
作者:内蒙古科技大学 曹福意 齐耀旭 杨鹏
指导教师:郭宇
产品简介
1.1课题背景
随着汽车在日常生活中的普及,人们对汽车多功能性的需求也越来越多。在这些需求当中重中之重的是汽车的安全性能,这关系到生命的安全。就此我们对汽车的安全性能进行创新设计,根据超声波实际的功能安装在汽车上用于测距,对于驾驶者来说这是一个贴心的设计,不仅为驾驶者带来了保障,也为行人带来了安全。为了安全的进一步提升又加入了红外线避障,通过对光的灵敏度来为汽车加上双重保险,此外还有霍尔元件的测速显示来提示驾驶员超速问题。
1.2结构说明
根据系统的设计要求作品分为7个模块,具体如图1所示。
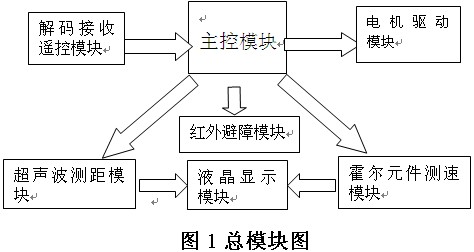
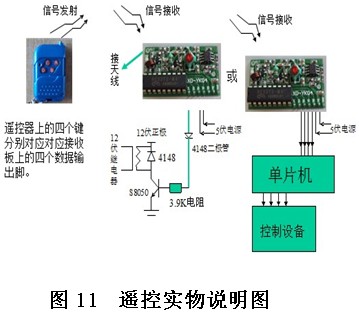
(1)解码接收遥控模块:
接收模块一共有八个外部接口,“5V”表示接电源正极,“ D0、 D1、 D2、 D3”表示输出,“GND”表示接电源负极,“ANT”表示接天线端。
(2)液晶显示模块:
模块采用1602液晶显示作为人机交互的界面,通过液晶屏可以很直观的看到超声波测试的距离和霍尔元件测出的速度值。
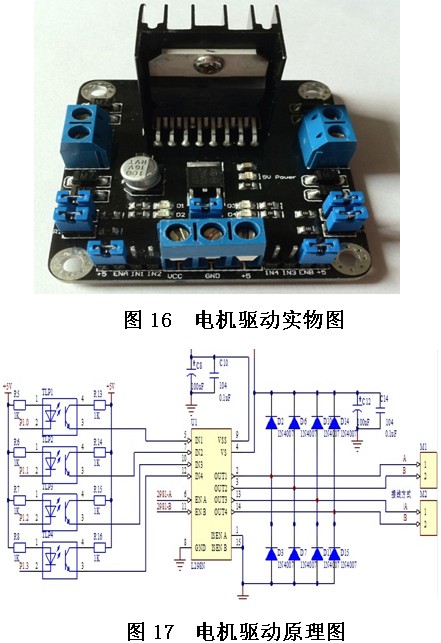
(3)L298N模块:
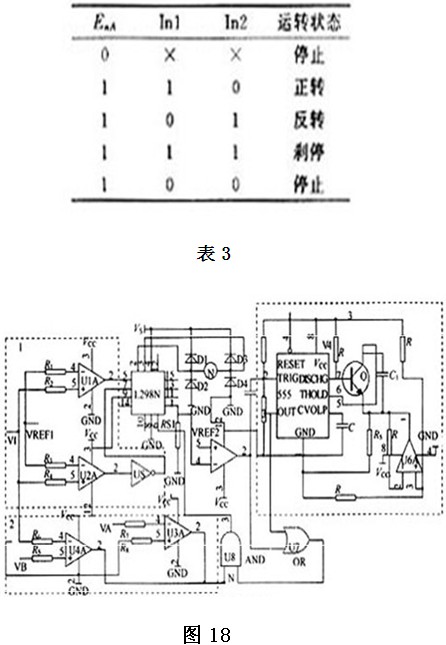
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。
(4)超声波测距模块:
HC-SR04超声波测距模块可提供2CM-400CM的非接触式距离感测功能,测距精度可达到3mm;模块包括超声波发射器、接收器与控制电路。
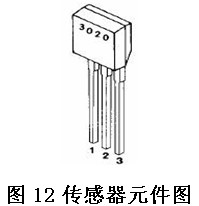
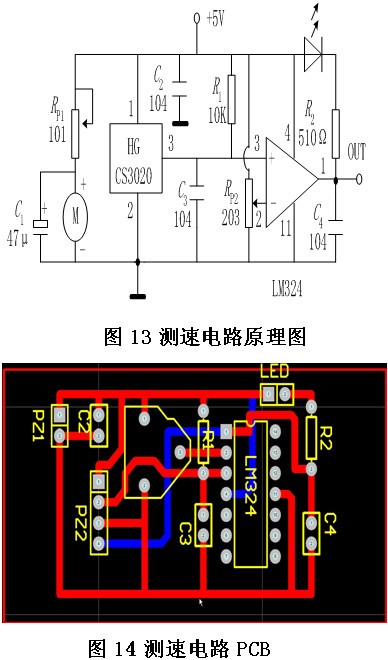
(5)霍尔元件测速模块:
霍尔传感器是对磁敏感的传感元件,这里采用的是3144型号的传感器,它是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC)门输出。
(6)红外避障模块:
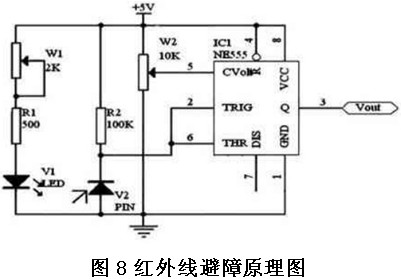
