
如何使用降阶隆伯格观测器(ROLO)估算永磁同步电机(PMSM)的转子磁链位置。首先介绍特征值与稳定性的关系;在此基础上,引入状态反馈控制的理念;接着介绍如何使用该理念来设计隆伯格观测器;然后,以PMSM为例,推导ROLO的设计过程,给出设计结果;最后,介绍Microchip的相关电机控制方案(评估套件、例程和文档等)。
一、概述
永磁同步电机(PMSM)的磁场定向控制(FOC)在近十几年成为了主流的电机控制方法。其中,无位置传感器FOC由于其低成本和高可靠性,获得了越来越多的应用和关注。由于没有位置传感器,所以必须估算转子磁链位置。由于在旋转过程中,转子磁链生成反电动势(BEMF),并且BEMF超前转子磁链π2弧度,所以可以利用对BEMF进行观测,进而估算转子磁链。降阶隆伯格观测器(ROLO)是一种常用的BEMF观测手段。
一方面,工程师可能不具备设计观测器所需的背景知识;另一方面,产品开发项目必须尽快且高质量地完成。尽管可以找到背景知识的相关教材,但由于其缺少针对性,所以工程师不得不花费大量时间进行学习。该矛盾经常成为制约产品开发进度和质量的瓶颈。针对此困境,ROLO由于其原理简单,成为了能短时间掌握的优选方案。
本文针对PMSM控制所需,筛选出最少量的必需知识,按照逻辑顺序阐述利用ROLO观测BEMF的原理。此外,还介绍了Microchip的相关电机控制方案。读者可以借此快速掌握原理,并且上手实践和熟悉。
