
作者:滨州学院 高光耀 高运生 胡文财
指导教师:袁伟
作品简介
开发背景:
我国是一个地震等自然灾害多发国家,尤其是近几年我国地震等灾害事件愈发频繁。地震等自然灾害对我国人民群众生命财产造成巨大损害,个人觉得在目前科技还不能够预测地震这种自然灾害事件发生,灾后救援就显得尤为重要。由于地震破坏力巨大,对于救援通信极为重要的信号塔往往已经毁坏,救援工作受到极大的阻力。基于此,本团队开发出基于四旋翼的灾后GSM信号临时组网系统。
结构说明:
本系统是基于利用GPS精确定位并且能够实现自动驾驶的四旋翼为平台,搭载能够扩大基站信号的无线网桥设备。四旋翼平台包括自动驾
驶系统、动力系统、信息交流系统、图像采集传输系统,其中自动驾驶系统是四旋翼平台的技术核心,它主宰整个平台的自我稳定的保持、精确到达灾区以及精确降落等任务。无线网桥系统为5.8GHz频段的802.11a网桥,多个无线网桥链式链接能够很好地扩大基站信号以及远距离传输基站信号。
功能与说明:
本系统旨在在基站设施毁坏的震后灾区建立临时的GSM信号的组网以及灾情勘测。本系统中四旋翼平台实质是一台能够自我定位并且能够自动飞行的无人机系统。其飞机控制器核心以STC15为主控制芯片,同时搭载三轴陀螺仪、三轴加速度计、电磁指南针以及地磁传感器、气压传感器等传感器以及地磁传感器、气压传感器等模块,飞行控制模块与无线路由模块进行串口通讯,利用其串口与无线网络建立的数据交换信道,接收来自无线局域网络终端的飞行指令并能完成指令。同时多个网桥链式布局能够进行远距离信号传输,形成局部的基站信号系统。同时飞行器所带有的摄像头通过图传以及3DR数传能够实时回传灾区灾情,适用于灾情侦测。
平台选型说明
IAP15F2K61S2系列单片机是STC生产的单时钟/机器周期(1T)的单片机,是高速/高可靠/低功耗/超强抗干扰的新一代8051单片机,采用STC第八代加密技术,加密性超强,指令代码完全兼容传统8051,但速度快8-12倍。内部集成高精度R/C时钟,±1%温飘,常温下温飘5‰, 5MHz~35MHz宽范围可设置,可彻底省掉外部昂贵的晶振。3路PWM/PCA,8路高速10位A/D转换(30万次/秒),针对电机控制,强干扰场合。

设计说明
(1)、运动的原理。
四旋翼平台作为本系统的结构和技术主体,除了具有搭载无线网桥设备的功能同时还要完成航拍侦测并且实现图像实时传输。四旋翼拥有极为良好的飞行特质。四旋翼飞行器的工作方式是通过改变流过电机的电流的大小来改变电机输出功率的,进而可以使四旋翼飞行器处于空间中的任意一点,由于四旋翼飞行器是通过改变螺旋桨转速变化来改变升力大小,它需要一种保持稳定的控制方法,主要是因为其动力不稳定,因此四旋翼飞行器更适于静态飞行和动态飞行[9]。
四旋翼飞行器能够在小范围内垂直起降,其障碍物密集环境下的控制容易,以及飞行器可以保持特定姿势,起飞降落更加平稳,四旋翼飞行器和其他航空器相比,特点有以下几点:它的结构简单,可以做得很小很轻便,只需通过调控螺旋桨的输出功率即可实现俯仰、偏航、滚转及各种姿态的改变,机动能力更加灵活具有较高的操控性能。四旋翼飞行器结构如图1所示。
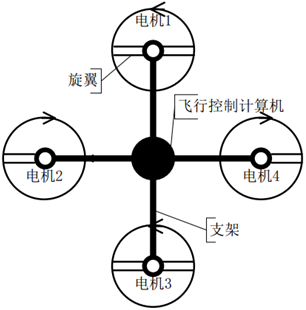
图1四旋翼飞行器的结构形式
(2)飞行控制系统
飞行控制系统是四旋翼移动平台的核心技术部分。该飞行控制系统包括两个部分:飞行导航板和飞行姿态控制板。其中飞行导航板以atmega2560为主控制芯片,同时搭载三轴陀螺仪、三轴加速度计和负责四旋翼的自我定位以及对目标坐标的定位。该模块是以电磁指南针等传感器,飞行导航模块与无线路由模块进行串口通讯,利用其串口与无线网络建立的数据交换信道,接收自无线局域网络终端的飞行指令。飞行姿态控制板主要负责控制四旋翼的姿态稳定,消除外界不良干扰,以及四旋翼运动命令解析下达。以STC系列IAP15F2K61S2单片机为主要控制芯片的飞行姿态控制板,搭载地磁传感器、气压传感器、超声波测距模块。与飞行导航模块通讯,通过读取导航板的指令信号
再综合自身的信号来完成飞行要求。飞行姿态控制模块与飞行导航模块相对独立,飞行姿态控制板保持悬停时的平稳,飞行导航板控制飞行,这样即使出现误操作也会使机身具有很高的稳定性。
(3)无线路由模块。
