
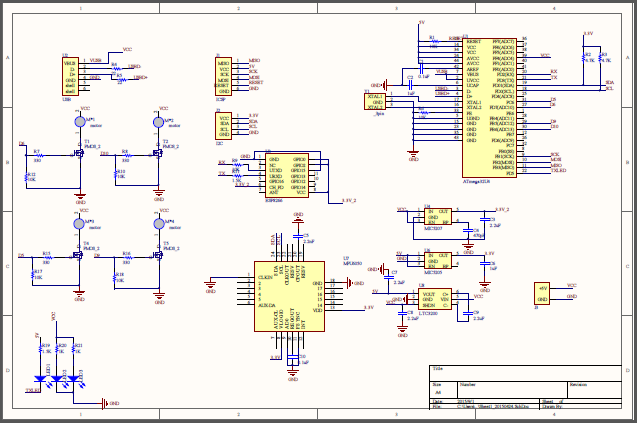
 先上原理图
先上原理图原理图.png
使用AD09绘制,有些原理图库可以自己画,有些网上下载即可,又方便有节约时间。
主控芯片:ATMEGA32U4-MU 芯片,好处可以直接使用USB下载程序和调试。

32u4.jpg
芯片 微控制器 8位 ATMEGA 16MHZ VQFN-44
控制器系列: ATmega
程序内存大小: 32KB
存储器容量, RAM: 2.5KB
CPU速度: 16MHz
输入/输出数: 26
MCU 封装类型: VQFN
针脚数: 44
嵌入式接口类型: SPI, USART
电源电压最小值: 2.7V
电源电压最大值: 5.5V
名称:MPU-6050(三轴陀螺仪 + 三轴加速度)

使用芯片:MPU-6050
供电电源:3-5v(内部低压差稳压)
通信方式:标准IIC通信协议
芯片内置16bit AD转换器,16位数据输出
陀螺仪范围:±250 500 1000 2000 °/s
加速度范围:±2±4±8±16g
通讯方式:WIFI,使用ESP8266,但是需要设置一下波特率115200,可以使用:ESP8266Flasher,QQ群里也有下载(WIFI微型四轴 368707806)
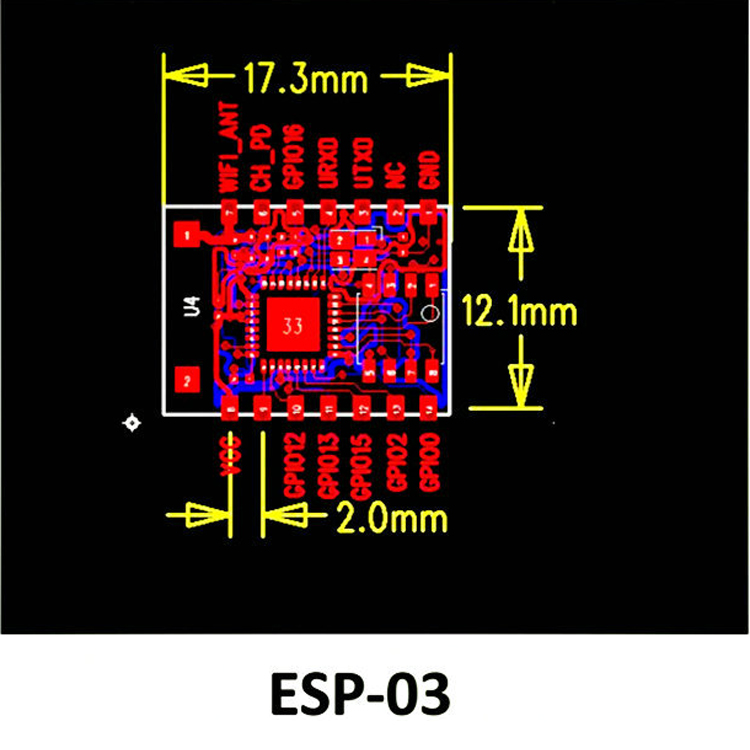
串口通讯WIFI 无线模块
•802.11 b/g/n
•WiFi Direct (P2P)、soft-AP
•集成 TCP/IP 协议栈
•集成 TR 开关、 balun、LNA、 PA 和匹配网络
•集成PLL、稳压器、DCXO 和电源管理单元
•802.11b模式下 +19.5dBm 的输出功率
•小于 10uA 的断电泄露电流
•集成低功耗 32 位 CPU,可以兼作应用处理器
•SDIO 1.1/2.0、 SPI、UART 接口
•STBC、 1×1 MIMO、2×1 MIMO
