
什么是IMU
IMU 一般指6轴传感器,内部包含了3轴陀螺仪和3轴加速度计,3轴就是表示 XYZ 平面下的3个坐标轴。
3轴陀螺仪测量的是每个轴上面的角速度,精度一般为 °/s ,也就是按照这个趋势旋转,每秒钟能走过的度数。
3轴加速度计测量的是每个轴所受的重力加速度,比如传感器水平放置水平地面时,理论上只受到z轴负向的重力加速度,大小为9.8 m/s^2
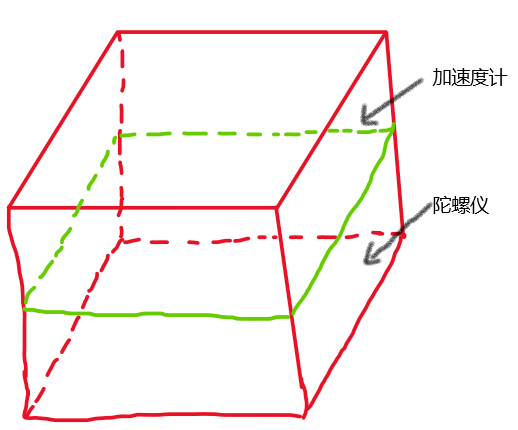
现在的IMU内部基本都是两个传感器(陀螺仪 和 加速度计)堆叠在一起组成的,这样做是为了让这两个传感器的3轴重合。
图示IMU原理
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

