
作者:鄂东职业技术学院 李定 梁康 梁梦
指导教师:徐波 段瑞永
产品简介
1、开发背景:该作品的设计思路主要来源于人们对自然灾害、恐怖活动和各种突发事故等救援活动的开展。
2、结构说明:本系统创造性地采用了STC15F2K61S2单片机,无线可控模块,六自由度机械手,无线摄像头,蓝牙模块,升降台,动力部分等组成的无线可控救援机器人模拟系统以及带有以51为核心的侦察车。以STC15F2K61S2单片机平台作为机器人的总控制平台以C8051F020作为辅助控制平台,它包括模拟机械手的动作读取程序、机械手的控制程序和无线控制程序,通过读取模拟机械手上六个角度传感器的实时角度然后经无线模块传送到接收机上使接收机控制六自由度机械手做出各种相应动作。
3、使用说明:在救援过程中,可以通过远程可视监控,以控制臂控制机械手夹取和搬运物体,完成一些危险环境中的救援活动。十字摇杆控制机器人和侦查车的运动方向,按键控制升降台的升降。控制板上另外4个按键分别控制摄像头的上下左右四个方向的摆动。
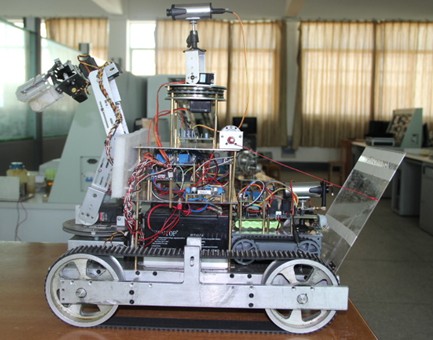
图一 机器人整体图
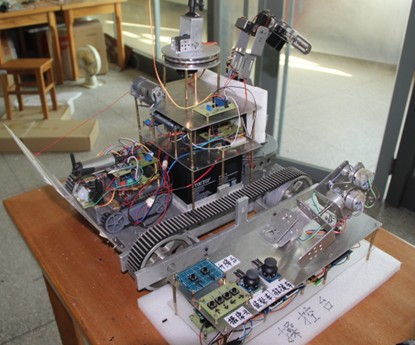
图二 机器人操控台
平台选型说明
以STC15F2K61S2单片机和无线传输模块为核心的总控平台,主要负责六自由度机械手和移动平台的控制,包括六自由度机械手的各个电机的动作控制和移动平台的前进、后退、左转、右转,升降台升降等控制,通过操作控制平台可以让机器人完成各种动作,经测试移动、搬运都非常成功和稳定。
设计说明
1 设计原理:六自由度机械手有六个伺服电机,所以机械手的控制最为困难,无论按键还是十字摇杆,都不能灵活地控制六个电机运动,所以我们想到用六个角度传感器模拟六自由度机械手的六个电机做出模拟机械手,其中六个角度传感器输出模拟量范围为0~5V,分别对应六自由度机械手的六个伺服电机0~180度的转动角度,由C8051F020单片机八路AD使用其中的六路AD转换通道读取六个角度传感器的模拟量并进行处理,剩下两路AD用来控制救援机器人的运动,AD采样的数据通过无线模块传输给机器人,故摆动模拟机械手便能灵活的控制六自由度机械手随其摆动,再配合无线视频,便能控制救援机器人抓取和搬运物体,达到救援目的。
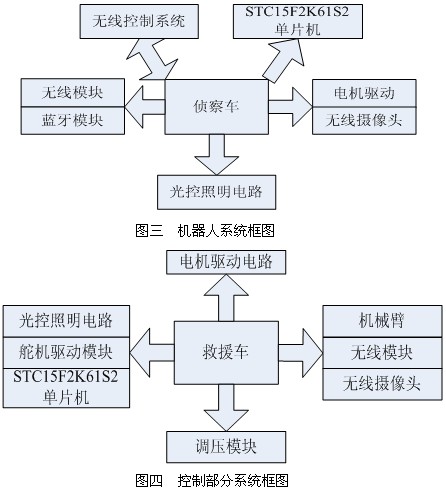
2 结构框图:
3 设计方案
◆机器人救援方式选择
【方案一】传统的救援
传统的救援方式用人工挖掘和利用大型设备,比如:起重机、挖掘机等进行挖掘。人工挖掘显然工作效率较低,而对于那些流血较为严重的被困伤员来说时间就是生命,另外,由于受损房屋的不稳定因素也会对被救人员的安全产生威胁。大型的机械设备在灾难发生后地形复杂而很难进入,而且大型设备挖掘过程中不稳定因素较高,从而可能产生被困人员的第二次伤害。
【方案二】现代的救援
随着科学技术的飞速发展,在救灾现场,我们可以看见救援机器人,在它身体部位安装传感器,通过人体感应可以在地震后的废墟里寻找幸存者的具体位置,另外在它脑袋上安装无线摄像头,可以很直观的返回信息,能实现计算机辅助控制等待点,可以将现场环境的图像返回到救灾中心,为进一步控制机器人的运动方向,制定下一步救灾的方案提供决策依据。同时,它具有灵活性好、机动性强的特点,有较好的爬坡和越障能力,能适应现场各种各样的地理环境,还可以克服传统救援的工作效率低、大型设备的不稳定性等特点。
综合考虑:我们选择方案二。
