
上下坡的扭矩得够大,手里这个电机扭矩感觉有点小了,能不能上下坡得尝试下。

1、项目概述
两轮自平衡小车,涉及到传感器的驱动,数据的处理,角度的计算,电机的控制等,内容比较丰富,不失为学习单片机和控制的一条好途径。楼主13年参加大学生电子设计竞赛的时候,做的是倒立摆,这玩意跟自平衡小车也有几分相似,都是通过控制电机,来保持一个平衡(小车 or 摆杆)。说起来跟四轴飞行器其实也差不多。。。近来没事,搞搞这自平衡小车,亲手体会下这小车和倒立摆的区别,嘿嘿。
主要定位是玩一玩,那就要看看手头有没有可以利用的资源,该买的就买啦。有兴趣的旁友们就一起来搞吧,别让楼主一个人太孤单啦
下面开始新鲜热乎的直播啦~
2、项目方案
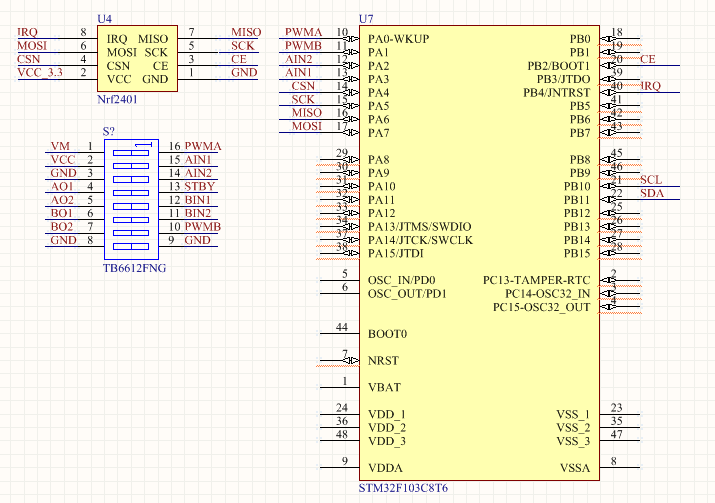
选择较为传统的方案,主控STM32,传感器Mpu6050,采用四元数互补滤波进行姿态解算(求角度),国产直流减速电机,电机驱动用TB6612FNG,主要是体积比L298N较小,效率要高。电池用3S航模电池(手里就有这电池,格式的,不用另外买啦)。
控制方式通过串级PID进行控制,预计先加上角度环和角速度环。PID调试的时候,用Nrf2401来进行实时参数整定,同时也作为遥控功能。预计有时间就加上蓝牙,可能可以用手机app控制,还有一个体感遥控,这个看情况是否加上,嘿嘿。基本思路跟做四轴飞行器也差不多,准备开搞~
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

