
经过验证这种判断错了!!
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE , ENABLE);
GPIO_InitStruct.GPIO_Pin=MY_LED_ALL;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
//GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(MY_LED_GPIOE , &GPIO_InitStruct);
case 0:
//MY_LED_GPIOE->BRR=LED1;
//MY_LED_GPIOE->BSRR=LED4;
GPIO_SetBits(MY_LED_GPIOE,MY_LED_ALL);
GPIO_ResetBits(MY_LED_GPIOE,LED1);
break;
case 1:
//MY_LED_GPIOE->BRR=LED2;
//MY_LED_GPIOE->BSRR=LED1;
GPIO_SetBits(MY_LED_GPIOE,LED1);
GPIO_ResetBits(MY_LED_GPIOE,LED2);
break;
case 2:
//MY_LED_GPIOE->BRR=LED3;
//MY_LED_GPIOE->BSRR=LED2;
GPIO_SetBits(MY_LED_GPIOE,LED2);
GPIO_ResetBits(MY_LED_GPIOE,LED3);
break;
case 3:
//MY_LED_GPIOE->BRR=LED4;
//MY_LED_GPIOE->BSRR=LED3;
GPIO_SetBits(MY_LED_GPIOE,LED3);
GPIO_ResetBits(MY_LED_GPIOE,LED4);
break;
case 4:
GPIO_SetBits(MY_LED_GPIOE,LED4);
//GPIO_ResetBits(MY_LED_GPIOE,LED3);
break;
case 5:
//GPIO_SetBits(MY_LED_GPIOE,LED2);
GPIO_ResetBits(MY_LED_GPIOE,LED4);
break;
case 6:
GPIO_SetBits(MY_LED_GPIOE,LED4);
GPIO_ResetBits(MY_LED_GPIOE,LED3);
break;
case 7:
GPIO_SetBits(MY_LED_GPIOE,LED3);
GPIO_ResetBits(MY_LED_GPIOE,LED2);
break;
case 8:
GPIO_SetBits(MY_LED_GPIOE,LED2);
GPIO_ResetBits(MY_LED_GPIOE,LED1);
break;
case 9:
GPIO_SetBits(MY_LED_GPIOE,MY_LED_ALL);
break;
case 10:
GPIO_ResetBits(MY_LED_GPIOE,LED1);
break;
case 11:
GPIO_ResetBits(MY_LED_GPIOE,LED2);
break;
case 12:
GPIO_ResetBits(MY_LED_GPIOE,LED3);