•A-MPDU & A-MSDU 聚合 & 0.4ms 的保护间隔
•2ms 之内唤醒并传递数据包
•待机状态消耗功率少于 1.0mW (DTIM3)
•SDIO 2.0、SPI、UART 接口
•32-pin QFN 封装
•集成 RF 开关、 balun、LNA、 24 dBm PA 、DCXO 和 电源管理单元(PMU)
•集成 RISC 处理器、片上存储器和外部存储器接口
•集成 MAC/基带处理器
•高品质的服务管理
•高保真音频应用所需的 I2S 接口
•所有内部供电均包含片上低压差线性稳压器
•专有的无杂散时钟生成架构
•集成 WEP、 TKIP、AES 和 WAPI 引擎
然后绘制相应的PCB,
首先用CAD绘制PCB外形图
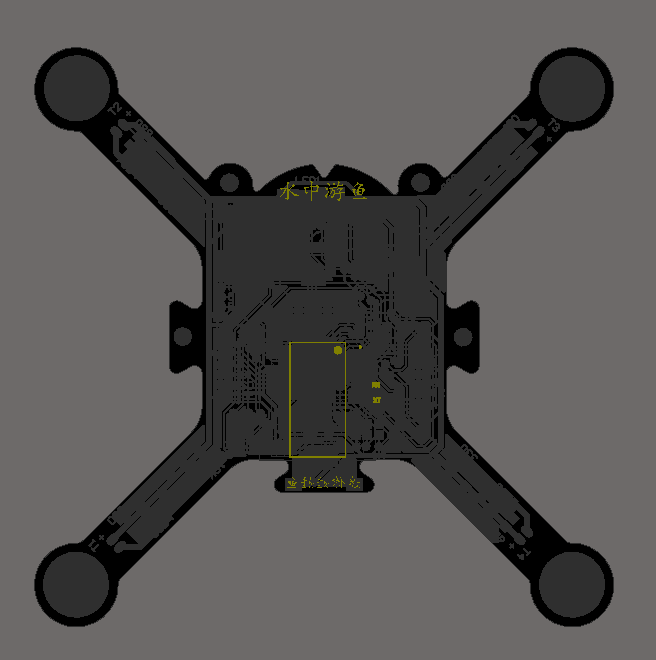 然后根据原理图上的元器件绘制相应的封装库,很多网上都有自己可以下。
然后根据原理图上的元器件绘制相应的封装库,很多网上都有自己可以下。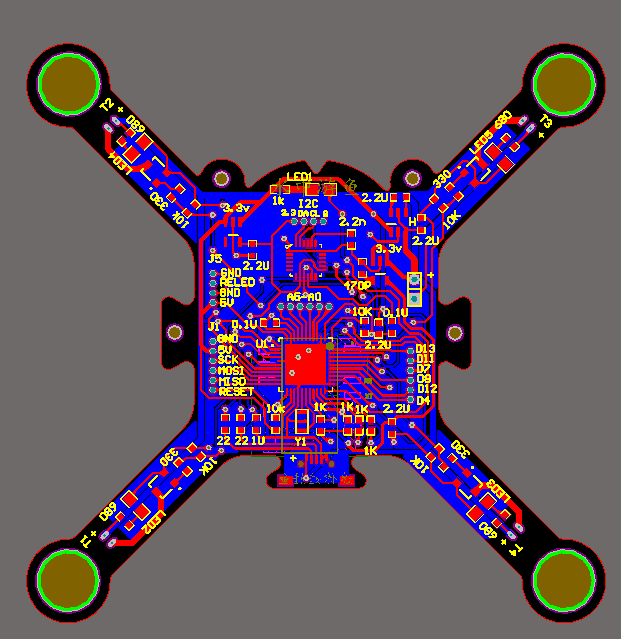 绘制PCB图需要注意的地方:
绘制PCB图需要注意的地方:项目加工能力
板材类型 FR-4
最大尺寸 500mm X1100mm
外形尺寸精度 ± 0.2mm
板厚范围 0.40mm--2.4mm
板厚公差 ( t ≥ 0.8mm) ± 10%
板厚公差 ( t < 0.8mm) ± 10%
介质厚度 0.075mm--5.00mm
最小线宽 6mil
最小间距 6mil
外层铜厚 35um
内层铜厚 17um--100um
钻孔孔径 ( 机械钻 ) 0.3mm--6.35mm
成孔孔径 ( 机械钻 ) 0.3mm--6.30mm
孔径公差 ( 机械钻 ) 0.08mm
孔径公差 ( 机械钻 ) 0.09mm
板厚孔径比 8:1
阻焊类型 感光油墨
最小阻焊桥宽0.1mm
然后注意打样,开始最好就打样10片就行,再多就浪费了,万一测试不成功,送回来后焊接测试飞行
