
作者:内蒙古科技大学 李骞 田鹏 夏万品
指导教师:郭宇
产品简介
1.1开发背景
社会在发展,人类在进步,但是全世界却每年都遭受着大量自然和人为灾害的破坏。复杂危险的灾害现场给救援人员及幸存者带来了巨大的安全威胁,也会阻碍救援工作快速有效地进行。使用救援机器人进行辅助搜救是解决这一难题的有效手段:救援机器人和操作者的任务就是寻找被困者,确定被困者状态、所处环境。
wifi,是由一个名为“无线以太网相容联盟”(Wireless Ethernet Compatibility Alliance,WECA)的组织所发布的业界术语,中文译为“无线相容认证”。它是一种短程无线传输技术,能够在数百英尺范围内支持互联网接入的无线电信号。
通过wifi无限传输视频,再由救援人员控制机器人,这样即保障了救援人员的安全,又能达到救援目的,发展救援机器人已经成为救援进步的趋势。
1.2 结构说明
根据系统的设计要求,作品主要分为8个模块,具体如下图所示。
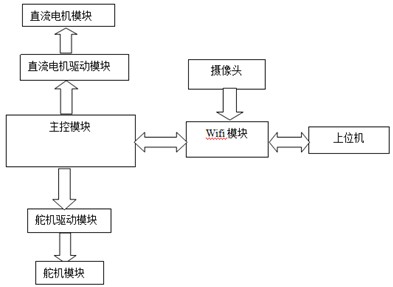
(1) 主控模块:本模块是比赛所提供的宏晶公司最新STC15系列IAP15F2K61S2芯片。ISP/IAP,在系统可编程/在应用可编程,无需编程器,无需仿真器。可当仿真器使用。
(2)wifi模块:通过wifi模块,实现上位机与机器人的连接,使得救援人员可以通过上位机控制机器人的动作,并且实现视频的传输。
(3)上位机:用C#编写,显示wifi传输的视频图像,让人清晰的看到机器人周围的情况,从而控制机器人的动作。
(4)直流电机驱动模块:通过L293控制电流的方向,从而实现电机的正反转。
(5)舵机驱动模块:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标而停止。
1.3功能与使用说明
实物图如图(1)
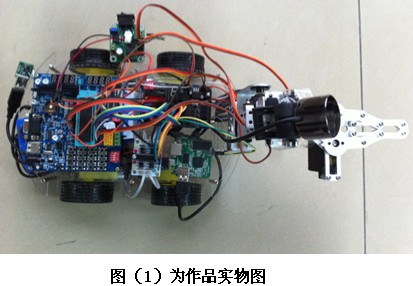
(1)功能:本作品可以通过wifi传视频给上位机控制小车的前进后退左转右转,机械手臂的运转以及抓放。
(2)使用说明:给直流电机接上12伏的电压,舵机接上7伏的电压,主控板和舵机驱动以及直流电机驱动和wifi模块接上5伏的电压,连接好后,通过控制上位机来实现机器人的运动,例如,点击上位机的左,机器人将向左方向行驶。
平台选型说明
主控部分采用比赛组委会提供的宏晶公司最新STC15系列IAP15F2K61S2芯片,本单片机简单、可靠,控制功能有了很大的提高,而且成本相比于其他主控低。其原理图和实物图如(2),(3)下图所示
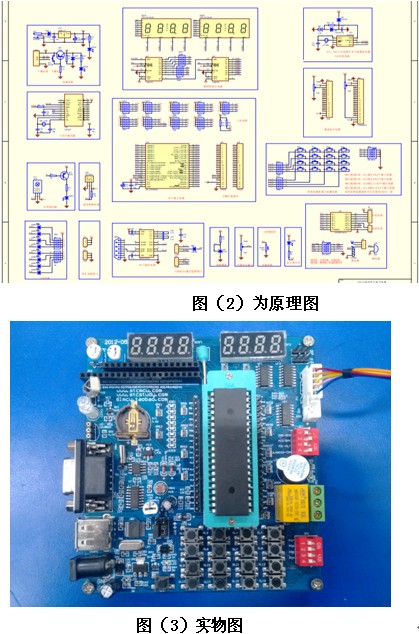
1.采用宏晶公司最新STC15系列IAP15F2K61S2芯片。ISP/IAP,在系统可编程/在应用可编程,无需编程器,无需仿真器。可当仿真器使用。
2.增强型8051CPU,1T,单时钟/机器周期,速度比普通8051快8-12倍。
3.61K字节片内片内Flash程序存储器,擦写次数10万次以上。
4.片内大容量2048字节的SRAM。
5.大容量片内EEPROM,擦写次数10万次数以上。
6.共8通道10位高速ADC,速度可达30万次/秒,3路PWM还可当3路D/A使用。