break;
case 13:
GPIO_ResetBits(MY_LED_GPIOE,LED4);
break;
case 14:
break;
case 15:
GPIO_SetBits(MY_LED_GPIOE,LED4);
break;
case 16:
GPIO_SetBits(MY_LED_GPIOE,LED3);
break;
case 17:
GPIO_SetBits(MY_LED_GPIOE,LED2);
break;
case 18:
GPIO_SetBits(MY_LED_GPIOE,LED1);
break;
case 19:
GPIO_ResetBits(MY_LED_GPIOE,MY_LED_ALL);
break;
case 20:
GPIO_SetBits(MY_LED_GPIOE,MY_LED_ALL);
break;
case 21:
GPIO_ResetBits(MY_LED_GPIOE,LED4);
break;
case 22:
GPIO_ResetBits(MY_LED_GPIOE,LED3);
GPIO_SetBits(MY_LED_GPIOE,LED4);
break;
case 23:
GPIO_ResetBits(MY_LED_GPIOE,LED2);
GPIO_SetBits(MY_LED_GPIOE,LED3);
break;
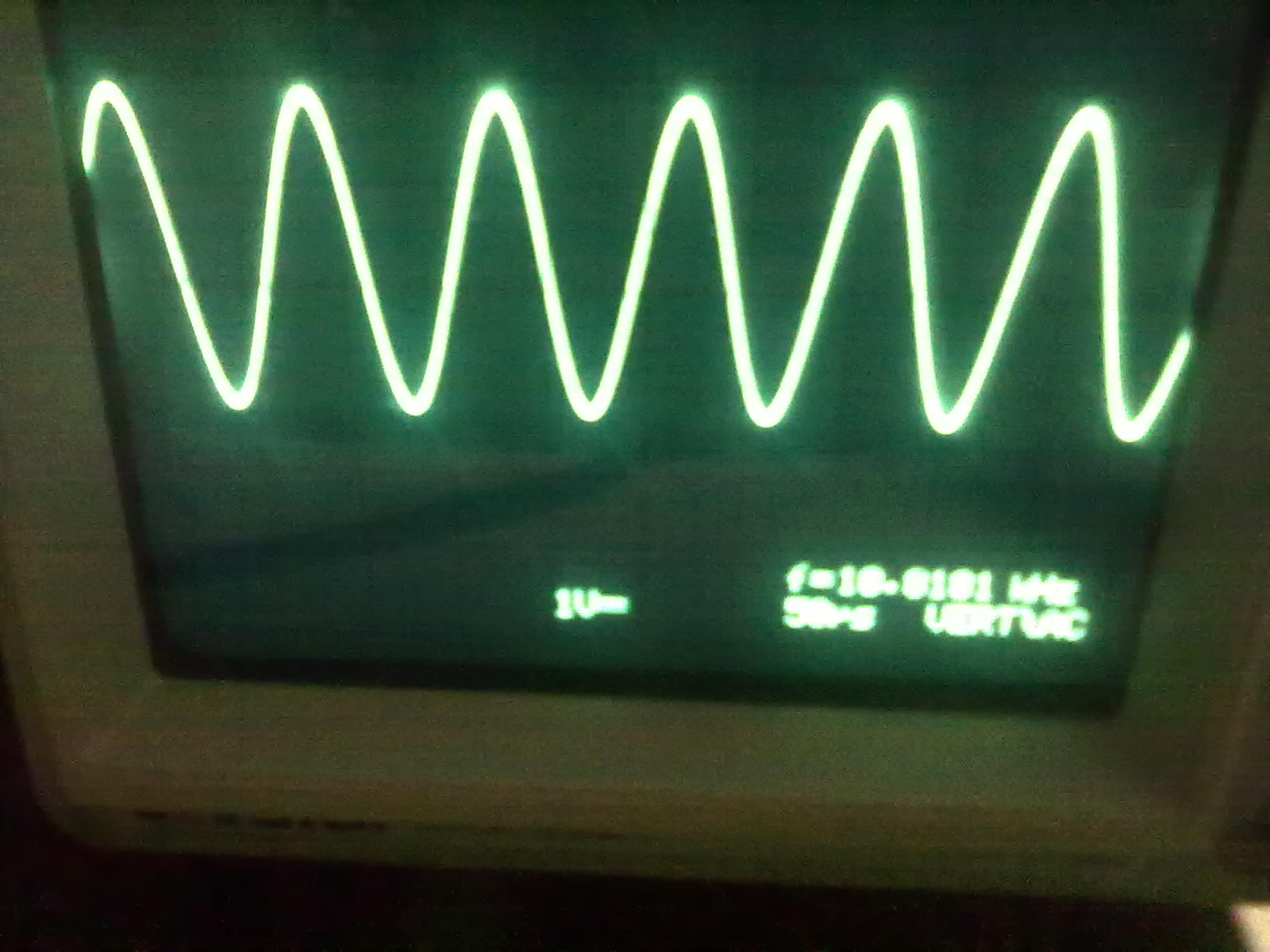
正弦波关键代码:(DAC用的是单通道)
TIM_InitStruct.TIM_Period = 0x19;
TIM_InitStruct.TIM_Prescaler = 0x0;
TIM_InitStruct.TIM_ClockDivision = 0x0;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2 , &TIM_InitStruct);
/*TIM_PrescalerConfig(TIM6, 0xF, TIM_PSCReloadMode_Update);
TIM_SetAutoreload(TIM6, 0xFF);
TIM6 TRGO selection */
//TIM_SelectOutputTrigger(TIM6, TIM_TRGOSource_Update);
TIM_SelectOutputTrigger(TIM2 , TIM_TRGOSource_Update);
/* DAC 构造 */
DAC_InitStruct.DAC_Trigger = DAC_Trigger_T2_TRGO;
DAC_InitStruct.DAC_WaveGeneration = DAC_WaveGeneration_None;
DAC_InitStruct.DAC_LFSRUnmask_TriangleAmplitude = DAC_TriangleAmplitude_2047;
DAC_InitStruct.DAC_OutputBuffer = DAC_OutputBuffer_Disable;
DAC_Init(DAC_Channel_1 , &DAC_InitStruct);
for(Idx=0;Idx<256;Idx++)
{
