
作者:武汉大学 王松 桂初晴 陈武
指导教师:陈正
作品简介
第一章 引言
全国大学生“飞思卡尔”杯智能汽车竞赛是以“立足培养、重在参与、鼓励探索、追求卓越”为宗旨,鼓励创新的一项科技竞赛活动。全国大学生智能车竞赛已经成功举办了五届,比赛规模不断扩大、比赛成绩不断提高。通过比赛,促进了高等学校素质教育,培养了大学生的综合知识运用能力、基本工程实践能力和创新意识,激发了大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神, 为优秀人才的脱颖而出创造了条件。
竞赛要求在规定的汽车模型平台上,使用飞思卡尔半导体公司的16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动模块以及编写相应控制程序,制作完成一个能够自主识别道路的模型汽车。智能汽车竞赛的赛道路面为宽度45cm的面板,两边有宽度为25mm的连续黑线,作为引导线,且赛道中有直道、弯道和坡道参三中路况。赛队员的目标是模型汽车需要按照规则以最短时间完成单圈赛道。
本智能车系统是以飞思卡尔公司生产的 16位微控制器 MC9S12XS256作为核心控制单元,并包括激光传感器及摇头舵机对赛道信息采集与处理、转向舵机控制、光电编码器速度采集、电机转速控制等,最终实现一套能够自主寻迹的智能小车软硬件控制系统。在方案设计的过程中,参阅了很多兄弟院校的往届大赛技术报告,如清华大学、北京科技大学、杭州科技大学等。通过研究探索,最后采取的策略是激光传感器、摇头巡线控制加液晶屏键盘辅助调参。这样不仅可以提高赛车的前瞻性,寻线的灵活性,而且使赛车的稳定性也有所提高。
本技术报告共七章,包括小车系统的总体设计、硬、软件系统组成各部分的分析、系统控制策略的阐述等。其中,第一章为引言,主要介绍了智能汽车研究背景、智能车竞赛的现状与发展以及技术报告的整体框架安排;第二章为智能车总体方案设计,主要包括小车系统模板设计的基本要求和框架结构;第三章为智能车机械结构调整及优化,主要包括智能车各部分机械结构调整的概况;第四章为智能车硬件系统的设计,详细地介绍了小车硬件系统的组成部分,包括:激光传感器、转向舵机、摇头舵机、电机、测速编码器以及 MC9S12XS256 微控制器;第五章为智能车软件控制策略介绍,包括起跑线、十字弯等道路识别以及赛道类型判断和舵机、电机控制算法;第六章介绍了在智能车开发、制作、安装、调试工具;第七章为智能车主要技术参数说明。
第二章 智能车总体设计方案
2.1 章节概述
本章主要介绍了本组光电车的总体设计方案和设计思路,在以后的章节里,将对整个系统从机械结构、硬件电路、控制算法三个方面进行更为细致的分析介绍。
2.2 系统总体方案设计
本组光电车使用飞思卡尔MC9S12XS256作为核心控制单元,使用双排激光传感器,且双排激光传感器皆为寻双边黑线,大前瞻进行摇头巡线控制,小前瞻对车在上下坡的过程中进行控制,并且检测起跑线。此外,使用了陀螺仪进行坡道检测,使用了光电编码器对小车速度进行检测。并且增加了液晶屏和键盘以及拨码开关,以便更方便的查看小车数据,修改小车参数,以及修改整体策略。根据采集到的黑线信息以及小车速度信息,对小车的转向以及速度进行控制,从而实现小车的循迹,整体结构框图如图2.1所示:
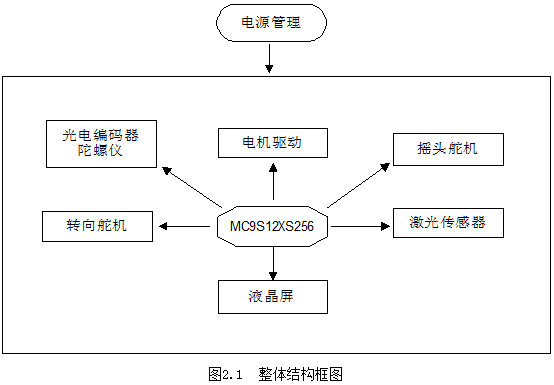
智能车系统从硬件上来分为八大模块,分别为电源管理、激光传感器模块、转向舵机、摇头舵机、电机驱动、光电编码器及陀螺仪、液晶屏、单片机模块。
全文请访问:光电组-武汉大学-有时想起队技术报告.doc。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

