
学习了一年多的STM32以后,最近转会到Linux的硬件开发学习,进入到深入的嵌入式学习,进行Linux的硬件开发,必不可少的就是硬件平台,恰逢赶上论坛的DragonBoardTM410c开发板的试用活动,所以打算申请一块板卡开始进行Linux的学习,现在还在学习关于Linux的基础知识,我觉得有开发时间的限制,可以让我感觉到有压力,然后就可以更高效的进行学习。
过往项目经验:因为还是学生之前也没有进行过类似的板卡申请活动,所以项目经验是参加了两次大学生的物联网的比赛,也是这两次比赛让我对电子产生了浓厚的兴趣,两次比赛分别是全国高校物联网应用创新大赛、“博创杯”全国大学生嵌入式物联网设计大赛。下面简要的介绍项目的内容。
高校物联网应用创新大赛
项目名称:汽车智能酒驾控制器
设计目的:近年来我国在交通相关法律方面进行了修改,加强了交通管理力度,明确规定,禁止酒驾行为,酒驾为违法行为。对酒驾行为很是关注。因此这个项目的想法就这样产生了。
功能概述:主控核心采用STM32单片机,因为没有真实的汽车,所以项目采用驱动模型车的方式来取代真车。汽车智能酒驾控制器共有三种模式,1. 驾驶员无饮酒时的自由行驶模式 2. 低量酒精浓度下的限速模式 3. 酒精超标的限制和强制启动模式。
整体流程:系统上电后先进行三十秒的酒精检测,传感器采用MQ-3酒精传感器。此时小车是不能行驶的。检测完毕后会进行对酒精浓度的一个区间划分,判断驾驶员的饮酒量,进行三种模式的判断。酒精浓度很低时,小车可以自由行驶没有任何的速度限制。假定酒精浓度高于一定程度,并且尚未达到国家规定限制时,则进行智能限速模式,根据一定的算法(算法比较麻烦便不在此赘述),计算出一个推荐行驶速度,并设置一个最大的速度,进行速度限制,保障小车的安全行驶。若酒精浓度超标,则将小车锁死,无法行驶,若是遇到驾驶室中未饮酒但拉了饮酒人士的情况则可以按强制启动按钮,使小车可以正常行驶,但是此时GPS会进行定位,并通过3G模块将地址信息发送到上位机以模拟交通部门的监管。在小车行驶期间均会进行酒精的检测,以实现模式之间的自切换。
以下是项目的一些图片:
