
作者:广西大学行建文理学院 蒋海鹏 朱英亮 韦双双
指导教师:唐琳
作品简介
一、开发背景
在21世纪的今天,讲究的是可持续发展,人与自然的和谐。在当今,越来越多的人注意到节能、环保的重要性,这对人类的未来有着重要的意义。开发和利用新能源以及清洁,是我们这次作品的出发点。
二、结构说明
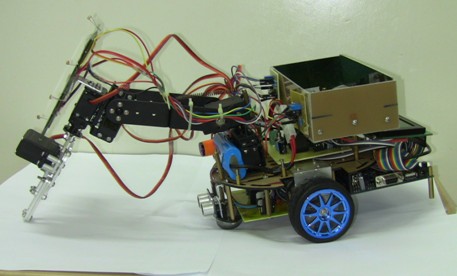
小车整体图
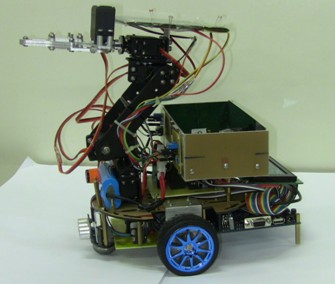
我们的作品模块有以下几块:
1、机械手
5自由度的机械手,主要由5个舵机组合构成。可拾取多角度,多范围内的物品。
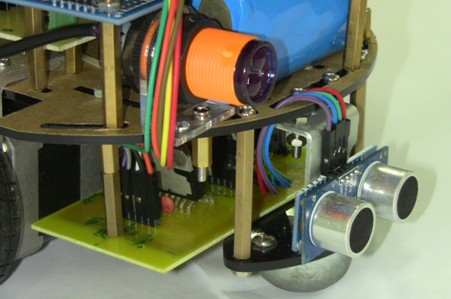
2、红外--超声波模块
由1个超声波及1个红外传感器组成,超声波用于测量距离,红外用于壁障障碍物。组合起来可以实现对物体距离的测量以及“垃圾”与障碍物的区分
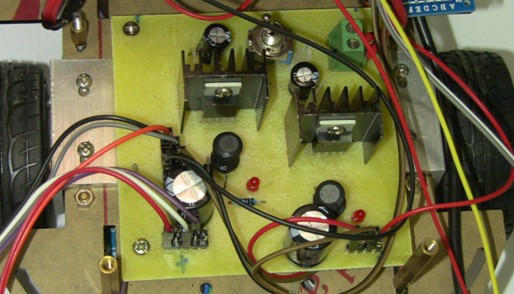
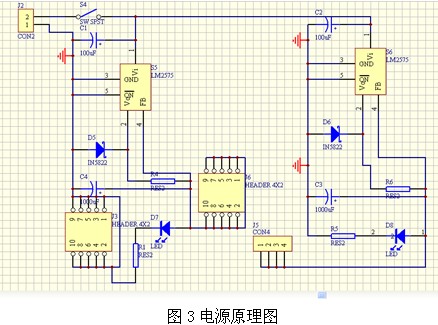
3、电源模块
电源采用两块lm2576芯片,该芯片具有功率大、功耗小供电稳定等优点。机械手为5自由度的,耗电量大需要大功率的电源,lm2576芯片输出电流可达到2A,可以为机械手供电,本车用两组电源供电,让单片机和外围电路在稳定的电压下运行。
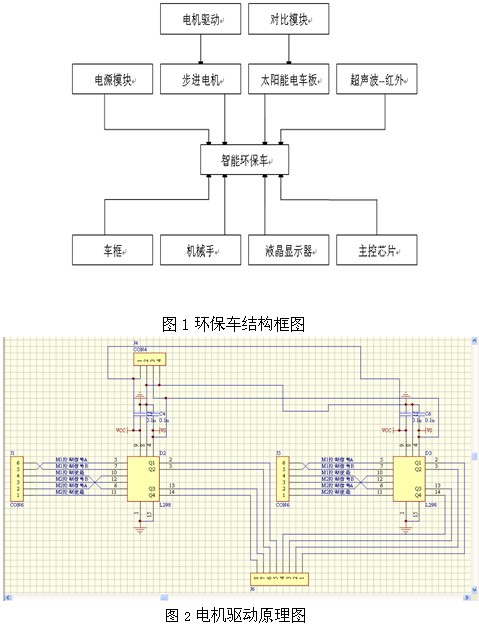
4、电机模块
本车的动力为两个大扭矩步进电机,lm298n为步进电机提供电源驱动,lm298n为4线输出刚好满足我们的两相四线制的步进电机的接线要求,lm298n的外围电路简单、控制方便、驱动能力较强。
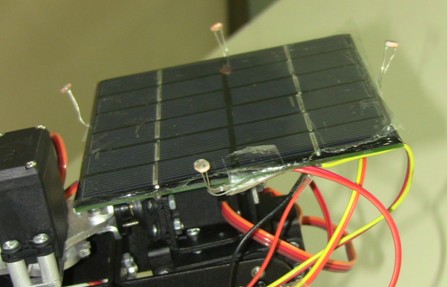
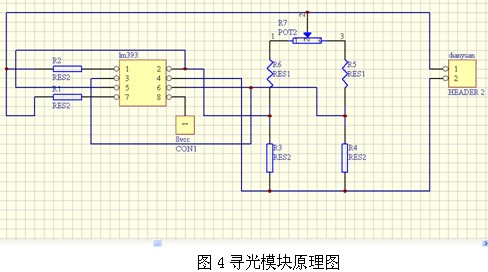
5、寻光模块
太阳能的光强的对比是用的光敏电阻,光越强光敏电阻阻值越小光越弱阻值越大,根据这个特性会在两个光敏电阻下方的产生两个不同的电压值,把这两个电压值送到lm393电压比较器进行比较。
6、主控芯片,STC15F2K61S2芯片为控制核心,该单片机高速、高可靠。有超强抗静电,超强抗干扰等优点。
三、功能与使用说明
我们的作品名称为“智能环保车”。主要功能为清理道路的垃圾,并用机械手夹入车后框。“环保车”不工作的时候,太阳能电池板自动寻光,充电,实现对光源的最大利用,在工作时为其增加续航能力;环保车前方装有壁障模块,能区分障碍物与“垃圾”;利用步进电机可实现比较精确的物体定位;车尾有液晶显示器,实时显示机械手,小车的状态。
