
| 使用嵌入式RTLinux OS组建机器人控制系统(2) 写于: 星期三 01 十月 @ 04:53:58 |
使用嵌入式RTLinux OS组建机器人控制系统
在我的系统中,titechwire不进行复杂的运动姿态和控制算法计算.它把各个电机的角度打包利用socket通过无线LAN上传给PC机,该机器上运行我用Visual C++ 写的控制算法和姿态计算程序,程序把计算后各个电机应该转动的角度命令打包在通过Winsock传给titechwire.titechwire把12个关节的角度分配给各个titech robot dirver.如此循环.控制程序为了计算矩阵方便快速采用了Matlab数学库接口Matcom 4.5中的Matlib
关键词: TITech Wire, TITech-Wire, TITechWire.
在此之前,我已经有了利用Visual C++和Matlib在Windows 9x下直接控制ISA Bus的DA卡和Counter卡进行第一代机器人控制的经验.现在高层程序不变,底层移植到Linux上,中层程序改用网络通讯实现.
购入的titechwire系统有如下部分
1.1组装
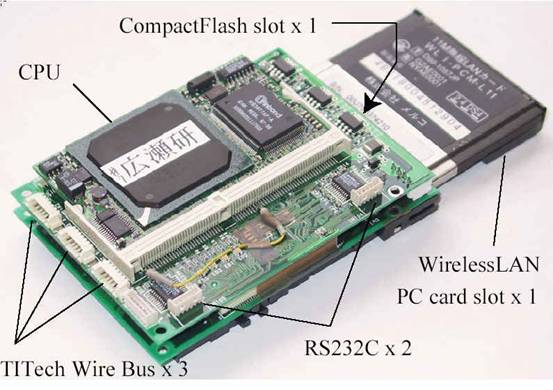
以上步骤完成后,基本系统如图Fig. 1所示
Fig. 1 CPU板,主板,PCMCIA板,无线网卡组成基本系统
1.2 Run it to Test Titechwire设计时,没有保留显示器接口,和键盘接口.因此无法利用外界键盘和显示器的方法,像对付普通pc机那样对付它. titechwire 在购买时,一般预装了操作系统(可能是Windows 9X/NT,Linux),我买的这款预安装了RTLinux(我个人认为应该是Linux,RTLinux不算真正的操作系统,它只不过是寄生在Linux上的一组模块) 可以通过普通计算机运行模拟终端软件,经过RS232来控制titechwire. 首先你需要一条RS232接口电缆,把titechwire上的dsub9和计算机的串口连接起来.这条电缆可以购买,也可以自制.9 然后你需要一台普通pc机.(可以是linux也可以是Windows).先说Windows. 日本学生喜欢用一个软件tero term,其实根本没有必要.Windows自己带了必备的软件HyperTermial中文叫超级终端. 个人认为titechwire的说明资料真TM烂.除了自带光盘外,什么说明书,user guide统统没有.我只好问发明titechwire的实验室,串口的波特率是多少,结果是
现在打开超级终端.设置好串口波特率等通讯格式,然后打开titechwire的电源,(titechwire上面根本没有电源开关,你只好给直流电源加一个开关) titechwire的4个指示灯(LED)一阵狂闪后.Linux boot起来了.超级终端上开始显示整屏幕的启动信息…..NN的Linux启动就是罗嗦. 然后提示: wsap32FE login: 让你输入帐户名,密码. 查阅了光盘所有的资料,还有包装盒子,没有一处著名了Root的密码. 我faint的一塌糊涂……只好打电话问生产商,结果密码是 TW1x520 肚子里用各种词汇骂了一通之后,先动手改密码 passwd 然后把密码改成Quadlator2 (我机器人的名字)
好了,到此为止,至少说明titechwire系统正常能run了
注意:不要使用titech的串口2,titechwire根本就把串口2封了,观察/etc/inittab文件,会发现这样的内容 #Serial lines s1:12345:respawn:/sbin/agetty 19200 ttyS0 vt100 # s1:12345:respawn:/sbin/agetty 19200 ttyS1 vt100 看到了吧,串口2给注释调了.多黑!