“博创杯”全国大学生嵌入式物联网设计大赛
项目名称:光学识别自动灭火机器人
设计目的:根据资料表明,我国平均每年因火灾事故死亡人数达2000多人,平均损失近200亿元,而不能及时扑灭小火源是造成重大人员伤亡的主要原因,因此,及时扑灭小火源减少火灾事故发生的主要方法之一。要想做到减小甚至杜绝火灾发生,及时扑灭小火源以把大火灾扼杀在摇篮中,并且在火势大、消防员人员无法进入时可及时出动该消防机器人遥控和自动综合灭火,因此我们团队研发了这款光学识别自动灭火机器人。
功能概述:本次设计的目的是设计一个灭火机器人可以在救灾现场的废墟中发现找到微小火源并将其扑灭。本次设计的主控芯片有STM32F746进行图像处理与火源识别和LPC11U37做底盘驱动和主要执行模块。
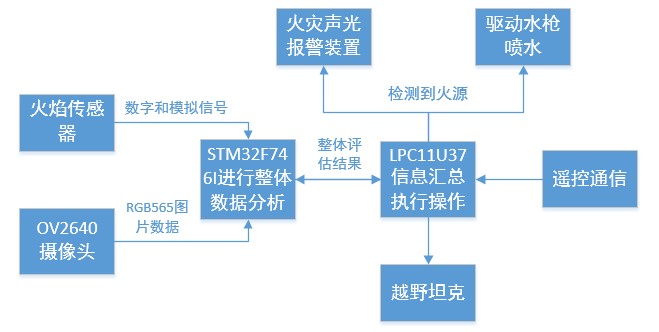
整体功能框图
整个系统流程图如上图所示,灭火机器人通过OV2640摄像头对图片进行采样,然后将捕获到的图片传到STM32F746芯片的RAM中,进行数字信号处理和图像处理,OV2640摄像头图像处理和火焰传感器协同探测火源存在性和方位,大大减小了出错率,提高了检测精度,若探测到有火源,STM32F746会将火焰强度、大致方位等信息报告给LPC11U37处理芯片,主控板控制火灾报警装置响应报警,并驱动水枪自动灭火,达到自动检测火源自动灭火的目的。
这个系统最核心同时也是最难做的就是图像处理部分,图像处理部分算法实现介绍如下:
STM32F746通过DCMI接口与OV2640图像传感器连接,用于获取火灾现场实时图像,数据通过RGB565格式传输至单片机的内部RAM中。本课题采用定时器,考虑到数据处理的时间问题,定时器的周期为200ms,即单片机每个200ms获取一次图像。图像数据首先经过高斯滤波器进行图像去噪处理,然后分两支进行特征提取。一支进行RGB565转YCrCb处理,在色度空间对图像进行火焰的特征提取;另一支采用Sobel边沿检测算法提取CFR(Candidate Fire Region)的边沿,并计算CFR的质心坐标xc和xy和面积a,得到3个几何特征量。在色度域内计算Cb和Cr的均值mb、mr和标准差sb、sr。考虑到单片机内部资源以及实时性的要求,本课题采用逻辑回归进行火焰识别,并基于MLE(Maximum Likelihood Estimation)规则求解线性参数。