 焊接的话也要注意一些东西:
焊接的话也要注意一些东西:首先来张全部焊接一个点的PCB图
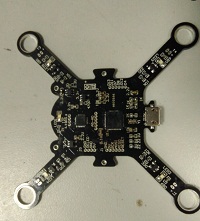 当然这是焊接贴片的必须工具,镊子烙铁等,最好带风枪的那种
当然这是焊接贴片的必须工具,镊子烙铁等,最好带风枪的那种先用烙铁加热焊点,上点锡
然后夹个贴片马上过去
等贴片固定后焊接另外一边!
焊接IC了,先在PCB上固定贴片IC的一个脚
然后大规模全部堆满脚!成了这个样子
然后找跟细铜丝和松香 象拉丝苹果
放到IC脚上!用铜丝吸锡
最后用酒精清洗(用棉签)
你会发现松香很块就会融化而不见!
完成后的样子
 接下来就是考程序了
接下来就是考程序了这次先这么多,下次再接下来讲解程序步奏。
第二季
水中游鱼WIFI版四轴使用说明(更详细的可以加入群470238296,共享中下载)
烧录飞控固件
飞控板出厂时烧录了X 模式的四轴飞控,并且各参数已调到比较合适飞行的数
值。
使用Arduino 1.5.2 的开发环境,通过板子的USB 接口烧录飞控固件。
注意: 确保使用的Arduino 开发环境版本为1.5.2, 或者群里共享文件下载1.5.2
版本软件,这样才能顺利编译。
1、安装Arduino 1.5.2 的开发环境;
Arduino 1.5.2 的开发环境下载地址:
http://downloads.arduino.cc/arduino-1.5.2-windows.exe
或者http://swimfish.taobao.com
2、 通过USB, 将水中游鱼飞控板连接到电脑, 等5 秒左右让电脑识别飞控板的USB
串口。
3、打开飞控代码文件夹, 然后用鼠标双击SWIMFISH.ino 这个文件。
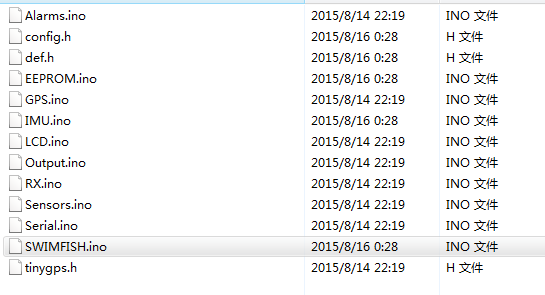
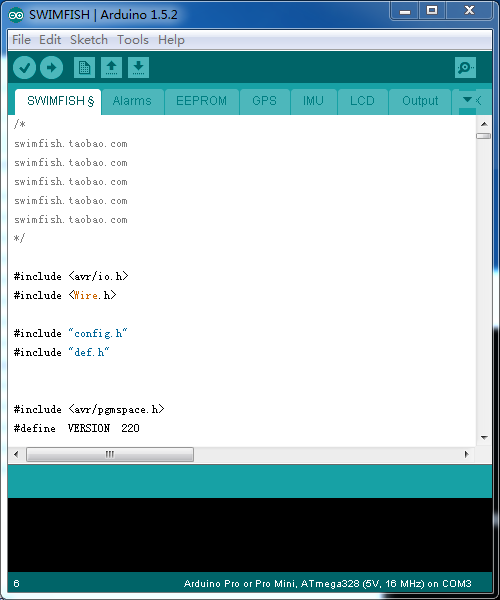
