
整改方案(EMC)
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。下面是我司对机器人辐射整改的报告。

二.头部电机的整改方案
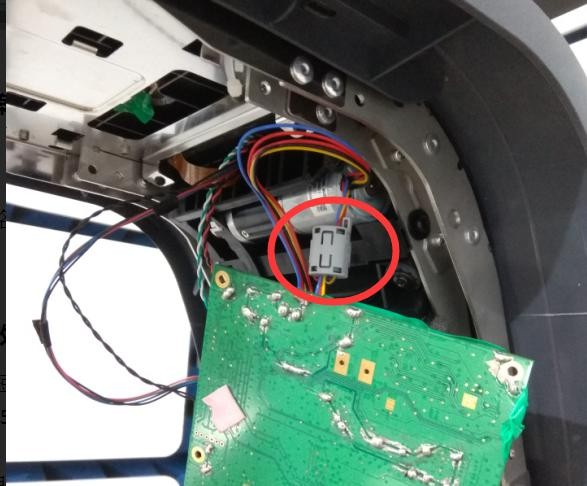
1. 头部电机 Moto 的 UVW 3 条线加磁环绕 2 圈 。磁环规格: 芯通康XTK- V18010
三、底部轮子和主板整改。
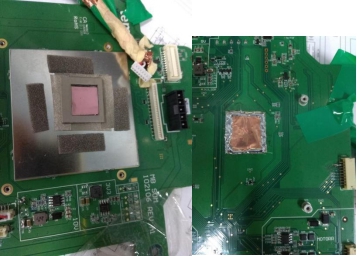
4.主板屏蔽罩贴导电布,可以定做屏蔽罩和导电泡棉

1. 马达线分别加一个磁环。磁环规格: 芯通康XTK-V18003

8.底部 3D 摄像头,端口加共模电感、磁珠。
四.底部 3D 摄像头和 Head card 整改
2. 底部 3D 摄像头加屏蔽线,两端接地。
七.FPC 线、连接线和金属架构整改方案
1. Head card 多加两个接地螺丝孔或者增加导电泡棉

所有共模电感靠近端口放置
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

