
刚开始接触CPLD,我现在用的开发环境是ISE14.2版本的,学习期间问题多多啊,捡其中一两个来向大家请教,请大家多多指导。
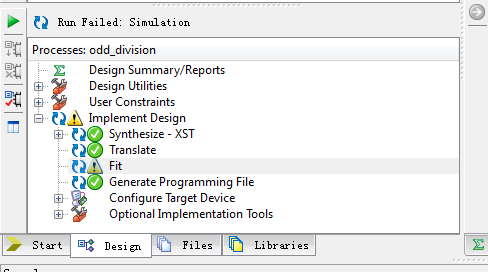
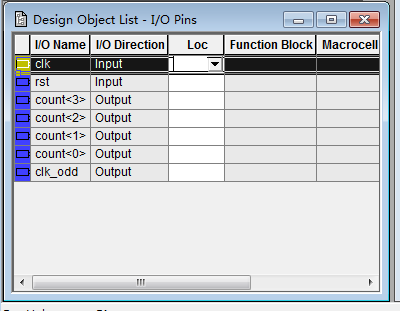
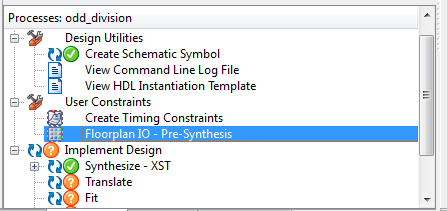
1.如下图,程序没有问题,为什么FIT不成功,CPLD编程在哪一步对管脚进行设置,也就是自己定义的和实际芯片管脚联系起来?
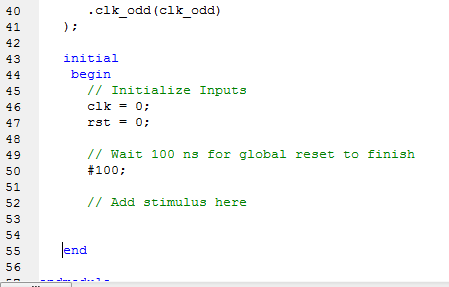
2.如下图,怎么对已有的程序进行仿真验证,用自带的软件怎么编写仿真程序?
这个界面不是绑定ucf的,你可以找个例程的ucf,用文本打开看看
头尾固定,中间部分自己定义修改
#PACE: Start of Constraints generated by PACE
#PACE: Start of PACE I/O Pin Assignments
NET "FPIO2" LOC = "p10" ;
#PACE: Start of PACE Area Constraints
#PACE: Start of PACE Prohibit Constraints
#PACE: End of Constraints generated by PACE
说白了,ucf就是芯片物理管脚和内部分配的关联性
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

