
CAN双机通信经验分享
楼上:如果你只有一部STM32,那么是没有必要使用中断的。这时。主程序大概是这样的:在进入for()前CAN_Polling()只执行1次,然后你判断返回的标志位去显示LED.如果要不断发送,就把该函数移到循环中。
int main(void)
{
//片内硬件初始化
FAG=CAN_Polling(); //如果没有节点通信,则使用自发自收通信 FAG是预先定义的标志位
// CAN_Interrupt();//如果有节点通信,则使用节点通信
for(;;)
{
//FAG=CAN_Polling();移到这里就可以反复发送接收。
//这里加入你要显示结果的函数
}
}
bool CAN_Polling(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
CanTxMsg TxMessage;
CanRxMsg RxMessage;
u16 i=0;
u8 TransmitMailbox;
/* CAN register init */
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
/* CAN cell init */
CAN_InitStructure.CAN_TTCM=DISABLE; //时间触发
CAN_InitStructure.CAN_ABOM=DISABLE; //自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE; //自动唤醒
CAN_InitStructure.CAN_NART=ENABLE; //自动重传(注意,DISABLE才是自动重传)
CAN_InitStructure.CAN_RFLM=DISABLE; //失能FIFO锁定模式
CAN_InitStructure.CAN_TXFP=ENABLE; //失能FIFO优先级
CAN_InitStructure.CAN_Mode=CAN_Mode_LoopBack; //环回模式,自发自收
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1=CAN_BS1_8tq;
CAN_InitStructure.CAN_BS2=CAN_BS2_7tq;
CAN_InitStructure.CAN_Prescaler=5;
CAN_Init(CAN1,&CAN_InitStructure);
/* CAN 过滤器设置 */
CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器编号(0-13)
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //过滤方式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //位宽
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=0;//CAN_FIFO0;
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;
CAN_FilterInit(&CAN_FilterInitStructure);
/* transmit */
TxMessage.StdId=0x11;
//TxMessage.ExtId=0x34;
TxMessage.RTR=CAN_RTR_DATA;
TxMessage.IDE=CAN_ID_STD;
TxMessage.DLC=2;
TxMessage.Data[0]=send_adc&0xff;; //这里传送的已经是ADC的数据了。
TxMessage.Data[1]=send_adc8;
TransmitMailbox=CAN_Transmit(CAN1,&TxMessage);//这句是发送
i=0;
while((CAN_TransmitStatus(CAN1,TransmitMailbox)!=CANTXOK)&&(i!=0xFF)) i++;
i=0;
while((CAN_MessagePending(CAN1,CAN_FIFO0)
RxMessage.StdId=0x00;
RxMessage.IDE=CAN_ID_STD; //标准包
RxMessage.DLC=2;
RxMessage.Data[0]=0x00;
RxMessage.Data[1]=0x00;
CAN_Receive(CAN1,CAN_FIFO0, &RxMessage);//这里是接收
if (RxMessage.StdId!=0x11) return FALSE;
if (RxMessage.IDE!=CAN_ID_STD) return FALSE;
if (RxMessage.DLC!=2) return FALSE;
if ((RxMessage.Data[0]<<8|RxMessage.Data[1])!=0xAAAA) return FALSE;
return TRUE;
}
如果你使用单机进行调试,又打开了CAN中断,则有可能因为没有节点,使中断程序一直挂起。
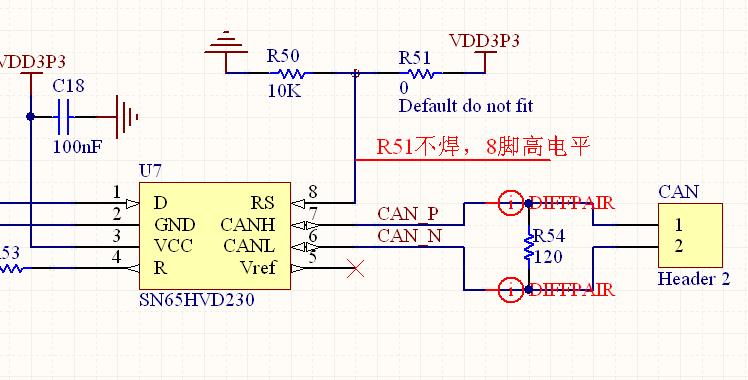
写错了:是R50和R51。
或如下图
我把自循环的源代码整个工程都上传大家共享。 下载后解压缩,编译后执行,ADC我是设定在原来超声波的接口通道9,你可以在代码中修改到你所需要的通道。
点击进入下载CAN自测试.rar
还有要注意的是当两台机器其中1台未通电或双绞线未接通,这时是测试不到输出波形的。
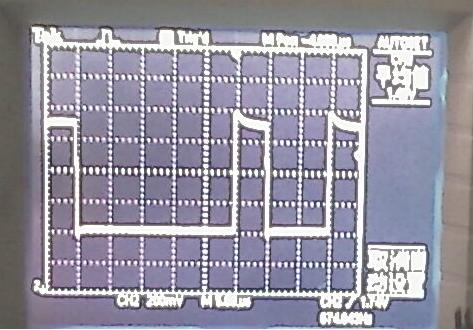
图1 CAN接口正常的波形
一手按快门,一手按发送按键,照片抖动厉害,看不很清楚,示波器放在垂直200mV/格,水平5uS/格。当你能看到这样的波形时,起码刚发送的这台机器发送功能是正常的,且2台机的通信节点也连通了。
况且我的LCD与大家都不同,直接COPY过去是无法使用的。饭要一口一口咀嚼才有味道,当你凭自己努力搞定一个难题后,那种满足感和成就感是任何语言都无法形容的呀!对吗?
