
许多工业自动化 (IA) 应用要求能够在不进行物理接触的情况下感知物体或人体的存在和/或位置,以避免约束或限制所感知物体的移动。接近传感器非常适合这一用处。但接近传感器有很多种类,包括电磁式、电容式、电感式和光学式,被检测物体的材料组成也可能会影响传感器检测其存在的能力。
有些接近传感器对探测黑色金属很有用,而有些可以探测任何种类的金属,还有一些可以探测任何类型的物体,甚至是人体。工业自动化应用中接近传感器的潜在用户必须了解不同的接近传感器技术类型及其对特定感应情况的适用性。
本文讨论了几种类型的传感器,并详细介绍了它们能够感知的物体类型和每种器件类型的空间灵敏度。最后介绍了几款来自 Texas Instruments、Red Lion Controls、Littelfuse Inc.、Omron Electronics Inc.、MaxBoTIx Inc. 和 Carlo Gavazzi Inc. 实例器件。
电感式接近传感器
电感式接近传感器能够检测导电(即金属)物体的存在,其感应范围取决于被检测金属的类型。这些传感器利用振荡电路中线圈产生的高频磁场进行操作。接近磁场的导电目标会在其中产生感应或涡流,形成一个相反的磁场,有效降低了电感式传感器的电感量。
电感式接近传感器工作方式有两种。在第一种工作方法中,当目标接近传感器时,感应电流增加,这增加了振荡电路的负载,导致其振荡被衰减或停止。该传感器用一个振幅检测电路检测这种振荡状态的变化,并输出一个检测信号。
另一种工作方式是,使用因导电目标的存在而产生的频率变化,而不是振幅的变化。非铁金属目标,如铝或铜接近传感器会导致振荡频率增加,而铁金属目标,如铁或钢会导致振荡频率降低。振荡频率相对于参考频率的变化导致传感器的输出状态改变。
Texas Instruments 的 LDC0851HDSGT 是一个近距离电感式接近开关传感器,它利用频率的变化来检测其电磁场内是否存在导电物体(图 1)。
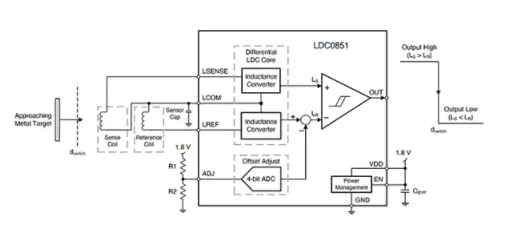
图 1:LDC0851HDSGT 电感式接近传感器使用双电感线圈(感应线圈和参考线圈)来测量感应线圈附近的目标物体引起的电感量变化。(图片来源:Texas Instruments)
LDC0851 电感式接近开关是非接触式接近检测应用的理想选择,如存在检测、事件计数和感应范围小于 10 毫米(0.39 英寸)的简单按钮。当一个导电物体在感应线圈附近移动时,该器件就会改变其输出状态。差分实现(使用感应和参考线圈来确定系统的相对电感)和滞后用于保证可靠的开关,使之不受机械振动、温度变化或湿度影响。
LDC0851HDSGT 的电感式拾音器线圈用一个传感器电容进行调谐,将振荡频率设定在 3 至 19 兆赫 (MHz) 范围内。当感应电感低于参考电感时,推挽输出处于低电平状态,反之则返回到高电平状态。
磁性接近传感器
磁性接近检测器用于测量移动金属部件的位置和速度,可以是霍尔效应传感器这样的有源器件,也可以是可变磁阻 (VR) 传感器这样的无源器件,如 Red Lion Controls 的 MP62TA00 螺纹式磁性拾音器(图 2,左)。可变磁阻接近传感器测量磁阻的变化(类似于电路中的电阻),它由一个永磁铁、一个极片和一个封闭在圆柱形外壳中的传感线圈组成。
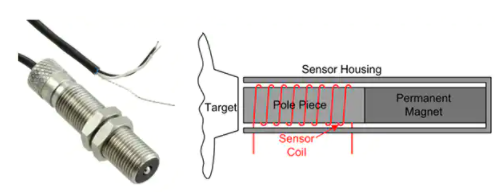
图 2:VR 磁性拾音器(图左)是一个无源传感器,可以感应到极片和传感器外壳(图右)之间的磁场变化。(图片来源:Art Pini,MP62TA00 图片来自 Red Lion Controls)
