
ADAS系统无人驾驶的眼睛--毫米波雷达
汽车已经进入无人驾驶探索阶段,可以主动防护汽车驾驶安全的高级驾驶辅助系统(以下简称:ADAS)技术也正在逐步的完善。
ADAS简单来说就是让汽车有感知系统,可感受环境的变化并随时做出响应。如何完成这种感知呢?
这就需要ADAS利用车上的各种传感器来收集汽车在行驶时周围的环境状态,比如静态、动态物体的识别等,收集之后再进行系统的运算和分析,让驾驶者可以准确的预判即将发生的危险,从而保证驾驶安全。
ADAS传感器种类很多,有摄像头、超声波传感器、激光雷达、毫米波雷达等。前面3种均很容易受恶劣天气(雨雾等)的影响而导致性能降低,甚至失效,或多或少都存在“致命”的缺陷!
但是毫米波雷达就不一样,它凭借可穿透尘雾、雨雪,不受恶劣天气影响等优点,且能够“24小时全天时”工作,成为了汽车ADAS不可或缺的核心传感器之一。
1:什么是毫米波?它和其他波的区别?
1)工作在毫米波波段(millimeter wave )探测的雷达。工作频段一般为30GHz ~ 300 GHz, 波长 1~10mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的一些优点;
2)毫米波雷达具有体积小、易集成和空间分辨率高的特点。
3)车载毫米波雷达的工作频率为一般为 24GHz 和77GHz ;
根据波的传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,所以与其他微波相比,毫米波的分辨率高、指向性好、抗干扰能力强和探测性能好。与红外相比,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。这些特质决定了毫米波雷达具有全天时、全天候的工作能力。 车载毫米波雷达主要集中在24GHz和77GHz这2个频段: 24GHz 雷达主要实现近程和中程探测,可用于汽车盲点监测、车道偏离预警、泊车辅助等功能。24GHz雷达是最早划分出来民用的,很长时间内汽车上都用这个。但是现在欧美对24GHz使用带宽有所限制,并且24GHz雷达的天线体积因为波长的原因相对较大。
77GHz 雷达可以实现远程探测,可用于自动紧急制动、自适应巡航、前向碰撞预警等主动安全领域的功能。77GHz雷达也可以实现短距和中短距离的汽车应用。77GHz的波长是3.9mm,是真正意义上的毫米波,正逐步取代24GHz,成为汽车领域主流的传感器。
2:毫米波雷达的基本结构
硬件核心:MMIC芯片和天线PCB板,以FMCW车载雷达系统为例,主要包括:天线、收发模块、信号处理模块;

1)前端单片微波集成电路(MMIC) ( 供应商:英飞凌、飞思卡尔 、厦门意行和南京米勒;)它包括多种功能电路,如低噪声放大器(LNA)、功率放大器、混频器、甚至收发系统等功能;
特点:电路损耗小、噪声低、频带宽、动态范围大、功率大、附加效率高、抗电磁辐射能力强等特点;
