
介绍:
本文为风洞虚拟飞行试验设计并实现了一套高性能的实时数据采集与控制系统,该系统采用高性能 NI PXI 平台为硬件平台,选择 NI PXI 模块来完风洞虚拟飞行数据的采集和舵机动作的控制,将 RTX(实时扩 展模块)引入 Windows 作为系统软件平台,能够控制飞行器的机动运动过程,同时测量气动/运动参数, 为研究飞行器的高机动运动特性与机理提供了先进的动态试验平台。
应用方案:
根据技术指标和性能要求,本文设计了如图所示的数据采集和控制系统总体方案,完成对虚拟飞行试验组件的数据采集和试验控制。
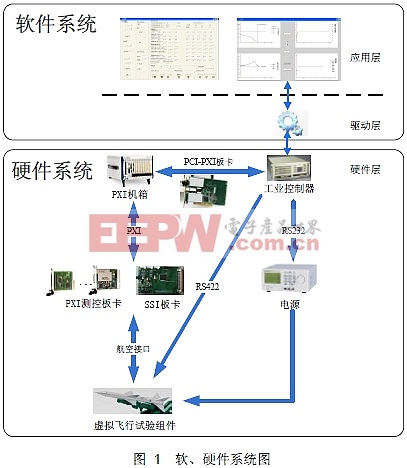
1. 软件系统总体方案
软件系统以 Windows+RTX 方式搭建系统环境,包括应用软件、底层板卡驱动。上层软件与底层软件通过建立共享内存实现进程间通信。
1) 应用程序
应用程序主要用于实现对虚拟飞行试验的流程控制以及曲线显示的功能。本文中,应用程序的设计主要包括电源管理设计、舵机控制管理设计、试验数据管理设计、曲线显示设计四部分。
2) 驱动程序
为了满足实时性的要求,PXI 测控板卡必须工作在 RTX 实时环境下,板卡在 RTX 下的驱动程序要求具备良好的移植性和层次性,同时提供给应用程序一个非常好的接口。另外,根据虚拟飞行试验需求,系统在 RTX 环境下还包括信号编解码程序以及舵机控制算法程序。
2. 硬件系统总体方案
硬件系统包括上位机——工业控制计算机、下位机——PXI 机箱、PXI-PCI 板卡、PXI 测控板卡、电源和显示器。
1)工业控制计算机
为了满足系统系统的控制和采集要求,选择工业控制计算机作为控制核心。控制计算运行 Windows+RTX系统,具体的 RTX 实时性能分析见第三章。
2) PXI 机箱
为了实现系统的稳定性和可靠性,选择高散热、防噪声性能好的 PXI 机箱作为 PXI 测控板卡的运行环境。
3) PXI-PCI 板卡
为了实现工业控制计算机的 PCI 总线和 PXI 机箱的 PXI 总线的桥接工作,系统选择 PXI-PCI 板卡完成了 工业控制计算机对 PXI 系统的远程控制。
4) PXI 测控板卡
为了实现高性能、低成本的运载平台,本系统选用具有 PXI 总线的板卡控制舵机偏转并完成光电编码 器信号、陀螺仪信号、天平信号及舵机反馈信号的采集。具体硬件设计见第四章。
5) 电源
供电电源用于给舵机提供所需电压。
文章全文,回复可见:
——回复可见内容——
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