SigSine12bit[Idx] = (0xffff0000 << 16) + (Sine12bit[Idx]);
}/**/
/* DMA 构造 */
DMA_InitStruct.DMA_PeripheralBaseAddr = 0x40007408;
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)&SigSine12bit;
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStruct.DMA_BufferSize = 256;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;
DMA_InitStruct.DMA_Mode = DMA_Mode_Circular;
DMA_InitStruct.DMA_Priority = DMA_Priority_High;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA2_Channel3 , &DMA_InitStruct);//要用DMA2
DMA_Cmd(DMA2_Channel3 , ENABLE);//使能DMA2
DAC_Cmd(DAC_Channel_1 , ENABLE);//使能DAC通道1
DAC_DMACmd(DAC_Channel_1 , ENABLE);
TIM_Cmd(TIM2 , ENABLE);
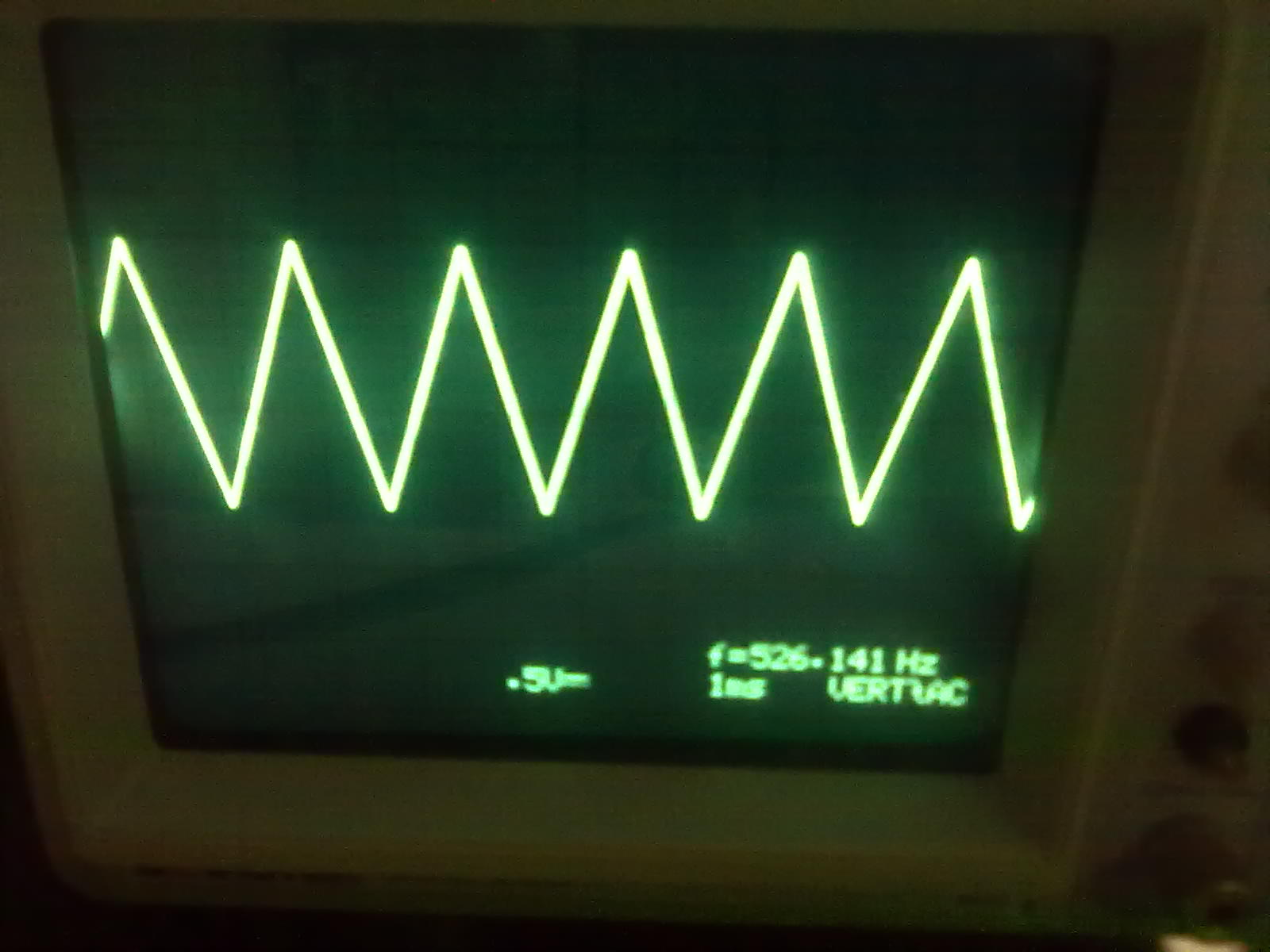
三角波关键代码:
TIM_InitStruct.TIM_Period = 0x19;
TIM_InitStruct.TIM_Prescaler = 0x0;
TIM_InitStruct.TIM_ClockDivision = 0x0;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2 , &TIM_InitStruct);
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update);
/* Set GPIO_DAC */
GPIOA_InitStruct.GPIO_Pin = GPIO_Pin_4;
GPIOA_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIOA_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(DAC_GPIOA , &GPIOA_InitStruct);
/* Set DAC */
//DAC_Cmd(DAC_Channel_1,ENABLE);
DAC_InitStruct.DAC_Trigger = DAC_Trigger_T2_TRGO;
DAC_InitStruct.DAC_LFSRUnmask_TriangleAmplitude = DAC_TriangleAmplitude_2047;
DAC_InitStruct.DAC_OutputBuffer = DAC_OutputBuffer_Disable;
