
作者:北京理工大学 孙冠 韩冬 冯丹
指导教师:张幽彤 冬雷
作品简介
摘要
本文介绍了半年多来北京理工大学星际航行者车队队员们在准备Freescale
智能车大赛过程中的工作努力成果。智能车的硬件平台采用带MC9S12XS128处
理器的S12环境,软件平台为CodeWarrior IDE 5.0开发环境,车模采用大赛组委
会统一提供的1:10 的仿真车模。文中介绍了智能小车控制系统的软硬件结构
和开发流程。
整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和
策略优化等多个方面。为了提高智能赛车的行驶速度和可靠性,试验了多套方
案,并进行升级,进行了大量底层和上层测试与调试,最终确定了现有的系统
结构和各项控制参数。
第一章引言
教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全
国大学生数学建模、电子设计、机械设计、结构设计等几大竞赛的基础上,经
研究决定,委托教育部高等学校自动化教学指导分委会主办每年一度的全国大
学生智能汽车竞赛,并成立了由教育部、自动化分教指委、清华大学、飞思卡
尔半导体公司等单位领导及专家组成的“第一届‘飞思卡尔’杯全国大学生智
能汽车邀请赛”组委会。该竞赛是为了提高大学生的动手能力和创新能力而举
办的,具有重大的现实意义。与其它大赛不同的是,这个大赛的综合性很强,
是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感、电子、电气、
计算机和机械等多个学科交叉的科技创意性比赛,这对进一步深化高等工程教
育改革,培养本新意识,培养硕士生从事科学、技术研究能力,培养博士生知
识、技术创新能力具有重要意义。
以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实
践活动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综
合,而结果属性很可能是创造。通过竞赛,参赛的同学们培养了对已学过的基
础与专业理论知识与实验的综合运用的能力;带着背景对象中的各种新问题,
学习控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科新知
识,包括来自不同学科背景大学生的相互学习,逐渐学会了在学科交叉、集成
基础上的综合运用;若是以实用为目的,还必须考虑考虑可靠性、寿命、外观
工业设计、集成科学与非科学,在具体约束条件下融合形成整体的综合运用。
这样的训练是很有意义的。
在智能车的开发过程中,各参赛队伍需要改装竞赛车模,完成智能巡线
小车的制作。在此过程中需要学习嵌入式系统开发环境与在线编程方法、单片
机接口电路设计,自行设计并实现识别引导导线的硬件电路、电机的驱动电路、
车速反馈电路、智能车舵机控制电路以及能使小车在不驶出赛道的前提下可能
快速行驶的控制策略与软件算法。第一届“飞思卡尔”杯全国大学生智能汽车
邀请赛,已于2006 年8 月21 日在清华大学顺利结束。为了使更多的高校、更
多的大学生参与到这一活动中来,第二届“飞思卡尔”杯全国大学生智能汽车
竞赛原则上由全国有自动化专业的理工类高等本科学校约270 余所参赛,每个
参赛学校限2 个队;分五个赛区进行预赛,各分赛区的优胜队参加决赛。第四
届“飞思卡尔”杯全国大学生智能汽车竞赛将参赛规模扩大到每校四个队伍,
比赛的普及性进一步提高。第五届比赛更是加入了全新的磁导航组,增加了比
赛的多样性和精彩程度。
智能车的开发与设计涉及到多个专业领域,对于大学生综合素质的培养,
知识面的拓展和分析问题解决问题的能力的提高很有意义,并且有利于提高大
学生的动手能力、激发创新能力。此外,制作这样一个高性能智能小车的过程,
也是需要同组成员相互协作、紧密配合的过程,在此过程中,团队成员的交流
与合作也显得尤为重要。
本届比赛分为光电、摄像头和磁导航三个赛题组。本文中主要介绍磁导
航赛题组的智能车制作。
1.2 系统方案介绍
磁导航组为本届比赛全新加入的组别,没有成型的技术方案和资料可供
参考,我们根据竞赛秘书处公布的资料和实际实验的结果,采用电感进行路径
检测;算法方面,采用目前在智能车控制方面比较常见的模糊PID 算法,结合
人工调参,达到比较理想的控制效果。
经过分析整个智能车系统,可知系统完成的功能如图2.1所示
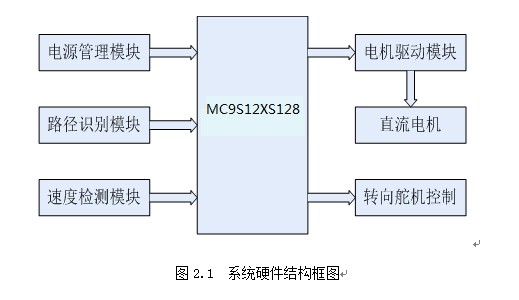
其中MC9S12XS128 是系统的控制核心。它负责接收赛道信息、小车速度等反
馈信息,并对这些信息进行处理,得到合适的控制量来对舵机与驱动电机进行控制。
舵机模块和电机驱动分别用于实现小车转向和驱动。
电源管理模块主要为单片机及路径识别电路、转向舵机、后轮驱动电路三大
部分提供稳定的直流电源。
路径识别模块由传感器、外围电路和S12 的AD 模块组成,其功能是获取前
方赛道的信息,以供S12 作进一步分析处理。
速度检测模块由传感器、外围电路和S12 的脉冲计数模块组成,通过检测赛
车的实时车速为赛车的车速控制提供控制量。
全文请访问:北京理工大学 电磁组 星际航行者技术报告.pdf
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