2)雷达天线高频PCB板:毫米波雷达天线的主流方案是微带阵列,即将高频PCB板集成在普通的PCB基板上实现天线的功能,需要在较小的集成空间中保持天线足够的信号强度。
3:毫米波雷达基本工作原理
1)利用高频电路产生特定调制频率(FMCW)的电磁波,并通过天线发送电磁波和接收从目标反射回来的电磁波,通过发送和接收电磁波的参数来计算目标的各个参数。
2)可以同时对多个目标进行测距、测速以及方位测量;测速是根据多普勒效应,而方位测量(包括水平角度和垂直角度)是通过天线的阵列方式来实现的。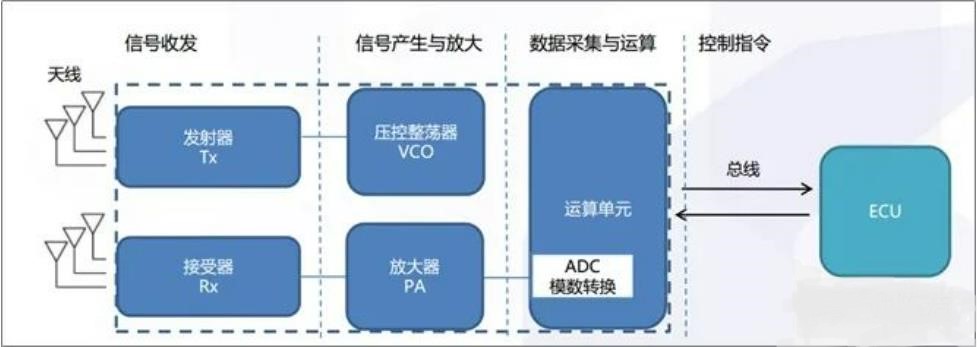
毫米波雷达基本工作原理示意图
4:毫米波雷达的工作体制
1)工作体制 :根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。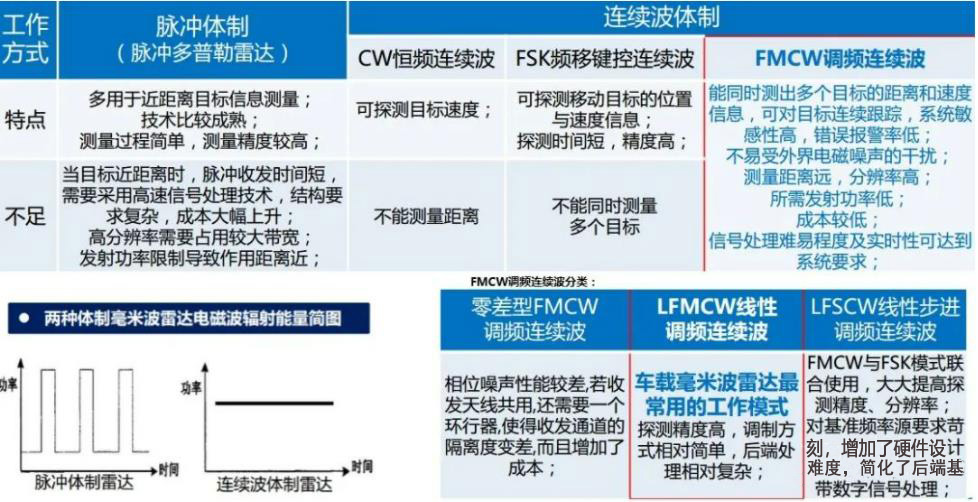
毫米波雷达不同工作体制
2)FMCW调频连续波雷达的不同调制形式:
a、正弦波调制 b、锯齿式波调制 c、三角波调制
不同调频方式的雷达硬件构成基本相同,只有小部分电路模块、电路参数与信号处理算法有所区别;对于单个静止物体的测量,锯齿波调制方式即可满足;对于运动物体,多采用三角波调制方式;
5:毫米波雷达测距、侧速、测方位角原理简介
测距:(TOF)通过给目标连续发送毫米波信号,然后用传感器接收从物体返回的毫米波,通过探测毫米波的飞行(往返)时间来得到目标物距离。
测速:根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量。
测方位角:通过并列的接收天线收到同一目标反射的雷达波的相位差计算得到目标的方位角;
6:毫米波雷达在自动驾驶功能上的应用
自动驾驶采用的传感器主要有摄像头、毫米波雷达、激光、超声波、红外等。毫米波雷达传输距离远,在传输窗口内大气衰减和损耗低,穿透性强,可以满足车辆对全天气候的适应性的要求,并且毫米波本身的特性,决定了毫米波雷达传感器器件尺寸小、重量轻等特性。很好的弥补了摄像头、激光、超声波、红外等其他传感器,在车载应用中所不具备的使用场景。
把毫米波雷达安装在汽车上,可以测量从雷达到被测物体之间的距离、角度和相对速度等。利用毫米波雷达可以实现自适应巡航控制(AdaptiveCruiseControl),前向防撞报警(ForwardCollisionWarning),盲点检测(BlindSpotDetection),辅助停车(Parkingaid),辅助变道(Lanechangeassistant),自主巡航控制(ACC)等高级驾驶辅助系统(ADAS)功能。比较常见的汽车毫米波雷达工作频率在24GHz和77GH附近。24GHz雷达系统主要实现近距离探测(SRR),而77GHz系统主要实现远距离的探测(LRR)。
