
介绍:
本课题要求学生通过学习 NI ELVIS 教学实验室虚拟仪器套件和图形化系统设计软件 LabVIEW,运用控制理论的相关原理设计完成基于 ELVIS 的直流电机位置和速度控制系统。其中,电机的控制系统中应用了经典控制理论的 PID 控制和现代控制理论的模型预测控制。
应用方案:
1. 获取电机模型得出其传递函数:
通过给电机施加一个电压阶跃, 然后通过分析阶跃响应来推导出系统的传递函数。
该 VI 的理论基础是假设电机系统是一个一阶的系统,因此响应从阶跃开始到上升到(Vfinal-Vstart)*0.632+Vstart 的时间为一阶系统的时间常数, Vstart 为电压阶跃前电机转速, Vfinal 为电压阶跃后电机的稳态转速。
一阶系统的放大系数 K 则容易求出,K=(Vfinal-Vstart)/Vol_step; Vol_step 为电机电压的阶跃量,等于阶跃后电机的输入电压减去阶跃前电机的输入电压。
通过编程求出电机模型的传递函数后可以使用不同的控制方法进行电机控制。
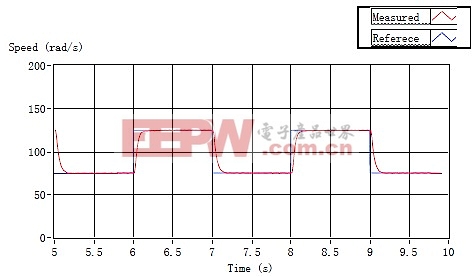
2. 设计实验完成对直流电机的 PID 速度控制
通过数据采集程序将电机 AI#4 通道的模拟信号读取后经转换后成为速度信号经过一个低通滤波器滤波将信号传给 PID.vi。我们给 pid 的设定值为方波信号,速度信号经过 PID 控制转换后输出电压信号,此电压信号传给人物写入控件,电机得到新电压后转速发生变化完成控制。
3. 直流电机位置控制:
获取了电机模型,然后通过有传递函数转化状态空间模型,根据模型控制算法设置正确的 Xf 完成线路的连接,从而成功的进行模型预测控制。由此程序框图可以进一步看出图形化编程工具 LabVIEW 在编写程序时的优势,仅仅几根连线就可以表示可能需要很多代码才能完成的程序设计。
文章全文,回复可见:
——回复可见内容——
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