本模块是符合wifi 无线网络标准的嵌入式模块,内置无线网络协议IEEE802.11 协议栈以及TCP/IP 协议栈,能够实现用户串口或TTL 电平数据到无线网络之间的转换[10]。支持通过指定通道号的方式进行快速联网,连入无线网时,先对网络信道进行一次全面搜寻,来搜索准备连接的目的AP 创建的网络,根据802.11 协议规定,不同的无线网络可以具有相同的网络名称,但必须对应一个唯一的BSSID 地址,通过BSSID地址绑定的方式,可以防止STA 接入到非法的网络,以加强网络安全实现数据安全传输。
通过配置无线路由模块的文件、硬件及相关的驱动部分,将指令的传输方式嵌入其中,让其成为一个无线站点,实时的与pc局域网络终端行数据的交换。利用其TTL串口与单片机建立数据交换信道,将模块的TTL 电平接入设备单片机,实现设备通过无线联网,从而可以在无线网络终端通过自定义摇杆和计算机键盘自定义的按键遥控四旋翼飞行器的飞行。在远距离时,给路由器配置无线3G网卡联入网络机的控制就不在受空间的限制,可以实现超视距的监控。或者通过无线数传进行远距离的数据传输。无线路由的设计如图2所示。
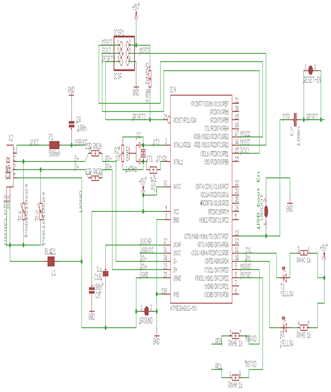
图2、无线路由模块设计
4)USB摄像头
摄像头有模拟摄像和数字摄像头之分,模拟摄像头可以将视频采集设产生的模拟视频信号转换成数字信号,然后在计算机中存储,模拟摄像头捕捉到的视频信号必须经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以转换到计算机上运用,数字摄像头是将捕捉的数据,用串口或者并口或者USB接口与计算机相连。本模块所选用的是USB摄像头,本摄像头可支持1300万象素的视频拍摄,并且具有自动对焦功能,利于高空拍摄清晰的视频图像。
总之,整体的四旋翼移动平台的系统流程图见图3。
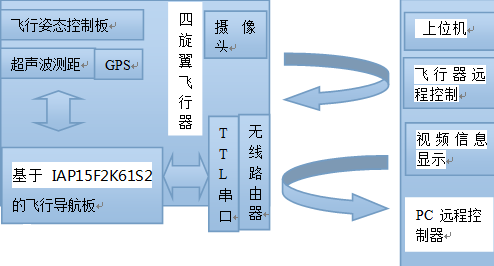
图3
1、无线网桥部分
无线网桥广泛应用于临时组网系统中,同时它还可以起到放大
基站通信信号的功能。
2、其工作方式有如下几种。
(1)、点对点型(PTP),即“直接传输”
无线网桥设备可用来连接分别位于不同建筑物中两个固定的网络。它们一般由一对桥接器和一对天线组成。两个天线必须相对定向放置,室外的天线与室内的桥接器之间用电缆相连,而桥接器与网络之间则是物理连接。
(2)、中继方式,即“间接传输”
BC两点之间不可视,但两者之间可以通过一座A楼间接可视。可采用中继方式,A楼作为中继点。BC各放置网桥,定向天线。
(3)、点对多点传输
由于无线网桥往往由于构建网络时的特殊要求,很难就近找到供电。因此,具有PoE(以太网供电)能力就非常重要,如可以支持802.3af国际标准的以太网供电,可以通过5类线为网桥提供12V的直流电源。一般网桥都可以通过Web方式来进行管理,或者通过SNMP方式管理。
3、通信信号扩大作用。在某种意义上,本类工作方式可以归纳为(3)。
总之,考虑到震后灾区实际应用的可能性,本系统采用扩大基站通信信号作用。
先进性以及创新性:
1、本系统是第一次提出使用四旋翼搭载网桥模块实现震后灾区通信信号的建立。使以四旋翼为代表航模的应用进入另一个广阔的范围。
2、本系统中以四旋翼为移动平台,与其配套使用的PC控制地面站软件,四旋翼能够完成自主飞行、自主定位、自主确定飞行航线以及自动返回等高级功能。这些功能的实现使飞行器进入灾区并精确降落变为可能。
3、本系统中搭载自动释放网桥模块。此模块能够检测飞行器离地面高度,当达到安全高度时,自动释放网桥模块,飞行器自动返航。
4、利用多个网桥链式连接,形成局部无线网络与外界通信。
5、四旋翼同时搭载的摄像头能够实时传输图像信号,能够及时观测到灾区灾情以及被困人员,使得救援工作更能精确精准有效率,尽最大可能拯救人民生命财产。
实用性:
1、适用于地震灾区的灾情救援,尽最大可能拯救人民生命财产,使灾害损失降低到最小。
2、飞行器的机动特性以及悬空特性适用于临时组网的需要。
同时飞行器可以进行实时的灾情观察。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

