
作者:武汉大学珞珈学院 王一名 李勇康 向功涛
指导教师:胡婧 徐嘉
作品简介
开发背景:随着现代工业技术的发展,机器人开始广泛应用于各领域中,机器人行走步态的稳定性成为急需解决的颈瓶问题,尤其是双足机器人。
结构说明:将MCU模块一端引脚与GY85三轴加速度传感器连接,另一端与机器人主控板连接,模块通过传感器获取机器人的运动状况,MCU模块进行运算处理对主控板的步态进行调节补偿然后再发到机器人相应关节电机。
功能使用说明:三轴加速度传感器置于机器人质心,通过杜邦线将传感器,主控板与MCU模块已定义的固定端口引脚连接好即可。
作品特色:应用于有很大发展前景的双足机器人,效果较好,简单易用。
平台选型说明
Rigol赛嵌入式竞赛板(处理模块---MCU模块),三轴加速度传感器
设计说明
目前机器人已开始广泛应用,而双足机器人更是如此。对于机器人,行走的稳定性控制是一个重要的急需解决的难题。传统的步态是离线调节后再供给主板调用,这种步态可控性弱,灵活性较差,地面的路线环境适应性差,另外机器人步态之间影响大,前一个步态造成的运动结果—加速度状态等会干扰到下一个步态的运行。由此造成机器人行走不稳定,易摔倒以致机器人受损。本设计意在设计一个机器人步态稳定控制系统,对传统的离线步态进行改进。
原理图:
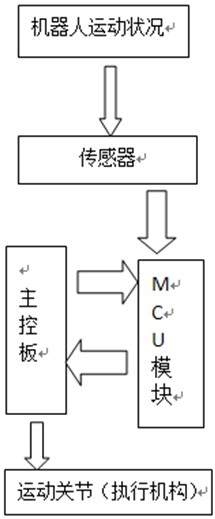
设计原理:本控制系统首先通过传感器获取机器人的运动参数,将其传递给MCU模块,模块根据参数,同时结合从主控板传来的离线步态,确定步态数据中每一帧的补偿量,加到原步态,生成新的较适合的步态返回给主控板,经主控板端口发送到机器人的执行机构。这样,结合了当前机器人运动状况的步态能使机器人行走得更加稳定,具有更好的路面适应性。
模块搭接图:
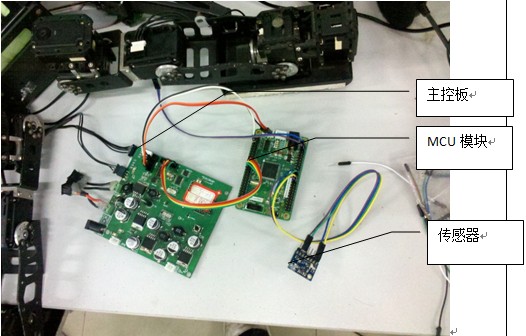
设计方案:做这样一个小型系统,要有前提:就是双足仿人机器人,于是我们选择了已有的小型足球机器人作为开发基础。然后是机器人的状态获取,需要用到检测装置----传感器,故选用了三轴加速度传感器以实时获取机器人的运动状况,(因为主要是机器人的偏向加速度对机器人下一步态造成较大影响),同时三轴加速度传感器需要安装于机器人的质心或其附近以保证获取的值能比较真实的反映机器人的运动状况。然后选定处理模块---MCU模块,要先确定使用的引脚—来自主控板的引脚和来自传感器的引脚以及发送给主控板的引脚,编写处理程序,根据一定的算法,利用传感器的参数信息对步态数据补偿,比如如果机器人有明显向右的加速度,而主控板传来的步态是直走,此时就需要将右脚向右转动一定角度(生成补偿角),利用落地的反作用力抵消偏右的加速度,使得机器人能稳定的向前直走,而不发生晃倒。对于足球机器人来说,射门时的动作是比较关键的,由于动作缓慢需要保证机器人的重心落在脚底板与地面的接触面积内,此时机器人对晃动的控制就更为重要了。
射门动作控制调试:

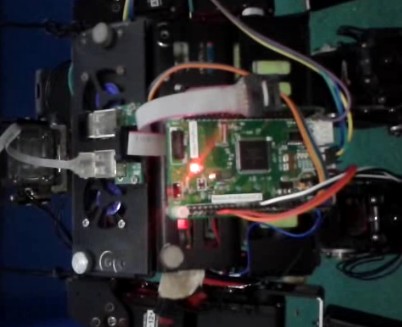
考虑到接线的方便,将MCU模块接于机器人的外部,通过定义好的端口与传感器,主控板连接通信。这样就构成了机器人的步态稳定控制系统,控制机器人能稳定的行走。
系统搭接安装图:
当然还可以在机器人的脚底装上压力传感器,将它和MCU模块连上,通过获取更多的机器人运动信息进行调整能使机器人对路面具有更好的适应能力。但鉴于时间和经费限制,就没做成。
功能成果:通过前期的准备及控制算法代码实现以及一系列的调试后,机器人步态稳定系统成功且效果显著的应用到了足球机器人上,实现了机器人步态的稳定控制。
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13526
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