目前,毫米波雷达主要为24GHz和77GHz。24GHz的雷达测量距离较短(5~30m),主要应用于汽车后方;77GHz的雷达测量距离较长(30~70m),主要应用于汽车前方和两侧。毫米波雷达主要包括雷达射频前端、信号处理系统、后端算法三部分。在现有的产品中,雷达后端算法的专利授权费用约占成本的50%,射频前端约占成本的40%,信号处理系统约占成本的10%。
1、射频前端:射频前端通过****和接收毫米波,得到中频信号,从中提取距离、速度等信息。因此,射频前端直接决定了雷达系统的性能。当前毫米波雷达射频前端主要为平面集成电路,有混合微波集成电路(HMIC)和单片微波集成电路(MMIC)两种形式。其中,MMIC形式的射频前端成本低,成品率高,适合于大规模生产。在生产工艺上,一般采用的是外延MESFET、HEMT和HBT等器件工艺。其中,GaAs基的HEMT工艺最为成熟,具有优秀的噪声性能。
2、信号处理系统:信号处理系统也是雷达重要的组成部分,通过嵌入不同的信号处理算法,提取从射频前端采集得到的中频信号,获得特定类型的目标信息。信号处理系统一般以DSP为核心,实现复杂的数字信号处理算法,满足雷达的实时性需求。
3、后端算法:后端算法占整个毫米波雷达成本的比例最高。针对毫米波雷达,国内研究人员从频域、时域、时频分析多个角度提出了大量的算法,离线实验的精度也较高。但是,国内的雷达产品主要采用基于频域的快速傅里叶变换及其改进算法进行分析,测量精度和适用范围有一定局限性而国外算法受专利严格保护,价格非常昂贵。
7:毫米波雷达发展进程
车载毫米波雷达的研究始于20世纪60年代,研究主要在以德、美、日等发达国家内展开。早期车载毫米波雷达发展缓慢,21世纪后随着汽车市场需求增长开始进入蓬勃发展期。在毫米波雷达的发展进程中,有一个绕不开的问题就是车载毫米波雷达频段划分。为避免与其他设备频段冲突,车载雷达需要分配专属频段,各国频段划分略有不同。2015年日内瓦世界无线电通信大会将77.5-78.0GHz频段划分给无线电定位业务,以支持短距离高分辨率车载雷达的发展,从而使76-81GHz都可用于车载雷达,为全球车载毫米波雷达的频率统一指明了方向。随着谷歌、百度的自动驾驶汽车上路,许多人也对自动驾驶技术充满期待。不过目前大部分汽车还处在ADAS(高级驾驶辅助系统)应用普及的阶段,在这个阶段中毫米波雷达就起到了很大的作用。 国际自动机工程师学会将智能驾驶的等级分为五个等级,目前我们正处于ADAS阶段。ADAS(Advanced Driver AssistantSystem)的普及是未来无人驾驶实现的先行条件,是提高汽车主动安全性能的技术基础。ADAS系统分为环境感知、计算分析、控制执行三大模块。其中传感器在环境感知模块中具有重要的作用,多种传感器融合应用是未来必然趋势,毫米波雷达将率先成为ADAS系统主力传感器,接下来看看毫米波产业链全景图。
8:全球毫米波雷达产业链全景图
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

