无线控制试验:
采用原子的开发板,接NRL2401,使用按键发射无线信号,控制小车的前进、后退、向左、向右
自平衡车接NRL2401作为无线接收端

发射控制程序如下:
key=KEY_Scan(1);
if(key)
{
switch(key)
{
case WKUP_PRES: //前进
LCD_ShowString(30,170,239,32,16,"Sended DATA1:");
NRF24L01_TX_Mode();
for(t=0;t<32;t++)
{
tmp_buf[t]='Q';
}
tmp_buf[32]=0;//¼ÓÈë½áÊø·û
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
LCD_ShowString(0,190,lcddev.width-1,32,16,tmp_buf);
delay_ms(100);
}
tmp_buf[1]='X';
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
LCD_ShowString(0,230,lcddev.width-1,32,16,tmp_buf);
delay_ms(10);
}
break;
其它程序类似
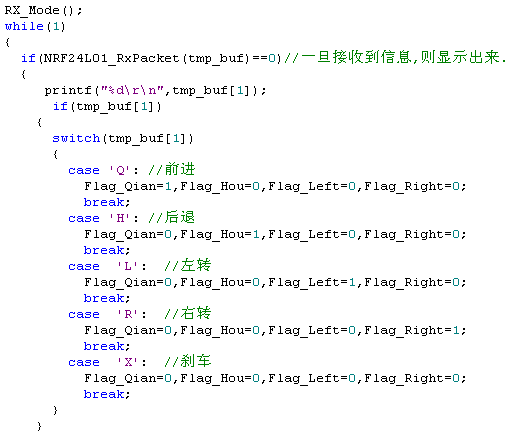
小车的接收程序如下:

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

