y轴高八位
reg [7:0]ACC_YL_READ;//存储加速度Y轴低八位
reg [7:0]ACC_ZH_READ;//存储加速度Z轴高八位
reg [7:0]ACC_ZL_READ;//存储加速度Z轴低八位
reg [7:0]GYRO_XH_READ;//存储陀螺仪X轴高八位
reg [7:0]GYRO_XL_READ;//存储陀螺仪X轴低八位
reg [7:0]GYRO_YH_READ;//存储陀螺仪Y轴高八位
reg [7:0]GYRO_YL_READ;//存储陀螺仪Y轴低八位
reg [7:0]GYRO_ZH_READ;//存储陀螺仪Z轴高八位
reg [7:0]GYRO_ZL_READ;//存储陀螺仪Z轴低八位
reg [4:0]times;//记录已初始化配置的寄存器个数
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
state <= IDLE;
sda_r <= 1'b1;//拉高数据线
sda_link <= 1'b0;//高阻态
num <= 4'd0;
//初始化寄存器
ACC_XH_READ <= 8'h00;
ACC_XL_READ <= 8'h00;
ACC_YH_READ <= 8'h00;
ACC_YL_READ <= 8'h00;
ACC_ZH_READ <= 8'h00;
ACC_ZL_READ <= 8'h00;
GYRO_XH_READ <= 8'h00;
GYRO_XL_READ <= 8'h00;
GYRO_YH_READ <= 8'h00;
GYRO_YL_READ <= 8'h00;
GYRO_ZH_READ <= 8'h00;
GYRO_ZL_READ <= 8'h00;
times <= 5'b0;
end
else
case(state)
IDLE: begin
times <= times+1'b1;
sda_link <= 1'b1;//sda为输出
sda_r <= 1'b1;//拉高sda
db_r <= `DEVICE_WRITE;//向从机写入数据地址
state = START1;
end
START1:begin//IIC start
if(`SCL_HIG)//scl为高电平
begin
sda_link <= 1'b1;//sda输出
sda_r <= 1'b0;//拉低sda,产生start信号
state <= ADD1;
num <= 4'd0;
end
else
state <= START1;
end
ADD1: begin//数据写入
if(`SCL_LOW)//scl为低电平
begin
if(num == 4'd8)//当8位全部输出
begin
num <= 4'd0;//计数清零
sda_r <= 1'b1;
sda_link <= 1'b0;//sda高阻态
state <= ACK1;
end
else
begin
state <= ADD1;
num <= num+1'b1;
sda_r <= db_r[4'd7-num];//按位输出
end
end
else
state <= ADD1;
end
ACK1: begin//应答
if(`SCL_NEG)
begin
state <= ADD2;
case(times)//选择下一个写入寄存器地址
5'd1: db_r <= `PWR_MGMT_1;
5'd2: db_r <= `SMPLRT_DIV;
5'd3: db_r <= `CONFIG1;
5'd4: db_r <= `GYRO_CONFIG;
5'd5: db_r <= `ACC_CONFIG;
5'd6: db_r <= `ACC_XH;
5'd7: db_r <= `ACC_XL;
5'd8: db_r <= `ACC_YH;
5'd9: db_r <= `ACC_YL;
5'd10: db_r <= `ACC_ZH;
5'd11: db_r <= `ACC_ZL;
5'd12: db_r <= `GYRO_XH;
5'd13: db_r <= `GYRO_XL;
5'd14: db_r <= `GYRO_YH;
5'd15: db_r <= `GYRO_YL;
5'd16: db_r <= `GYRO_ZH;
5'd17: db_r <= `GYRO_ZL;
default: begin
db_r <= `PWR_MGMT_1;
times <= 5'd1;
end
endcase
end
else
state <= ACK1;//等待响应
end
ADD2: begin
if(`SCL_LOW)//scl为低
begin
if(num == 4'd8)
begin
num <= 4'd0;
sda_r <= 1'b1;
sda_link <= 1'b0;
state <= ACK2;
end
else
begin
sda_link <= 1'b1;
state <= ADD2;
num <= num+1'b1;
sda_r <= db_r[4'd7-num];//按位送寄存器地址
end
end
else
state <= ADD2;
end
ACK2: begin//应答
if(`SCL_NEG)
begin
case(times)//对应寄存器的设定值
3'd1: db_r <= `PWR_MGMT_1_VAL;
3'd2: db_r <= `SMPLRT_DIV_VAL;
3'd3: db_r <= `CONFIG1_VAL;
3'd4: db_r <= `GYRO_CONFIG_VAL;
3'd5: db_r <= `ACC_CONFIG_VAL;
3'd6: db_r <= `DEVICE_READ;
default: db_r <= `DEVICE_READ;
endcase
if(times >= 5'd6)
state <= START2;