二、特征值与稳定性
常微分方程(ODE)是时间确定性系统的一种抽象模型。PMSM可以看作是一个线性时间确定性系统,因此可以用线性常微分方程来建模。
考虑以下的一般线性ODE:

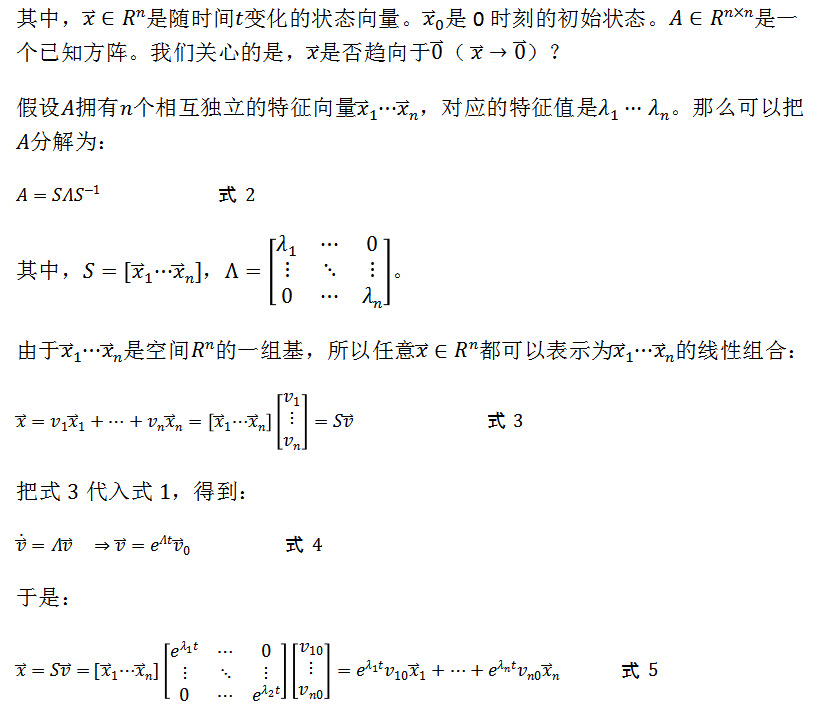

三、状态反馈控制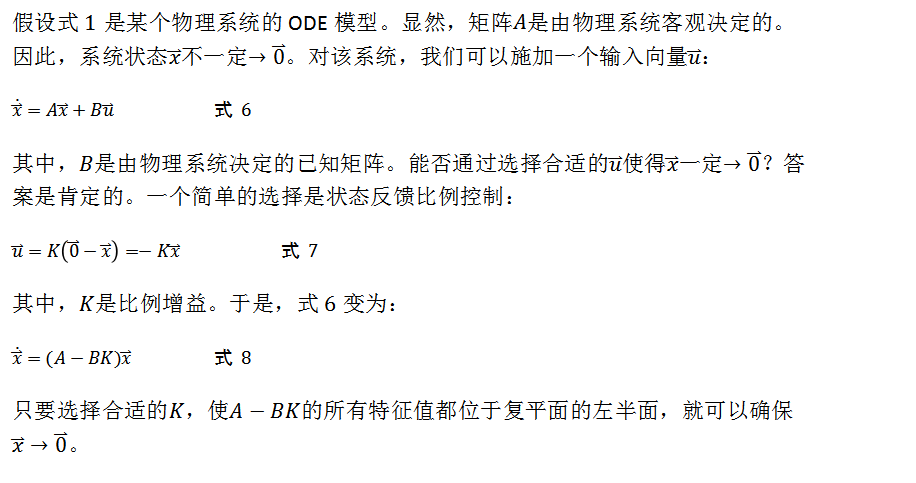
四、隆伯格观测器
考虑以下系统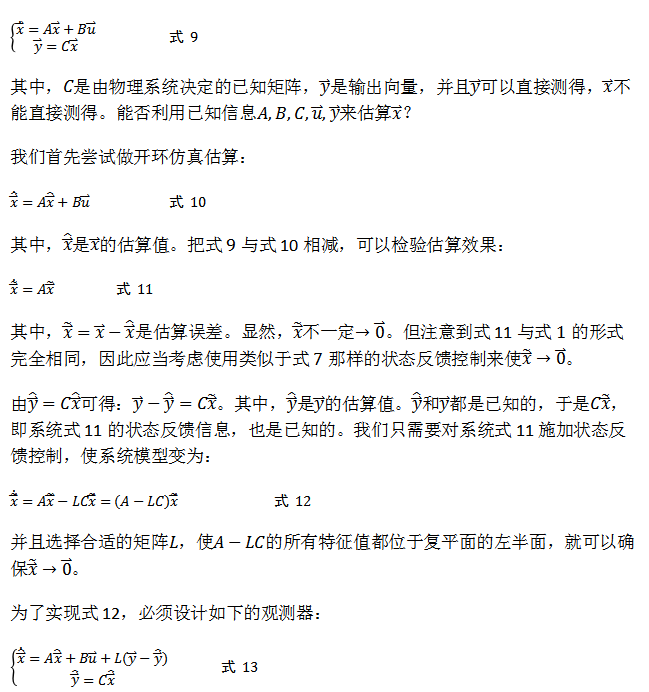
式13由斯坦福大学的大卫。隆伯格教授提出,因此命名为隆伯格观测器。
五、观测PMSM的BEMF
在静止两相坐标系(α-β坐标系)中,表贴式PMSM的电压方程为: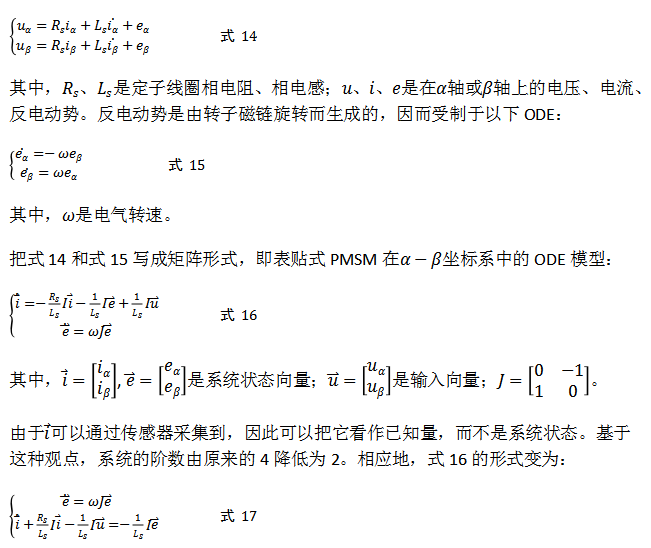
应当注意到,式17与式9的形式一致。读者能轻易地看出他们之间的对应关系。于是,只要根据式13就可以直接设计出针对e的隆伯格观测器。对此,本文不做展开,并鼓励读者亲自进行推导。需要指出的是,这样的观测器被称为降阶隆伯格观测器。
六、Microchip的ROLO方案
Microchip的基于ROLO的PMSM无传感器控制方案提供例程、评估套件、开发工具和帮助文档。