4、 双击SWIMFISH.ino 后, Arduino 开发环境会自动加载所有的飞控代码文件。
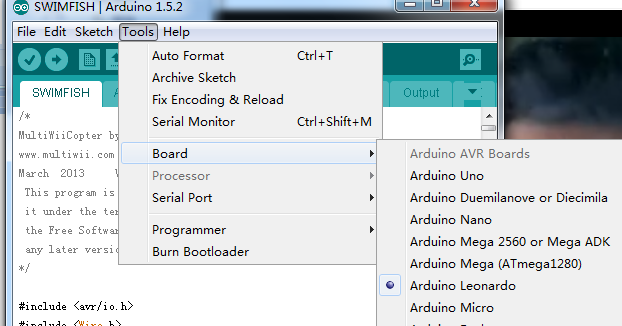
5、 在Arduino 开发环境中, 选择中菜单 “工具” --> “板” --> “Arduino Leonardo” ,
设置板子的类型。
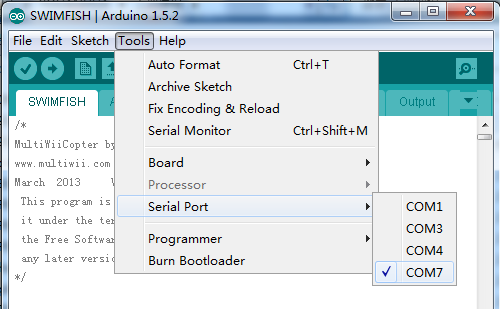
6、在Arduino 开发环境中,在菜单“工具”-->“端口”中选择飞控板子对应的
串口,本例是COM7(Arduino Leonardo)。
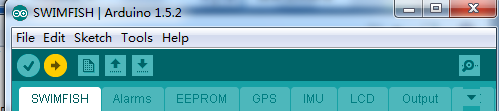
7、按上传按钮进行上传,等待固件上传完。
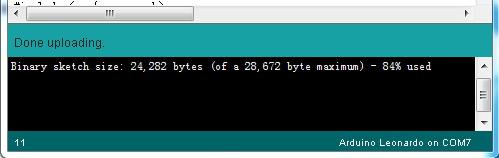
8、顺利上传后,会显示Done uploading,没有红色提示为正确上传,否则存在
问题需重新上传或者修改代码, 也可能是前面几步不正确需重新确认是否正确接
线,是否选择好COM口。
 飞控配置软件的使用
飞控配置软件的使用1、打开配置程序目录
如果你的电脑操作系统是64 位的Windows, 那么打开application.windows64 目
录,如果是32 为的Windows,那么打开application.windows32 目录。
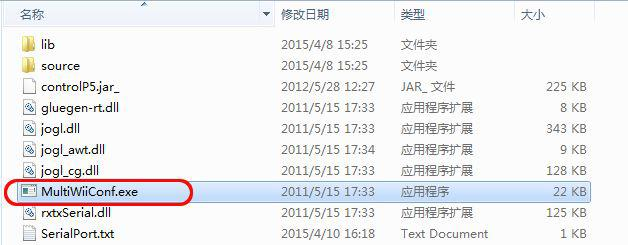
2、双击MultiWiiConf.exe 文件,打开配置程序。
3、在配置程序左侧单击选中板子对应的串口,本例中是COM7。

4、然后点击“START”按钮开始让配置程序和飞控板通信,配置程序功能解析如
下。

这一季先到这,未完待续。。。。。。
送大家一个小贴画
小四轴贴画
U$O[@V58XXGC@T9@)O.png")
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