1.3配置无线网络 必须配置无线网络!,否则太不爽了.理由主要如下 l 你要用自己写的程序控制机器人,titechwire仅仅自带了一个基本的操作系统.连编译器都没有(gcc).所以你不要指望在titechwire上写程序,并且编译(编辑器只有vi,不是vim你估计受不了) l 要把写好程序的程序编译复制到titechwire上,光靠串口终端肯定没戏.你当然可以用CF卡.可是如果titech安装在机器人的肚子里后,每次都打开肚子,是在麻烦. l 如果有了无线网后,你只要在pc机上写好程序,在ftp过去(有人喜欢用rcp).如果想直接控制他,可以用ssh(或者telnet,烂烂的titechwire竟然保留了telnet)
1.3.1基本网络配置 titechwire能够认出绝大多数无线网卡,这个比较舒服,查看/etc/pcmica/network.opts发现好多无线网卡的模块都有了.因此只要你有无线AP就可以了. 运行ifconfig 系统列出了lo和eth0,说明无线网卡已经工作了.ip是 192.168.100.43 可是我的pc在192.168.0.x的网段内.跑去问管理员,在router上做了一个映射,ok.无线就通了.在自己的pc上ping 192.168.0.43.一切正常
顺便说一句,如果你的无线AP不带router功能.那么你只好手动设置固定ip了.方法如下: 运行netcfg,系统说没有,运行netconfig系统说没有,在烂titechwire上,这些方便的工具都没有,你只好手动改配置文件. 不要指望用ipconfig eth0 ipaddr的方法来改ip那只能改一时,下次就不灵了. 编辑/etc/rc.d/rc.inet1 里面可以改你的ip设置 IPADDR=”192.168.100.43” NETMASK=”255.255.255.0” NETWORK=”192.168.100.0” BROADCAST=”192.168.100.255” GATEWAY=”192.168.100.1” 就成了.当然还要禁止掉dchp 编辑/etc/pcmcia/network 可以看到这样的内容 elif is_true $DHCP; then后面是调用dhcpcd启动去获取ip的脚本,说明要把$DHCP变量设置成NO 继续查看/etc/pcmcia/network.opts 会发现这样的行. DHCP=”y” 把这个改成n就能不启动DHCP
1.3.2改一个酷点的hostname 每次启动都是命名我的机器名字是wasp32FE,是在太土鳖了.决心改一个酷点的hostname 尝试了改了很多配置文件,都不成,最后发现在这里 /etc/pcmcia/network.opts DHCP_HOSTNAME=xxxxxxxxxxxxxxxx 把他注释掉,改成我的机器人名字 DHCP_HOSTNAME=”quadlator”
到此位置,基本上已经把titechwire最基本的东西配置好了.现在你可以在网络上任何一台计算机控制他.(ssh或者telnet,ftp等等). |
共1条
1/1 1 跳转至页
使用嵌入式RTLinux OS组建机器人控制系统(2)
只看楼主 1楼
关键词: 使用 嵌入式 RTLinux 组建 机器人 控制系
共1条
1/1 1 跳转至页
回复
| 有奖活动 | |
|---|---|
| 【有奖活动】分享技术经验,兑换京东卡 | |
| 话不多说,快进群! | |
| 请大声喊出:我要开发板! | |
| 【有奖活动】EEPW网站征稿正在进行时,欢迎踊跃投稿啦 | |
| 奖!发布技术笔记,技术评测贴换取您心仪的礼品 | |
| 打赏了!打赏了!打赏了! | |
| 打赏帖 | |
|---|---|
| 【笔记】生成报错synthdesignERROR被打赏50分 | |
| 【STM32H7S78-DK评测】LTDC+DMA2D驱动RGBLCD屏幕被打赏50分 | |
| 【STM32H7S78-DK评测】Coremark基准测试被打赏50分 | |
| 【STM32H7S78-DK评测】浮点数计算性能测试被打赏50分 | |
| 【STM32H7S78-DK评测】Execute in place(XIP)模式学习笔记被打赏50分 | |
| 每周了解几个硬件知识+buckboost电路(五)被打赏10分 | |
| 【换取逻辑分析仪】RA8 PMU 模块功能寄存器功能说明被打赏20分 | |
| 野火启明6M5适配SPI被打赏20分 | |
| NUCLEO-U083RC学习历程2-串口输出测试被打赏20分 | |
| 【笔记】STM32CUBEIDE的Noruletomaketarget编译问题被打赏50分 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