红外避障是红外线发射管与红外线接受管。红外线接受管是一个具有光敏特征的PN结,属于光敏二极管,具有单向导电性,因此工作时需加上反向电压。
1.3功能与使用说明
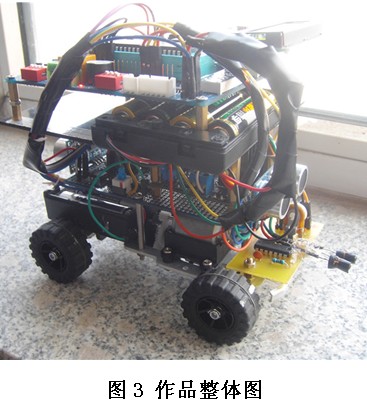
具体功能与使用如下图2和图3所示
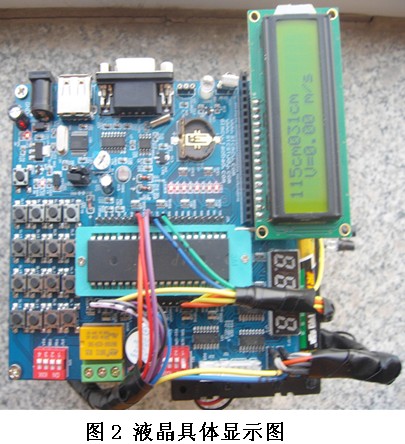
(1)功能:
本产品可以实现用遥控的方式控制小车的前进,后退,左转向,右转向,用液晶1602来显示超声波测距的数值和霍尔元件测出的速度值。当安全距离小于30cm时,汽车会通过主控自动做出反映,是否采取反方向行驶的措施,来确保行人的安全。由于汽车的惯性问题,红外线对管的灵敏检测功能无疑是对汽车的双重保障。
(2)使用说明:
本作品采用双6V开关电源电池盒,一个用于主控电源,另一个用于小车驱动电机电源。接通电源后按一下单片机的复位开关,此时我们可以看到液晶显示屏上出现的前后超声波测距数值和霍尔元件的测速值,遥控按键C是前进,A是后退,D是左转向,B是右转向,然后便可以测试小车的各项功能。
平台选型说明
2.1 主控制模块
本模块采用比赛所要求的最新STC15系列IAP1F2K61S2,其原理图和实物图如
图4、图5所示

本模块采用比赛所要求的最新STC15系列IAP15F2K61S2。IAP,在系统可编程/在应用编程,无需编程器,无需仿真器,可当仿真器使用。增强型8051CPU,1T,单时钟/机械周期,速度比普通的快8-12倍。61K字节片内FLASH程序存储器,擦写次数10万次以上。片内大容量2048字节的SRAM,共8通道10位高速ADC,速度可达30万次每秒,3路PWM还可当3路A/D使用。共3通道捕获/比较单元(CCP/PWM/PCA),内部高可靠抚慰,8极可选复位门槛电压,彻底省掉外部复位电路。内部高精度R/C时钟,内部时钟从5MHz-35MHz可选。各种接口扩展齐全。两组高速一步串行通信接口(可同时使用),可在5组管脚之间进行切换,分时复用可当5组串行口使用。一组高速异步串行通信端口SPI,一根幼稚USB线实现系统供电、程序下载、通信功能。
单片机芯片配置40引脚STC系列插座,采用STC15系列IAP15F2K61S2。