DAC_InitStruct.DAC_WaveGeneration = DAC_WaveGeneration_Triangle;//三角波触发方式
DAC_Init(DAC_Channel_1 , &DAC_InitStruct);
DAC_Cmd(DAC_Channel_1, ENABLE);//使能DAC通道1
DAC_SetChannel1Data(DAC_Align_12b_R , 0x000);
TIM_Cmd(TIM2 , ENABLE);
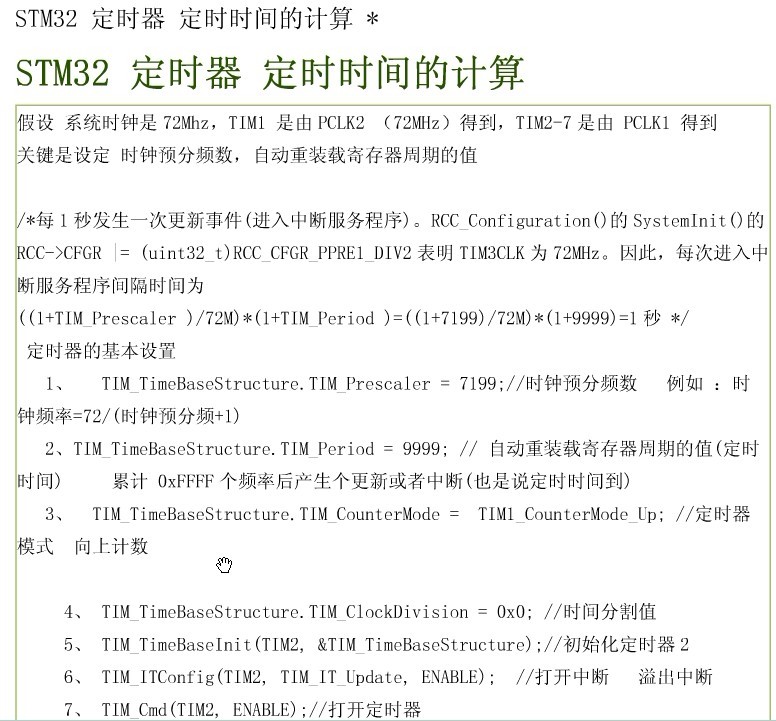
定时器定时和中断先附上代码(没有相机,要找别人借,这得天天麻烦别人囧)
/* 结构体 */
TIM_TimeBaseInitTypeDef TIM_BaseInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//TIM_OCInitTypeDef TIM_OCInitStruct;
/* 构造基本定时单元TIM2 */
TIM_BaseInitStruct.TIM_Prescaler = 9999;
TIM_BaseInitStruct.TIM_Period = 7199;
TIM_BaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_BaseInitStruct.TIM_ClockDivision = 0x0;
TIM_TimeBaseInit(TIM2 , &TIM_BaseInitStruct);
/*TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_Timing;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStruct.TIM_Pulse = 0x0;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStruct.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStruct.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStruct.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM2 , &TIM_OCInitStruct);*/
/* 构造嵌套向量中断控制 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 4;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
/* 开启时钟中断 */
TIM_ITConfig(TIM2 , TIM_IT_Update , ENABLE);
/* 使能定时器2 */
TIM_Cmd(TIM2 , ENABLE);
自己手上的固件库使用手册不是最新版的,而固件库是最新版的,不搭!结果悲剧,NVIC让我搞半天,NVIC头文件是misc.h旧版的却是stm32f10x_nvic.h!
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