一个铁磁性物体从极片旁紧密通过,会引起磁场的变化。这种变化又会在信号线圈中产生一个信号电压。信号电压的大小取决于目标物体的大小、速度以及极片和物体之间的间隙大小。目标物体必须处于运动状态才能被 VR 传感器感应到。MP62TA00 纹式磁性拾音器是一种采用环氧树脂封装的 VR 接近传感器,工作温度范围为 -40 至 +107℃。它有一英寸(25.4 毫米 (mm))长,带有一个 ¼ - 40 UNS 螺纹体。
VR 传感器是无源器件,所以它们不需要电源。因此,它们通常用于测量旋转的机器。例如,像 MP62TA00 这样的 VR 拾音器被广泛用于感应铁质齿轮、链轮或正时皮带轮上的通过齿。它们还可用于感应螺栓头、键槽或其他快速移动的金属目标(图 3)。
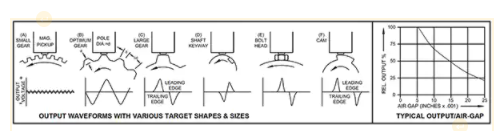
图 3:VR 传感器广泛用于感知旋转机械中的轮齿、凸轮和键槽。(图片来源:Red Lion Controls)
它们被用作转速计来测量转速,成对使用时也可用于测量旋转轴的偏心率。
第二种类型的磁性传感器则使用霍尔效应来检测磁场的存在。霍尔效应描述了载流导体和垂直于该导体平面的磁场的相互作用。当一个载流导体被置于一个磁场中时,将产生一个与电流和磁场都垂直的电压(霍尔电压)。霍尔电压与磁场的磁通密度成正比,需要一个被磁化的目标。
Littelfuse Inc. 的 55100-3H-02-A 是一种法兰安装霍尔效应传感器,可提供数字输出或可编程的模拟电压输出(图 4)。
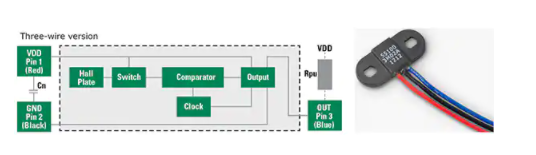
图 4:55100-3H-02-A 带电压输出的法兰安装霍尔效应接近传感器框图和照片。(图片来源:Littelfuse, Inc.)
55100-3H-02-A 尺寸为 25.5 x 11 x 3 mm,可提供三线电压输出或两线电流输出。两个版本都提供中(130 高斯)、高(59 高斯)或可编程灵敏度。该器件具有高灵敏度,使用指定的磁铁,激活范围为 18 毫米(0.709 英寸)。下拉输出可以灌入最高 24 伏的直流电压和 20 毫安 (mA) 电流。
这种传感器可以在最高 10 千赫兹 (kHz) 的开关速率下工作,并能感知动态和静态磁场。检测静态磁场的能力是霍尔效应传感器的一个主要优点,因为它可以用来感知一扇正在关闭的门或一个处于固定位置的物体。
光学接近传感器
光学接近传感器使用光(红外线或可见光)来感应物体。其优点是,目标不需要有磁性或是金属,只要能阻挡或反射光线就可以了。基本原理是,光学传感器发出光并监测从目标物体上反射的光(图 5,左)。
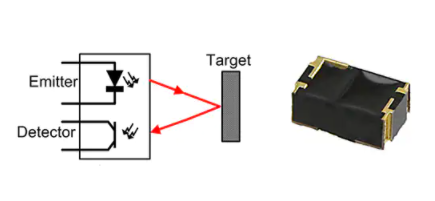
图 5:光学接近传感器通过****一束光并检测目标反射回来的光来定位目标物体。(图片来源:Art Pini)
Omron Electronics Inc. 的 EE-SY1200 是一个出色的光学接近传感器实例(图 5,右)。它是一个安装在小型印刷电路板上的超紧凑光传感器,工作在 850 纳米 (nm) 的红外波长下。它包括一对 LED ****和光电晶体管,采用表面贴装封装,尺寸为 1.9 x 3.2 x 1.1 毫米(0.0748 x 0.126 x 0.043英寸),工作温度范围为 -25 至 +85℃。其推荐感应距离范围为 1.0 至 4.0 毫米(0.039 至 0.157 英寸)。
由于它采用小尺寸板安装,因此成为如自动缠绕机中金属化麦拉材料对准之类应用的理想选择。