显示模块配置8路LED输出,配置8位8段共阳数码管,配置LCD1602、LCD12864和TFT液晶接口
输入/输出模块配置4*4键盘矩阵,其中16个按键可通过跳线配置为独立按键,配置ULN2003功率放大器,驱动继电器、蜂鸣器、步进电机、直流电机。
传感模块配置红外一体投1838及红外发射管,配置光敏电阻和数值温度传感器DS18B20接口。
电源可以是USB和外接8-12V直流电源双电源供电。通信功能板接USB转串口和RS232串口,单总线扩展,可以外接其他单总线接口器件,I2C总线。
设计说明
3.1设计要求
(1)解码接收遥控模块和L298N电机驱动可以控制小车的前进,后退,左转向,右转向,小车可以流畅的任何方向的行驶来达到我们预期的要求。
(2)红外线对管模块在不断的调试下可以在任何光强作用下灵敏的做出反映,来达到我们对小车制动的控制。
(3)超声波测距模块的测距值要灵敏精确,当小车行驶到安全距离时,可以快速的反映给主控,然后主控在做出判断是否要继续前进还是后退。
(4)霍尔元件在对准磁钢的情况下获得脉冲的反映要快速准确,精确的计算出小车的速度。
(5)液晶1602的屏幕要干净整洁,易于观察测出的距离和速度值。
(6)主控部分引脚接线整洁,易于操作。
3.2系统硬件电路设计
3.2.1 HC-SR04超声波测距模块
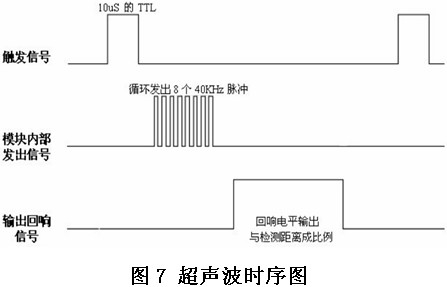
VCC供5v电源,GND为地线,TRIG触发控制信号输入,ECHO回响信号输出。模块如图6所示
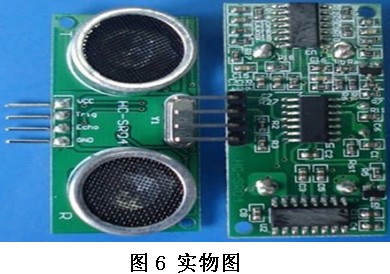
HC-SR04超声波测距模块可提供2CM-400CM的非接触式距离感测功能,测距精度可达到3mm;模块包括超声波发射器、接收器与控制电路。基本工作原理:才用IO口TRIG出发测距,给至少10us的高电平信号;模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S)/2;电气参数,时序图如图所示

3.2.2 红外避障模块
原理图,PCB图,实物图如图8,图9,图10所示




 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

