
作者:莱芜职业技术学院 张衍进 冷和臣 冯宇
指导教师:张荣涛 何奉昌
作品简介
智能探测车属于智能移动机器人范畴。随着应用范围的不断拓宽,智能探测车所面临的工作环境也越来越复杂,往往是未知的、非结构化的,所以,智能探测车要在这种环境下实时地、安全地完成各种探测任务, 采集的数据实时显示数据并进行播报是智能探测车设计的关键部分之一,也是智能探测车智能化的重要体现。
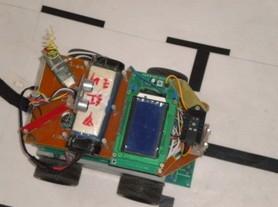
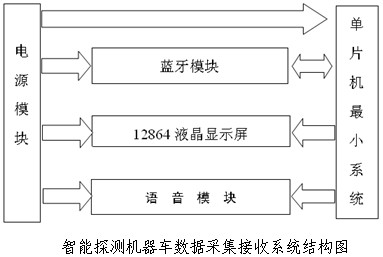
本系统智能小车部分采用STC15F2K60S2单片机作为智能探测机器车的主控芯片,选用L298N芯片作为电机驱动模块,采用串口蓝牙作为无线通讯模块,设计了黑白线循迹模块、超声波检测模块、颜色检测模块等单元。将模块装载到四轮驱动机器车上,通过L298N芯片驱动直流电机带动小车行进;智能探测机器车采集数据的接收系统采用STC15F2K60S2单片机作为主控芯片,通过串口蓝牙通讯接收智能探测机器车采集数据,用12864液晶实现数据显示,SYN6288模块完成语音播报。
功能:(1)智能探测机器车能沿循迹线行走一周,同时完成4个定位点的精确定位,误差小于5°。(2)智能探测机器车能沿循迹线行走一周,并在规定区域完成360度转身。(3)智能探测机器车能沿循迹线行走一周,完成数据采集及显示。(4)用单片机设计并制作一个能接收智能探测机器车采集数据的接收系统,接收智能探测机器车采集数据实时显示数据并进行播报。
平台选型说明
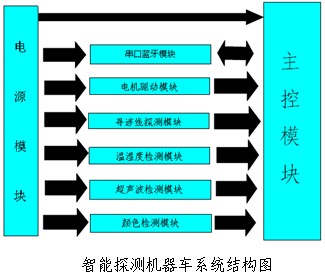
按照系统的设计功能要求,确定智能探测机器车由单片机主控模块(最小系统)、稳压电源模块、电机驱动模块、寻迹线探测模块、温湿度检测模块、超声波检测模块、颜色检测模块和串口蓝牙模块共8个模块组成,电路系统框图下图所示。
智能探测机器车数据采集接收系统
采用串口蓝牙模块进行无线通信。串口蓝牙模块可以让原来使用串口的设备摆脱线缆的束缚在10米范围内实现无线串口通信。而且控制容易上手,程序灵活。采用颜色传感器TCS3200D自制的模块进行颜色识别,检测距离10mm以内RGB值准确度高,
设计说明
信号检测与控制
跑道由细木工板和黑胶带组成,对于此类信号的检测多采用检测黑胶带的方式,通常采取的方法是红外探测法。红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向跑道发射红外光,当红外光遇到细木工板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被黑线吸收,小车上的接收管接收不到红外光。接收管可以将接收到光信号的强弱转变成电信号的变化,将变化的电信号通过比较器后转变成高低电平供单片机采样。
在系统设计中,我们将8对光电传感器安放在小车的前排,8对光电传感器安放在小车的中间位置,以实现小车对跑道起点/终点线、转弯线、定位线、转身线的判断。如果两侧传感器先检测到黑线,那表明小车到了跑道边沿;如果前排光电传感器检测到黑线、后排光电传感器有的检测到黑线,那么表明小车到了360度转身区线。
系统通过四个电机的差速控制小车的转弯。当单片机输出同样占空比的PWM信号给电机驱动模块时,可以控制小车走直线;当单片机输出不同占空比的PWM信号给电机驱动模块时,四电机的转速不一样,从而控制小车转弯。
智能探测机器车和数据采集接收系统之间的通信方法
智能探测机器车和数据采集接收系统之间的通信用串口蓝牙模块实现,具体运行方式如下:
智能探测机器车采集到数据时,给数据采集接收系统信息,数据采集接收系统进行显示与播报。
节能
小车采用主要采用光电开关作为传感器,功率小,符合节能要求;另外用充电电池取代干电池作为电源,节约了资源,减少了浪费。小车的制作过程,采用了质量较轻的材料,减小了电动机负载,从而节省电源。
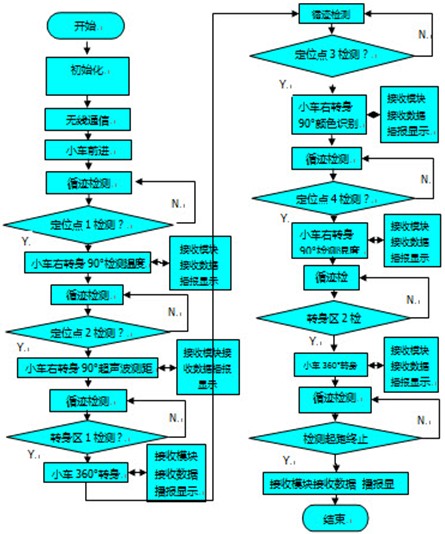
主程序流程图为:
子程序调试包括:
1、L298N型号芯片电机驱动功能、PWM调速功能。
2、串口蓝牙无线通讯功能。
3、测温驱动程序
4、测距驱动程序
5、转身1驱动程序
6、颜色识别驱动程序
7、湿度测试驱动程序
8、转身2驱动程序
9、12864液晶驱动程序
10、SYN6288语音驱动程序
测试方法与测试结果
光电传感器测试
光电传感器对白纸与黑线反应灵敏,靠近白纸时,显示高电平;靠近黑线时显示低电平。我们在小车前方及小车底盘下中间位置距地面1cm处安装光电开关,经测试,效果明显。
电机驱动电路测试
四个电机直接用电源供电,并手动加信号进行驱动,观看电机转速及测量电机两端电压。
电机状态见下表:

作品特色
本系统智能小车部分采用STC15F2K60S2单片机作为智能探测机器车的主控芯片,选用L298N芯片作为电机驱动模块,采用串口蓝牙作为无线通讯模块,设计了黑白线循迹模块、超声波检测模块、颜色检测模块等单元。将模块装载到四轮驱动机器车上,通过L298N芯片驱动直流电机带动小车行进;智能探测机器车采集数据的接收系统采用STC15F2K60S2单片机作为主控芯片,通过串口蓝牙通讯接收智能探测机器车采集数据,用12864液晶实现数据显示,SYN6288模块完成语音播报。
特色功能:
(1)智能探测机器车能沿循迹线行走一周,同时完成4个定位点的精确定位,误差小于5°。
(2)智能探测机器车能沿循迹线行走一周,并在规定区域完成360度转身。
(3)智能探测机器车能沿循迹线行走一周,完成数据采集及显示。
(4)用单片机设计并制作一个能接收智能探测机器车采集数据的接收系统,接收智能探测机器车采集数据实时显示数据并进行播报。
系统演示视频:http://v.eepw.com.cn/video/play/id/2720
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