else
state <= ADD_EXT;
end
else
state <= ACK2;//等待响应
end
ADD_EXT:begin//初始化一些设定寄存器
if(`SCL_LOW)
begin
if(num == 4'd8)
begin
num <= 4'd0;
sda_r <= 1'b1;
sda_link <= 1'b0;//sda高阻态
state <= ACK_EXT;
end
else
begin
sda_link <= 1'b1;
state <= ADD_EXT;
num <= num+1'b1;
sda_r <= db_r[4'd7-num];//按位设定寄存器工作方式
end
end
else
state <= ADD_EXT;
end
ACK_EXT:begin
if(`SCL_NEG)
begin
sda_r <= 1'b1;//拉高sda
state <= STOP1;
end
else
state <= ACK_EXT;//等待响应
end
START2:begin
if(`SCL_LOW)//scl为低
begin
sda_link <= 1'b1;//sda为输出
sda_r <= 1'b1;//拉高sda
state <= START2;
end
else if(`SCL_HIG)//scl为高
begin
sda_r <= 1'b0;//拉低sda,产生start信号
state <= ADD3;
end
else
state <= START2;
end
ADD3: begin
if(`SCL_LOW)//scl位低
begin
if(num == 4'd8)
begin
num <= 4'd0;
sda_r <= 1'b1;//拉高sda
sda_link <= 1'b0;//scl高阻态
state <= ACK3;
end
else
begin
num <= num+1'b1;
sda_r <= db_r[4'd7-num];//按位写入读取寄存器地址
state <= ADD3;
end
end
else state <= ADD3;
end
ACK3: begin
if(`SCL_NEG)
begin
state <= DATA;
sda_link <= 1'b0;//sda高阻态
end
else
state <= ACK3;//等待响应
end
DATA: begin
if(num <= 4'd7)
begin
state <= DATA;
if(`SCL_HIG)
begin
num <= num+1'b1;
case(times)
5'd6: ACC_XH_READ[4'd7-num] <= sda;
5'd7: ACC_XL_READ[4'd7-num] <= sda;
5'd8: ACC_YH_READ[4'd7-num] <= sda;
5'd9: ACC_YL_READ[4'd7-num] <= sda;
5'd10: ACC_ZH_READ[4'd7-num] <= sda;
5'd11: ACC_ZL_READ[4'd7-num] <= sda;
5'd12: GYRO_XH_READ[4'd7-num] <= sda;
5'd13: GYRO_XL_READ[4'd7-num] <= sda;
5'd14: GYRO_YH_READ[4'd7-num] <= sda;
5'd15: GYRO_YL_READ[4'd7-num] <= sda;
5'd16: GYRO_ZH_READ[4'd7-num] <= sda;
5'd17: GYRO_ZL_READ[4'd7-num] <= sda;
default: ;//暂时未考虑,可添加代码提高系统稳定性
endcase
end
end
else if((`SCL_LOW)&&(num == 4'd8))
begin
sda_link <= 1'b1;//sda为输出
num <= 4'd0;//计数清零
state <= ACK4;
end
else
state <= DATA;
end
ACK4: begin
if(times == 5'd17)
times <= 5'd0;
if(`SCL_NEG)
begin
sda_r <= 1'b1;//拉高sda
state <= STOP1;
end
else
state <= ACK4;//等待响应
end
STOP1:begin
if(`SCL_LOW)//scl为低
begin
sda_link <= 1'b1;//sda输出
sda_r <= 1'b0;//拉低sda
state <= STOP1;
end
else if(`SCL_HIG)//sda为高
begin
sda_r <= 1'b1;//拉高sda,产生stop信号
state <= STOP2;
end
else
state <= STOP1;
end
STOP2:begin
if(`SCL_LOW)
sda_r <= 1'b1;
else if(cnt_10ms == 20'hffff0)//约10ms得一个数据
state <= IDLE;
else
state <= STOP2;
end
default:state <= IDLE;
endcase
end
assign sda = sda_link?sda_r:1'bz;
endmodule
当然只要做一点点修改就可以了,我这里用signaltap来测了
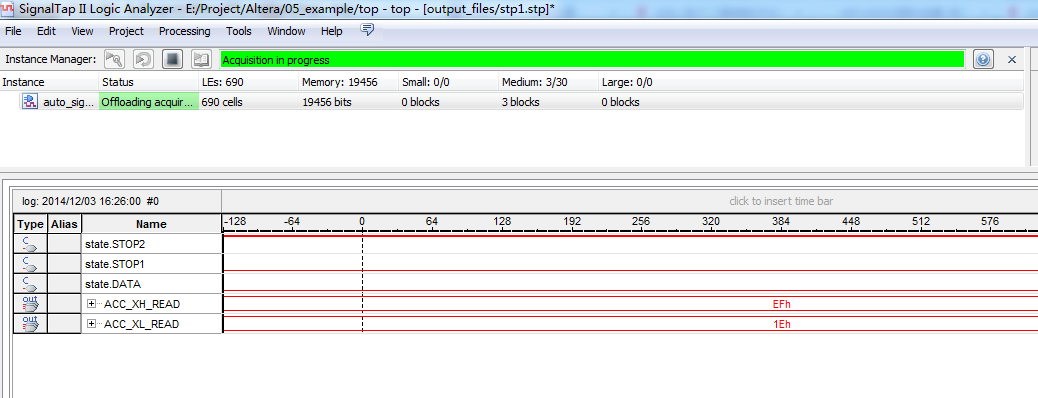
确实可以直接使用,不过,我得自己把这一套东西都整明白了,最后封装成比较好移植的代码,后面包括一些其他的I2c接口的东西,比如LM75,PCF8563,后面一起搞定它。
楼主后期的分享肯定就在后面了。哈哈
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