同时为了减小类似火焰特征的误操作,本课题采用时间平均模式识别输出结果进行噪声去除操作。假定t时刻的模式识别输出的概率为![]() ,则此时刻的时间平滑输出结果为:
,则此时刻的时间平滑输出结果为:

其中K为前K个图像。
模式训练的数据库选择NIST和VisiFire数据库,NIST提供了室内的11段不同分辨率的火焰视频。VisiFire提供了13个火焰视频和3个加火焰视频。
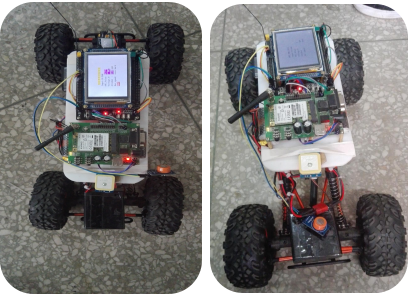
项目实物图:
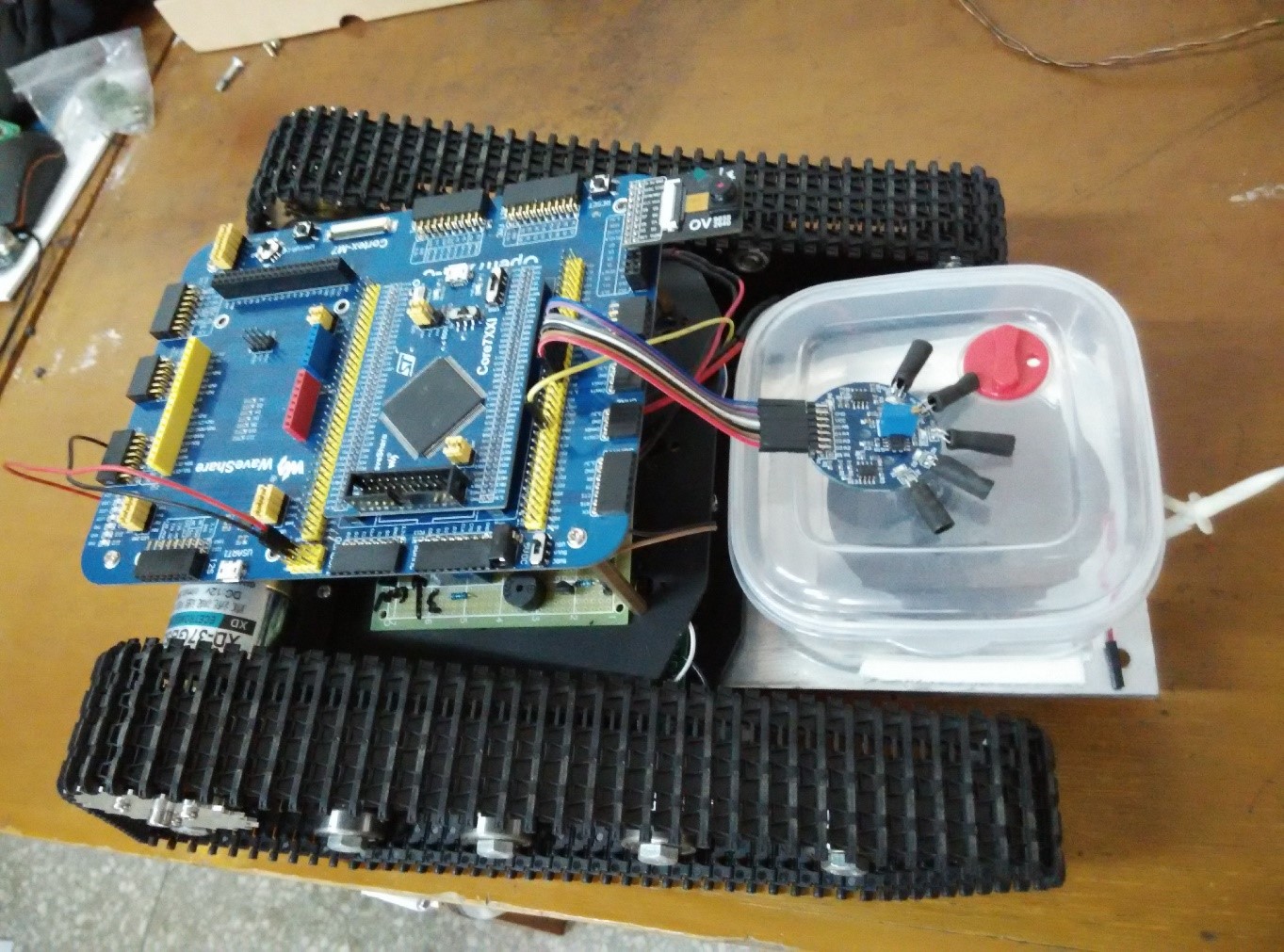
项目整体图
申请理由:在进行了STM32的学习之后,转入Linux嵌入式硬件的学习,亟需一个开发平台做支持,进行后续的学习,同时也想完善,以上的第二个项目,因此申请此开发平台。
预计开发方案:
项目名称:Linux平台下的火焰识别
我的预计开发方案是完善上面的第二个项目(光学识别自动灭火机器人),因为原来的项目图像处理部分的核心为STM32F746,虽然其工作频率为216MHz,相比于原来的STM32F103性能是强大了不少,但是图像处理对于它来说还是比较繁重的工作,所以该项目在图像处理方面并没有达到预期的目的。但这对于Dragon Board 410c来说应该是小事一桩,1.2GHz的高频工作频率,PC级的图形处理能力,在显示方面也可以做的更加优秀,并且板卡支持13MP拍照,支持小波降噪,JPEG解码和其他硬件级的后期处理技术,对于这个项目也是很好的支持。所以想用此平台完善该项目。不过考虑到现在在实习阶段,没有充裕的时间搭完整个系统,初步决定完成对板卡上的资源学习,完成图像处理算法的移植。
申请人:不会游泳的鲨鱼
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