例程位于MPLAB®Harmony3的motorcontrol模块中,是一个运行在Cortex®-M0+MCU(SAMC21)之上的MPLABX工程:pmsm_foc_rolo_sam_c21。
该演示方案可以运行于MCLV2低压电机控制评估套件或MCHV3高压电机控制评估套件。两款评估套件均可在Microchip官网搜索并订购。
该例程利用图形化配置工具MPLABHarmony配置器(MHC)生成。使用MPLABXIDE打开该工程,并打开MHC,就可以看到CPU和所需片上周边(PWM模块和ADC等)的配置情况,如图1所示。
相应的帮助文档也位于MPLABHarmony3的motorcontrol模块中。其中介绍了如何搭建硬件平台、编译和下载工程、算法原理框图、软件流程图、软件配置方法等,如图2、图3、图4和图5所示。
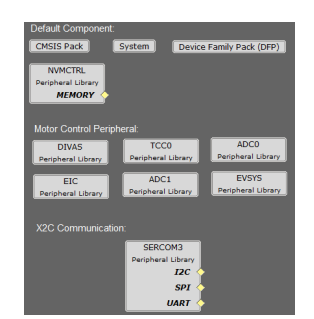
《图1.例程的MHC配置》
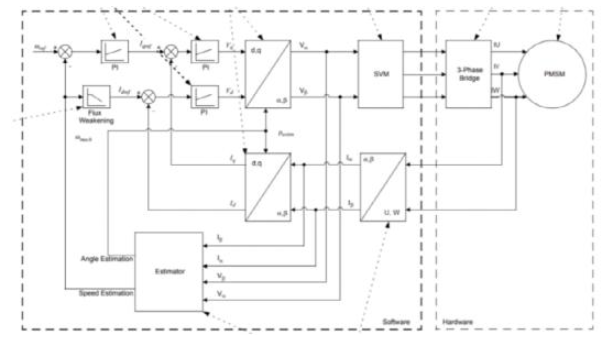
《图2.电机控制算法框图》
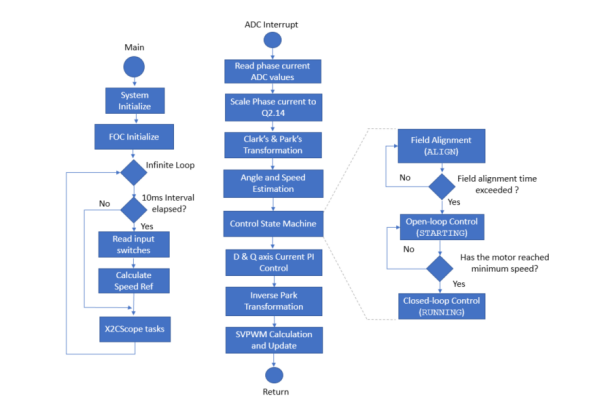
《图3.软件流程图》
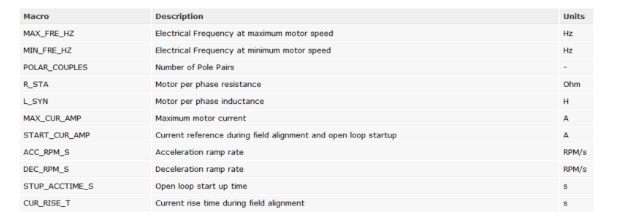
《图4.软件配置方法:电机参数宏定义列表》
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