◆机器人类型选择
【方案一】蛇形机器人
蛇形机器人具有运动稳定性好、适应地形能力强和高的牵引力等特点,但多自由度的控制困难,运动速度低。
【方案二】轮式机器人
轮式机器人具有结构简单、重量轻、轮式滚动摩擦阻力小和机械率高等特点,但越过壕沟、台阶的能力差。
【方案三】履带式机器人
履带式机器人具有动载荷小,设计紧凑等特点。它能够平稳、迅速、安全地通过各种复杂路况。由于接地面积大可以减小单位面积压力,对路面的要求不高。履带上有花纹,所以在雪、雨、冰、上坡等路面上能牢牢地抓住地面、不会滑转。
综合考虑:我们选择方案三。
3.1单片机模块
单片机模块为STC15F2K61S2模块,STC15F2K61S2单片机带有八路AD转换通道,能够快速、准确的读取模拟机械手上六个角度传感器输出的模拟量,并对数据进行处理,再经无线模块将数据传送给接收机,使其做出相应动作。
3.2六自由度机械手
机械手为德普斯机械手。它主要由执行机构、驱动系统、控制系统以及位置检测装置等组成。该机械手由六个伺服电机作为动力系统,其构造仿生于人类的手臂,能够灵活的全方位转动,完成各项命令。
3.3无线摄像头
无线摄像头具有采集视频和音频的功能,3.7V~5V供电,55度视角,30万像素,采用2.4G载波信号,无线接收距离空旷无阻高达100米,有阻高达30米。它可以处理多达4个通道视频输入,720*576宽屏, 体积小,拍摄的影像高达每秒30帧的速度从USB视频捕获设备,摄像清晰,色彩鲜艳。
3.4无线传输模块
无线传输模块采用nRF905和APC220 无线模块,nRF905该模块在Nordic VLSI公司最新封装改版nRF905基础上优化设计,体积更小,距离更远,同时抗干扰性强,通信稳定,特别适用于工业控制领域,是目前最主流的无线收发方案。
3.5控制臂
控制臂采用六个角度传感器构成。六个角度传感器的实时角度经无线模块传送到接收机上使接收机控制六自由度机械手做出相应动作。
3.6按键模块
十字摇杆为两个双向的10K电位器和一个按键构成,随着十字摇杆方向不同,抽头的阻值随着变化。本模块只是使用5V供电,原始状态下X,Y读出电压为2.5V左右,当随箭头方向按下,读出电压值随着增加,最大到5V;箭头相反方向按下,读出电压值减少,最小为0V,其作用为控制机器人和车的运动方向,按键控制升降台的升降。控制板上另外4个按键分别控制摄像头的上下左右四个方向的摆动,以便更好的观察地形。
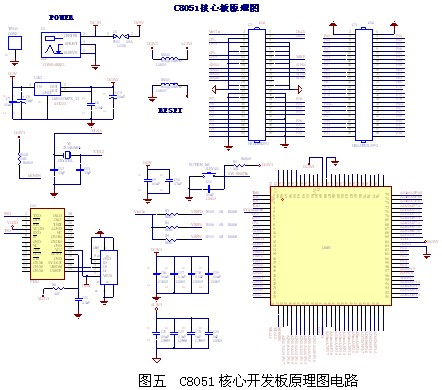
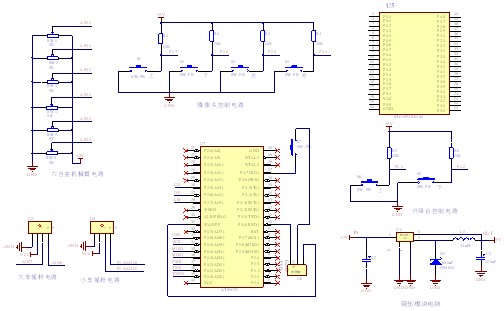
4原理图


产品特色
六自由度机械手的控制用到了模拟机械手。模拟机械手由六个角度传感器仿照六自由度机械手的六个关节构成。六个角度传感器的实时角度经无线模块传送到接收机上使接收机控制六自由度机械手做出相应动作。我们的机器人以其体积小,灵活性较好,机动性强,可远程无线操作等优势,在危险环境中,如果我们采用救援机器人,在它身上装备各种先进的传感器和生命安全探测器,安装多角度的无线摄像头,救援人员可以在可视范围内进行操作和控制,加装灵活有力的机械臂和其他救援设备,这样便能发现甚至排除未知的危险,为救援争取一定的时间,尽最大可能减少人员伤亡。
系统演示视频:http://v.eepw.com.cn/video/play/id/2275
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