虽然我们的“智能环保车”功能较为简单,但在我们的智能环保车上可以给未来环保车上留下很大的意想空间。随着现代新能源的开发,太阳能逐渐被大家所认可,电子信息化、智能化是现代发展的标志。智能环保车将实现无人作业、零排放零污染这样的目标,这将是一种趋势。此外,智能环保车可以进入险区进行排障、救援、监控、运送物质等,往大的方面想还可以探险、排雷等危险工作。通过这些很大程度上体现了智能环保的经济性,实用性。
平台选型说明
单片机开发板(以STC15F2K61S2芯片为控制核心)
设计说明
一、设计思想
环保车作为环卫设备之一,是一种垃圾清扫和运输为一体的新型高效清扫设备,应用与公路、机场、市政广场、城市住宅区等重要场所的清扫保洁。从 20 世纪 60 年代开始,我国开始研制生产路面清扫车,但相比于国外发达国家,在销量规模、技术水平、清扫效果等方面都存在一定的差距。清扫车的尾气污染和噪音污染较大,影响人们的生活质量。随着国家对环保要求越来越高、人们的环保意识普遍增强,石油、煤资源的日益枯竭,及对新型能源的渴求,现有清扫车在清扫效率、耗时等方面不能满足人们的需求。因此开发一款多功能、智能化、绿色环保型清扫车已是大势所趋。在结合国内外现有环保车发展现状和存在不足的基础上,设计了一款太阳能蓄能,电机驱动的智能小车,太阳能可以为小车提高续航能力,小车是集扫地、清理、运输三大功能于一体的,新型多功能、智能化、环保型清扫车。在我们的智能环保车上可以给未来环保车上留下很大的意想空间。随着现代新能源的开发,太阳能逐渐被大家所认可,电子信息化、智能化是现代发展的标志。智能环保车将实现无人作业、零排放零污染这样的目标,这将是一种趋势。此外,智能环保车可以进入险区进行排障、救援、运送物质等,往大的方面想还可以用军事化,如探险、排雷等危险工作。
考察的主要知识范围:单片机及其接口技术、传感技术的应用。
二、总体方案:根据环保车作业特点,按环保车作业功能分成行走、清理、装车运输等三个子功能,采用双步进电机驱动,红外实时壁障来实现车子的行走。通过超声波和红外来区分障碍物与垃圾,以便清理垃圾。该环保车,由机械部分和电路部分组成,机械部分由电机驱动系统、机械手系统、自动扫描光源系统、壁障系统组成,是该设计的核心部分;电路系统由蓄电池及电源模块、步进电机驱动模块、单片机最小系统模块、机械手控制装置、太阳能充电模块、红外和超声波模块组成。
三、系统设计
该环保车行走及工作的动力是由两个步进电机和五个舵机提供。在行走时,步进电机拥有较大的扭矩,这是根据整个车身的重量来设计的,更大的优点是在车身左右扫描垃圾时,保证了所行走的路线固定,不会出现在一个区域里重复扫描的情况,要实现这些是直流电机很难实现的。由五个舵机及一些组合零件组成机械手,舵机型号是MG995,利用单片机输出5路连续可调的0.5—2.5ms的PMW方波信号是五个舵机都可连续可调,13Kg的大扭矩可以支撑整个机械手和完成抓举动作。采用轻质铝合金组合成机械手臂一方面减轻车身重量,另一方面保证了机械手硬度。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