7.共3通道捕获/比较单元(CCP/PWM/PCA)。
8.内部高可靠复位,8级可选复位门槛电压,彻底省掉外部复位电路。
9.内部高精度R/C时钟,内部时钟从5MHz~35MHz可选,相当于普通8051的60MHz~420MHz。
10.两组高速异步串行通信端口(可同时使用),可在5组管脚之间进行切换,分时复用可当5组串口使用。
11.一组高速异步串行通信端口SPI。
12.各种接口扩展齐全。
13.一根优质USB线实现系统供电、程序下载、通信功能。
设计说明
3.1设计要求
(1)上位机控制小车前进后退,左右移动。
(2)上位机控制手臂可以抓起物品。
(3)主控部分引脚接线整洁,易于操作。
(4)上位机看起来美观,整洁,有视频可以观察机器人周围的环境。
3.2系统硬件电路设计
3.2.1驱动以及电机模块
驱动分为俩部分,一部分是直流电机的驱动,另一部分是舵机的驱动。
原理图和实物图如下图(4),(5)所示:
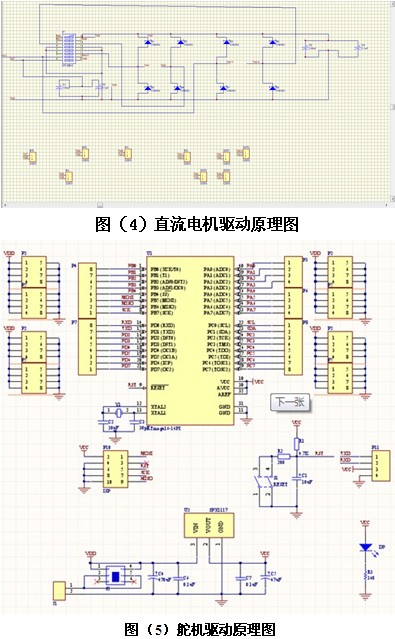
L293电机驱动板,可以驱动两个直流电机,本设计中,每一路L293输出引出了两个并联的端口,以便控制四轮的小车,左右两边的电机并联运行的。L293有两个电压输入,一个给电机的电压,一个是给芯片工作与控制逻辑的参考电压。L293相当于有四个驱动门,每个IN1,对应该一个OUT1,当IN1为高电平,OUT1输出高电平时,电压为VSS,也就是给这个芯片电机的供电电压。
本设计每个两个驱动门做成一路控制电机的信号,这样可以使电机在四个象限运行,即正转,反转,停车,自由滑行。ENA与ENB的使能的控制,如果采用PWM对电机进行调速,可以在ENA与ENB中分别接入PWM信号,IN1与IN2,和IN3与IN4,分别可以控制电机的正反转与不转。
舵机工作原理是控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。PWM信号由接收通道进入信号解调电路进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差该输出送入电机驱动,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
舵机的输入线共有三条,红色是电源线,一边棕色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。另外一根线是控制信号线,橙色。
3.2.2 wifi模块
实物图如图(6)所示:

Wifi模块为串口或TTL电平转WIFI通信的一种传输转换产品,Uart-Wifi模块是基于Uart接口的符合wifi无线网络标准的嵌入式模块,内置无线网络协议IEEE802.11协议栈以及TCP/IP协议栈,能够实现用户串口或TTL电平数据到无线网络之间的转换。
本模块支持在联网过程中绑定目的网络BSSID地址的功能。根据802.11协议规定,不同的无线网络可以具有相同的网络名称(也就是SSID/ESSID),但是必须对应一个唯一的BSSID 地址。通过BSSID地址绑定的方式,可以防止STA 接入到非法的网络,从而提高无线网络的安全性。