超声波接近传感器
感应距离要求更远时,如检测免下车窗口的汽车时,可以使用基于超声波的接近传感器来处理。这些传感器可在多至数米 (m) 的距离内探测任何类型的物体。基本原理是,测量传感器****发出超声波脉冲,然后被目标物体反射并被传感器接收器拾取的飞行时间(图 6)。
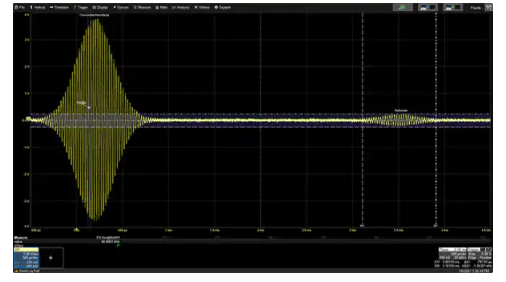
图 6:使用超声波进行测距时,测量从********超声波脉冲(左)到反射脉冲返回(右)的时间。这个时间是初始脉冲从传感器到目标物体的飞行时间的两倍。(图片来源:Art Pini)
从****脉冲到接收反射的时间代表了从传感器到目标物体再返回的飞行时间。知道了传播的速度和飞行的时间,就可以计算出距离。在所示例子中,飞行时间是 3.1 毫秒 (ms)。对于空气来说,在 70 华氏度,声音的速度是每秒 1128 英尺,所以到物体并返回的的总距离是 3.50 英尺。从传感器到物体的距离是飞行时间的一半或 1.75 英尺。
MatBoTIx Inc. 的 MB1634-000 是一种超声波接近传感器,测量范围为 5 米(16.4 英尺)。它需要一个 2.5 至 5.5 伏的电源,工作频率为 42 kHz,它将到目标的距离输出为模拟电压、脉冲宽度或晶体管-晶体管逻辑 (TTL) 串行数据流。它针对目标尺寸变化、工作电压和内部温度(可选择外部温度补偿)进行了补偿,所有这些功能都封装在一个小于一立方英寸的封装中——0.875 x 1.498 x 0.58 英寸(22.23 x 38.05 x 14.73 毫米)(图 7)。

图 7:MB1634-000 是一个带有****和接收传感器的超声波测距仪组件,范围为 5 米。(图片来源:MaxBoTIx Inc.)
电容式接近传感器
电容式接近传感器可以检测粉末、颗粒、液体和固体形式的金属和非金属目标。一个很好的实例是 Carlo Gavazzi 的 CD50CNF06NO(图 8)。该器件通常与电感式传感器相似,只是电感式传感器的感应线圈被电容式感应板所取代。它们最常用于感应储罐中的液位。
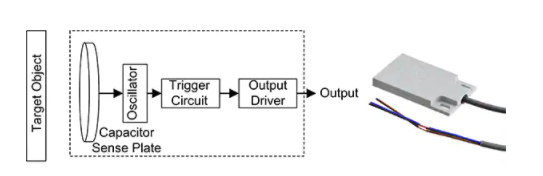
图 8:在一个通用的电容式接近传感器中(左),电容式感应板与外部目标物体形成一个电容;电容值决定了振荡器的频率。Carlo Gavazzi 的 CD50CNF06NO(右)是一个用于监测液位的电容式接近传感器。(图片来源:Art Pini)
传感器中的感应板与目标物体形成一个电容,电容随着与物体的距离变化而变化。感应目标电容决定了振荡器的频率,对该频率进行监测,便可在越过阈值频率时切换输出状态。
CD50CNF06N0 用于监测液位。它是一个三线传感器,带有一个开集 NPN 晶体管,配置为常开模式。它采用 10 至 30 伏直流电源,封装尺寸为 50 x 30 x 7 mm(1.97 x 1.18 x 0.28 英寸),感应范围为 6 毫米(0.24 英寸)。在其常用液位检测应用中,一般用螺钉或粘胶将该器件固定在非金属罐的外表面。
结语
接近传感器采用的技术有多种类型,适合的应用各种各样。根据传感器的类型,它们可以探测金属和非金属目标,感应距离从几毫米到五米或更远。它们足够紧凑,可以在狭小的空间内工作,许多还能够工作在恶劣环境中。市场上有一系列技术实现方法,为用户提供了多种选择,可满足无数的接近检测要求。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