ARM DIY进程11:USB虚拟鼠标
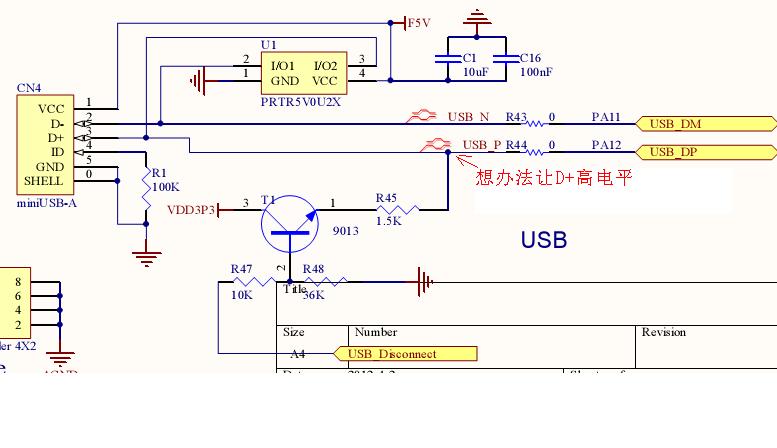
练习利用开发板上的USB接口实现免驱动鼠标功能,免驱动鼠标属于人机交互设备HID。本次练习需要4只按键实现鼠标光标上下左右移动,开发板上的按键接口太少,只好在板外另外搭接4只按键使用,见图1。在开发板上“USB_Disconnect”通过JP2连接到GPIOA_10注明缺省状态为“Open”,此时T1(9013)由于B极0偏置故C-E极截至,USB接口第3脚D+将为0V,PC机将认不到插入的USB设备。所以要么将JP2短接,并在程序中设PA10为输出口并输出高电平,要么直接将R47接JP2端连接到3.3V或干脆将T1的C-E极直接短路来调试(图3)。
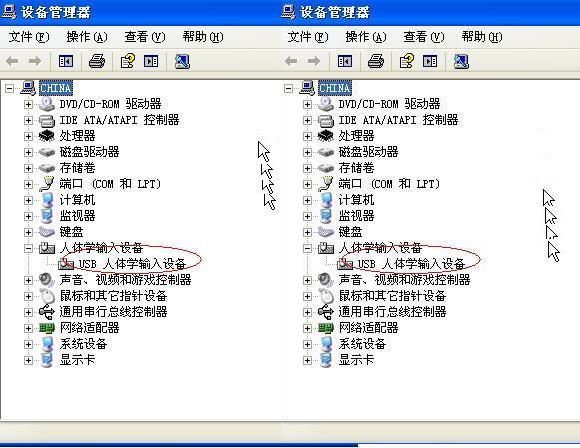
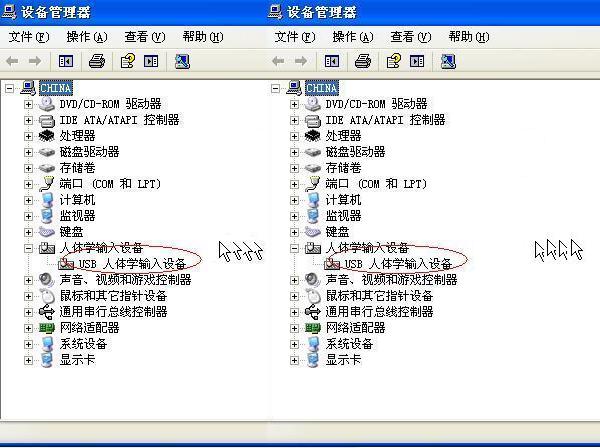
说实在话,这个USB从底层一直到用户层,实在是太复杂了,要弄通它不是几个练习就可以做到的。本次练习只不过是发挥了DIY者的的特长:COPY+PASTE东拼西凑完成的,详细原理在此就不敢班门弄斧了。从ST官方网站下载的MDK例程JoStickMouse在开发板上都无法成功运行。本例程是移植了ST官方IAR的例程的。运行后仿真环境就无法进入DEBUG跟踪、断点了。当虚拟鼠标USB设备被PC识别后,在WindowsXP设备管理器里会增加一个USB人体学输入设备(图4图5),这时按UP、DN、RIGTH、LEFT其中一键屏幕上的鼠标会朝不同方向移动,移动的速度可在"HW_CONFIG.H"头文件的CURSOR_STEP变量中重新定义。有时侯增加的USB人体学输入设备会出现黄色问号警告,只要拔去USB连接线,把这个设备卸载,然后重新插上USB连接线,系统就会自动安装新设备正常工作了。
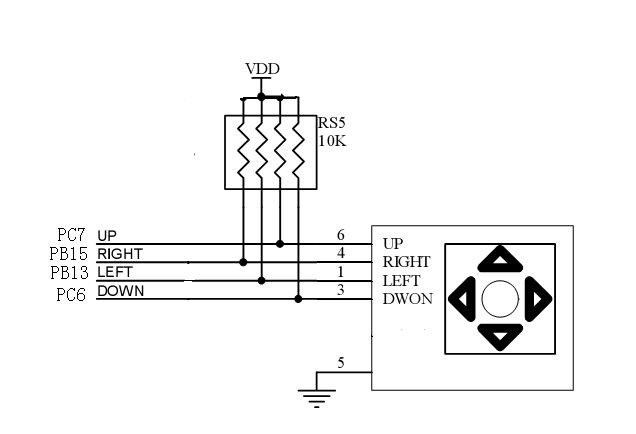
图1

图2
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