将WIFI模块操作系统刷成OpenWrt,OpenWrt被描述为一个嵌入式设备的Linux发行版,而不是试图建立一个单一的,静态的固件,OpenWrt的包管理提供了一个完全可写的文件系统,从应用程序供应商提供的选择和配置,并允许您自定义的设备,以适应任何应用程序通过使用包。操作系统刷成OpenWrt,即是使WIFI模块成为一个小型的Linux操作系统,将Linux下的摄像头驱动安装到WIFI模块上,把视频通过无线功能发送到电脑控制端。上位机利用Socket,把特定的数据包发送到WIFI模块,再完整的转发给单片机,进而达到控制机器人动作的目的。
3.2.3上位机
上位机采用C#语言编写,平台选为Microsoft Visual Studio 2010。上位机软件流程图如图(7)所示:

STEP1:上位机初始化,定义程序所需的各个变量。
STEP2:创建Socket,用于串口转发。使下位机接收上位机的操作指令。
STEP3:上位机语句判断连接到服务器,并发送测试信息。
STEP4:判断已连接则可以接收视频,并与下位机之间进行通信,进而控制机器人的动作。如果未连接到服务器,则返回至程序初始化处,等待连接。下图为上位接收视频和参数设置界面:

3.3软件系统设计
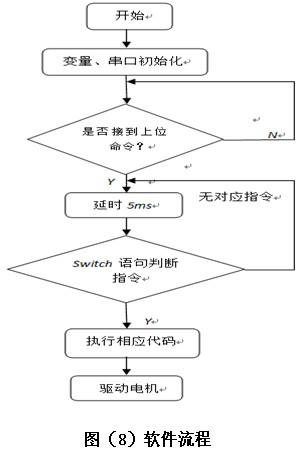
软件流程图如图(8)所示:
STEP1:硬件各模块上电后,单片机串口初始化,定义程序所需的各个变量。其中一个变量是记录从串口接收的数据。
STEP2:程序中使用延时函数,使系统稳定。
STEP3:switch语句判断单片机是否收到上位机通过wifi模块无线传输过来的指令。使用while(1)语句一直检测,以便做出下一步动作。
STEP4:单片机判断接收到上位机指令,通过switch语句执行各个动作相应的代码。进而控制机器人的动作。如果接受到的指令在程序中没有给出,则跳出函数,直至接受到相应的指令。
产品特色
4.1实用性
本作品实用性很强,可以做救援小车,也可以应用在智能家居。人只需要控制电脑就可以完成所需的动作,例如在很窄的地方,那些人进不去的地方,小车可以轻松完成动作,通过机械手臂可以拿放物品。同时,WIFI模块安装简便,安装位置灵活,功耗小,具有较强的抗干扰能力和灵敏度。能够将机器人周围的信息和安全信息实时的显示于上位机监控软件上。
4.2创新性
本作品最大的创新点是将机器人与WIFI技术结合,采用WIFI短程无线通信技术,构建一个智能化、现代化、安全性高的无线通信控制机器人的解决方案。将挂载在WIFI模块上的摄像头采集到的救援现场视频通过WIFI无线通信技术传送到上位机,利用上位机根据传回的视频画面向机器人的控制装置发送指令,进而达到远程无线控制的目的。
4.3先进性
本作品能够实现机器人的智能化、自动化、人性化的统一管理,具有很广阔的发展前景。同时,当代社会,是以人为本,人类越来越关注安全问题,本作品,通过远程遥控,可以大大降低救援人员的危险系数,随着社会的进步,人类将会越来越利用无线WIFI技术。
系统演示视频:http://v.eepw.com.cn/video/play/id/2585
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

